
”轨迹规划“ 的搜索结果
#资源达人分享计划#
六自由度IRB2400机器人运动学分析及轨迹规划 ,陈超,李俊,以IRB2400机器人为研究对象,采用D-H坐标变换法建立机器人的坐标连杆系,完成机器人正运动学和逆运动学分析,在此基础上采用三次多�
#资源达人分享计划#
#资源达人分享计划#
Matlab井下搬运机械手的设计与轨迹规划研究 Matlab井下搬运机械手的设计与轨迹规划研究 Matlab井下搬运机械手的设计与轨迹规划研究 Matlab井下搬运机械手的设计与轨迹规划研究 Matlab井下搬运机械手的设计与轨迹规划...
轨迹规划研究、工作空间分析、3_PSS并联机器人
针对机器人轨迹笛卡尔空间规划中需要精确规划出机器人路径曲线,且在需要精确跟踪轨迹场合却有很多曲线往往达不到精度要求的问题,利用改进性遗传算法,分段跟踪Bezier曲线的各部分,使机器人运行平稳,路径圆滑平顺。...
#资源达人分享计划#
自适应分区域多样式轨迹规划算法研究,李万军,,提出了一种自适应划分区域,并生成较为合理的多样式连续轨迹的刀路规划算法。根据曲率特征将曲面划分为若干个区域。引入权因子函
机器人运动学和动力学模型,六自由度的,界面设计以及轨迹规划等功能
点到点的轨迹规划,输入位置,初始速度,初始加速度,生成运动轨迹。
1. 轨迹规划是什么?在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划。运动规划一般又分为两步: 路径规划:在地图(栅格地图、四\八叉树、RRT地图等)中搜索一条从A点到B点的路径,由一系列...
PUMA-560轨迹规划:应用matlab机器人工具箱进行末端执行器的轨迹规划(迭代法计算inverse kinematics),以及末端执行器定向,匀速运动的轨迹规划(cartesian space插值)
机器人化钻锚车钻臂工作空间分析及轨迹规划.pdf

基于双维度搜索的地下自主铲运机最优转弯轨迹规划.docx
关节空间规划规划matlab代码MATLAB 运动学 使用 Matlab 的课程代码 Robotics MSc 课程。 LynxmotionAL5D 运动学的模拟。 代码规范如下。 “masin”发布的代码仅用于教育和专业组合目的。 任何抄袭都不会被容忍。 A. ...

【 【2018.04.19ROS机器⼈操作系统】机器⼈控制:运动规划、路 机器⼈操作系统】机器⼈控制:运动规划、路 径规划及轨迹规划简介之⼀ 径规划及轨迹规划简介之⼀ 参考资料及致谢 本⽂的绝⼤部分内容转载⾃以下⼏篇⽂...
#资源达人分享计划#
#资源达人分享计划#
#资源达人分享计划#

#资源达人分享计划#
#资源达人分享计划#
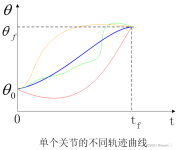
机器人-关节空间轨迹规划.pdf
标签: 文档资料
机器⼈-关节空间轨迹规划 机器⼈⼯作时,已知机器⼈各关节的初始位置便可以根据机器⼈的正运动⽅程求解出机器⼈末端的末端位姿。知道到机器⼈末端执⾏器的初 始位姿和末端位姿就可以规划出机器⼈从初始位姿到达期望...
推荐文章
- YOLO V8车辆行人识别_yolov8 无法识别路边行人-程序员宅基地
- jpa mysql分页_Spring Boot之JPA分页-程序员宅基地
- win10打印图片中间空白以及选择打印机预览重启_win10更新后打印图片中间空白-程序员宅基地
- 【加密】SHA256加盐加密_sha256随机盐加密-程序员宅基地
- cordys 启动流程_cordys服务重启-程序员宅基地
- net中 DLL、GAC-程序员宅基地
- (一看就会)Visual Studio设置字体大小_visual studio怎么调整字体大小-程序员宅基地
- Linux中如何读写硬盘(或Virtual Disk)上指定物理扇区_dd写入确定扇区-程序员宅基地
- python【力扣LeetCode算法题库】面试题 17.16- 按摩师(DP)_一个有名的讲师,预约一小时为单位,每次预约服务之间要有休息时间,给定一个预约请-程序员宅基地
- 进制的转换技巧_10111100b转换为十进制-程序员宅基地