罗技无线手柄F710绑定映射为/dev/joystick
”f710“ 的搜索结果
Logitech F710无线手柄控制ROS机器人 注:游戏手柄为罗技F710无线手柄, 系统版本:ubuntu18.04 ROS版本:Melodic 节点功能:手柄与ubuntu通讯并发布/cmd_vel话题 一、与ubuntu创建连接: 1.确保手柄接收器与电脑...
Driver Files for Xbox360_64 (suitable for Logitech F710)
罗技F710使用笔记引言新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一...
罗技手柄f710驱动软件可以在win7、win10等系统上运行安装。小编提供了罗技f710手柄驱动32位和64位安装程序。如果您的电脑中提示“罗技f710手柄驱动不存在”,可以下载安装哦!助你更好地体验f710手柄设备功能!产品...
Logitech罗技遥控器F310(F710)游戏手柄C++驱动
罗技Logetic F710 手柄 手柄正面背后上有D和X拨档,D表示Direct 模式,X表示Xbox 模式,带有陀螺仪数据,一般是游戏中手柄当做鼠标选择或进行打字用。一般遥控机器人的时候没有用到这个信息,所以直接选择D档。 ...

用ros的话题形式,通过话发布一个话题,发布游戏手柄的控制命令. 句柄一个订阅者来订阅来自JOY的按键信息: ros::Subscriber gamepadDataSub;//创建订阅者句柄,订阅来自joy的按键信息 句柄一个发布者,发布一个话题,...
罗技F710对码软件
标签: f710
罗技F710对码软件
罗技F710无线控制手柄ROS下使用说明 1.安装手柄相关的包和驱动 sudo apt-get install ros-indigo-joy(ROS相关项,Jetson TK1只安装这一个) sudo apt-get install ros-indigo-joystick-drivers rosdep install joy...
罗技游戏手柄F710协议Logitech Wireless Gamepad F710Mode DByte FrameByte 0Byte 1Byte 2Byte 3Byte 4Byte 5Byte 6Byte 7Mode XByte FrameByte 0Byte 1Byte 2Byte 3Byte 4Byte 5Byte 6,7Byte 8,9Byte 10,11Byte 12,...
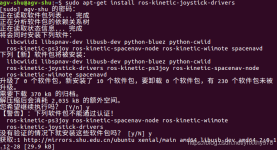
环境:ubuntu 16.04 + Ros kinetic 安装手柄驱动和包 依次输入以下命令安装 sudo apt-get install ros-kinetic-joy(直接回车,不用输入y) sudo apt-get install ros-kinetic-joystick-drivers(直接回车,不用输入y) ...
f710是一种适用于Windows和Linux操作系统的Logitech游戏手柄产品。在Ubuntu系统中使用f710手柄需要安装相应的驱动程序。对于Ubuntu 18.04及以上版本的系统,f710手柄的驱动已经内置,可以直接连接并使用。 对于...
罗技F710手柄是一款广受欢迎和使用的无线游戏手柄,适用于各种不同类型的游戏平台和设备,包括PC、Android和PlayStation 3。 要使用F710手柄,您需要正确安装和配置适当的驱动程序。以下是如何安装罗技F710手柄驱动...
1. 运行环境 操作系统: Ubuntu 14.04 ROS版本: ROS Indigo 2. 安装手柄驱动和包 依次输入以下命令安装 sudo apt-get install ros-indigo-joy(ROS相关项,Jetson TK1只安装这一个) sudo apt-get install ros-...
ubuntu 16.04 + ros kinetic 这里参考了这位博主的文章,在此... 1. 测试手柄 首先将手柄的接收器插到笔记本usb上终端运行: ls /dev/input/ 可以看到下面多了一个叫js×的家伙,我这里是js0 ...然后使用jstest 测试...
ubuntu 16.04 + ros kinetic 1. 测试手柄 首先将手柄的接收器插到笔记本usb上 ls /dev/input/ 可以看到下面多了一个叫js×的家伙,我这里是js0 ...by-id/ event10% event14% event18% event21% event6% js0% mous....
罗技游戏手柄F710的驱动程序是必需的软件,它使您能够在Windows系统上使用该手柄,并为游戏提供最佳的支持和性能。您可以从罗技官方网站或其他许可网站上下载和安装F710手柄的驱动程序。安装过程非常简单,只需按照...
参考这个博主:...下载的包改为melodic 其他大多相同。 由于是差速轮结构,只用到linear.x和anglear.z #include <ros/ros.h> #include <geometry_msgs/Twist.h>...#include &l...
在上面几篇已经详细了写到在Ubuntu 16.04 + ros kinetic中的驱动配置以及配置过程中遇到的问题; 废话不多说,在turtlebot_teleop中已有使用手柄的launch文件: logitech.launch:使用罗技的手柄控制运动 ...
罗技F710游戏手柄与计算机超过一定距离将无法完成控制, 请问,如何判断F710的通讯状态, 就是说,如果F710手柄不能连接到计算机的话,怎么在程序中判断? 是否有相关的函数库可以调用? 在XNA4.0中是否有类似的解决...
2.实验器材:罗技f710 3.操控手柄发出数据,控制小乌龟 #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <std_msgs/String.h> #include <sensor_msgs/Joy.h&g...

友链 使用windows自带的设备管理器,找到罗技F710手柄,右键更新驱动程序,然后选择手动浏览,自己选择,最后选择xbox360外设就行了
推荐文章
- android多级树形列表-程序员宅基地
- 《成为一名机器学习工程师》_成为机器学习的拉斐尔·纳达尔-程序员宅基地
- Debian11-jenkins+python+allure自动化搭建_debian11 源 tencent-程序员宅基地
- JavaScript设计模式系统讲解与应用-笔记_javascript 设计模式系统讲解与应用 课程-程序员宅基地
- sepl 3.0,全方位全能型计算机语言_sepl无人编程-程序员宅基地
- java comtext_Java中的上下文对象设计模式(Context Object Design Pattern)-程序员宅基地
- lldp中与snmp相关内容agentx-程序员宅基地
- 关闭Mysql的root用户远程访问授权报错Duplicate entry localhost-root for key PRIMARY_error 1062 (23000): duplicate entry 'localhost-roo-程序员宅基地
- LeetCode 818. Race Car-程序员宅基地
- 信息检索笔记-索引构建_为某一文档及集构件词项索引时,可使用哪些索引构建方法-程序员宅基地