Epuck2机器人是一款最新的科研教学实践使用的多功能移动机器人。由EPFL和GCtronic两个机构合作研发生产。 这款机器人的全貌如上图所示,主控芯片是STM32F4,具备蓝牙、WIFI等通信功能。 详情请参见官网:Epuck2科研...
”移动机器人Epuck2“ 的搜索结果
matlab开发-非完整移动机器人
标签: 未分类
matlab开发-非完整移动机器人。一个具有两个连杆操纵器的轮子移动机器人的动画建模。运行roboticprojectcase1.m或

5. 轮子: ePuck机器人配备了2个麦克纳姆轮和2个普通轮,可实现灵活的移动和转向。 6. LED灯: ePuck机器人具有多个LED灯,可以用于指示机器人状态或进行编程调试。 总之,ePuck机器人具有一系列的传感器和硬件配置...
2. 机器人学研究:ePuck机器人是一个理想的机器人学研究平台。它可以用于探索自主移动、行为建模和路径规划等问题。ePuck机器人可以被程序员编程控制,因此可以用于测试各种算法和控制策略。 3. 人工智能研究:...
# 向前移动机器人 robot.forward() elif key == ord('S'): # 向后移动机器人 robot.backward() elif key == ord('A'): # 向左移动机器人 robot.turn_left() elif key == ord('D'): # 向右移动机器人 ...
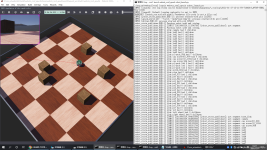
步骤 2:在 Webots 软件中创建一个新的 World,并将 epuck 机器人模型添加到场景中。 步骤 3:在 Webots 软件中打开控制台(Console)。 步骤 4:在控制台中输入以下代码,启动 epuck 机器人模型: ``` $./epuck ...
在基于Webots虚拟移动机器人仿真软件提供的环境下,以Epuck轮式机器人为实验平台,设计了模糊PID控制器并提出了一种模糊PID控制算法,在Webots软件的代码区写入模糊PID控制算法来控制机器人的运动,最后将实验结果与...
// 向前移动机器人 wb_motor_set_velocity(left_motor, 1.0); wb_motor_set_velocity(right_motor, 1.0); } else if (key == WB_KEYBOARD_DOWN) { // 向后移动机器人 wb_motor_set_velocity(left_motor, -1.0)...
行动需要指挥才更高效。 思想需要碰撞才能擦出火花。 一个人的力量终究是渺小...E-PUCK2 RGB显示与定位 基于E-puck嵌入式多智能体协同实验平台 E-puck 2.0机器人,因为其自身的优点,个个都能成为机器人群体协作.
本仿真完成参考了往届学长的思路流程并在其中调整了货堆摆放位置、修改了视觉处理及循迹策略,同时增加了障碍物与避障功能等一系列改进。
Epuck2机器人是一款最新的科研教学实践使用的多功能移动机器人。由EPFL和GCtronic两个机构合作研发生产。 这款机器人的全...
ROS2机器人操作系统零基础快速入门 https://zhuanlan.zhihu.com/p/96940278 学完ros2基础和webots基础最多需要8+8=16小时足矣,每天学习3小时,一周搞定! 分封就是在基础掌握之后,开始划分专业方向了,...
E-puck机器人 一、技术参数 dsPIC 30F6014A 二、软件 e-puck-library-master文件夹 BasicDemos.zip 三、编译 MPLAB是什么? pic单片机是什么? 四、PC人机交互界面 五、标准固件 E-puck机器人 一、技术...
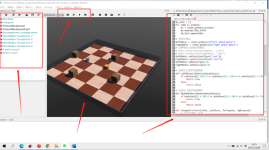
Webots是专业的移动机器人仿真软件包。它提供了快速的原型制作环境,使用户可以创建具有物理特性(例如质量,关节,摩擦系数等)的3D虚拟世界。用户可以添加简单的被动对象或称为移动机器人的主动对象。这些机器人...
从零入手第一个Webots入门案例
C programming语言用于为e-puck2机器人的主微控制器开发代码。选择将ChibiOS嵌入式实时操作系统集成到固件中,因为它支持STM32F4系列微处理器,它包括一个HAL(硬件抽象层),它有很好的文档记录,它是免费的。 在...
Webots初学者入门教程--3D视窗


Webots Tutorial 1 Your first simulation in webots Create a new world World:定义了仿真的环境,提供各个obj的位置信息,交互方式,基础物理属性等内容,文件后缀名为.wbt,文件内使用可读的VRML97语言。...
在对Epuck2机器人进行完固件更新及IP地址查询后,接下来通过ROS来对Epuck2机器人进行运动控制。以上就是Epuck2 在 ROS 下的运动控制,本文仅仅简单介绍了Epuck2的简单控制,后面想办法将编队算法应用在Epuck2机器人...
推荐文章
- centos7初始化mysql 5.7.9(源码安装)-程序员宅基地
- undefined reference to `cvHaarDetectObjects'()(人脸检测)_cvhaardetectobjects未定义-程序员宅基地
- 如何将参数传递给批处理文件?_批处理 传递参数-程序员宅基地
- C++的一些小总结 类 静态成员变量/函数 this指针_c++ class 静态指针函数-程序员宅基地
- springboot小区物业管理系统7ffeo[独有源码]如何选择高质量的计算机毕业设计_小区物业管理系统er图-程序员宅基地
- mac-gradle的安装和配置,掌握这些知识点再也不怕面试通不过_mac gradle配置-程序员宅基地
- 2032:【例4.18】分解质因数(信奥一本通)-程序员宅基地
- html怎么设置默认状态,网页中如何设置默认图片?方式介绍-程序员宅基地
- milp的matlab的案例代码_matlab30个案例分析案例5代码-程序员宅基地
- html实现/ 简约好看、美观大方的个人导航页源码/开源个人主页html源码_个人导航html-程序员宅基地