机器人可以基于码盘数据和底盘运动学模型进行航迹推演,得到机器人的轨迹,但实际轨迹与推演轨迹存在误差,分析原因如下: 底盘实际尺寸与理论模型存在偏差,如轮子半径,两轮间距等; 底盘在运动过程中打滑或路面...
”轨迹推算“ 的搜索结果
针对掘进机截割部易损坏的问题,分析了纵轴式悬臂掘进机截割部的构造,对截割头进行了运动学分析,简化了其运动轨迹,另外对悬臂摆动机构进行了运动分析。对截割头在工作状态时进行了动态特性分析,特别分析了摆动力和...
【代码】ClickHouse嵌套类型使用案例:使用Array和Tuple(或Nested)表示交通干线指标场景
关键词:houdini,粒子,motionblur,运动模糊,轨迹,弧形,曲线,渲染(该方法与所用渲染器无关) 一般粒子渲染运动模糊常见问题: 1.解算粒子直接渲染(不存盘)可以形成运动的弧度轨迹模糊(有substep),但是...
3D视觉工坊学习交流群1、前言可能因为进入了新学期,本人遇到了几次身边小学弟和网友的提问:机器人学和SLAM该怎么入门好?由于回答了几次问题,就借着这个机会把问题的回答整理归纳下。这篇分享仅是根据本人入门...
...因为技术限制,传统的GPS卫星定位只有室外的空旷地区才能够准确定位,对于室内环境来说,GPS定位往往会因“搜星”失败而无法定位。正因为GPS定位的天然缺陷,基于手机基站的定位技术正在蓬勃发展。...
SDP4摄动模型使用示例,使用了norad库,VC2017,对话框界面, 示例使用了北斗的TLE数据,推算未来的星下点轨迹
<!--v/:* {behavior:url(#default#VML);}o/:* {behavior:url(#default#VML);}w/:* {behavior:url(#default#VML);}.shape {behavior:url(#default#VML);}--> <!-- /* Style Definitions */ table.MsoNormalTab
行程码是怎么知道你去过哪些地方的呢?
标签: 运维

前言 我在哪?是LBS领域首先要解决的问题。因为技术限制,传统的...然而因为基站的覆盖范围大,很难以取得高精度的效果,本文利用基站轨迹,提出了一个提高基站定位精度的方法。 关键字:基站定位,轨迹定位,Vit...


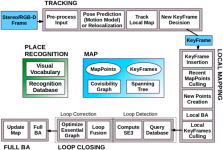
ORB-SLAM2代码/流程详解
标签: 自动驾驶


最近需要做一东西,在不借助GPS以及地图的情况下实现相对定位并画出轨迹。给定出发点为参考点,利用手机自带的加速度传感器、地磁传感器、方位传感器、陀螺仪等传感器,对行人航迹进行记录,并画出行进轨迹,难点...
圆周率的算法 古人计算圆周率,一般是用割圆法。即用圆的内接或外切正多边形来逼近圆的周长。Archimedes用正96边形得到圆周率小数点后3位的精度;刘徽用正3072边形得到5位精度;LudolphVanCeulen用正262边形得到了35...

Apollo planning TrajectoryStitcher



作者丨Jasper@知乎编辑丨Realcat 计算机视觉SLAM“近年来深度学习被广泛应用于定位与建图中。相比于传统的手动建模方法,深度学习提供了一种数据驱动的解决方案,并逐步发展成一个...
摘要:室内定位是指当人或者物体在室内时,获取其位置信息的定位技术。由于GPS(Global Positioning ...目前,可用于室内定位的技术有很多,包括RFID、蓝牙、红外、UWB、ZigBee、WiFi和行人航迹推算PDR(Pedestrian De...
用c++根据轨道六根数计算卫星位置
标签: 算法
轨道六根数是描述卫星轨道的一组参数,包括: 轨道长半径(a):卫星轨道的半径,表示卫星到地球中心的平均距离。 轨道偏心率(e):卫星轨道的偏心率,表示轨道的椭圆程度。 轨道倾角(i):卫星轨道与地球赤道面的...
java中经纬度使用与相关工具类
标签: java

无人驾驶的规划-基础概念
标签: 自动驾驶

九宫按洛书排布,飞星轨迹由中宫作出发点,然后按照洛书数序飞移,所以,飞星轨迹又称洛书轨迹(洛书步法)。顺飞:数字由小到大排列。逆飞:数字由大到小排列。顺逆飞排列顺序,按洛书由中一乾一兑一良一离一坎一坤一...
推荐文章
- Pytorch Dataloader 模块源码分析(二):Sampler / Fetcher 组件及 Dataloader 核心代码-程序员宅基地
- Asp类型判断及数组打印-程序员宅基地
- Adroid Studio 2022.3.1 版本配置greendao提示无法找到_plugin with id 'org.greenrobot.greendao' not found-程序员宅基地
- esxi查看许可过期_解决Vsphere Client 60天过期问题-程序员宅基地
- CMake_cmake_module_path-程序员宅基地
- 生产者消费者模型-程序员宅基地
- Adaptive AUTOSAR 解决方案 INTEWORK-EAS-AP_autosar的eas-程序员宅基地
- 穿山甲SDK错误码40025_穿山甲sdk错误码4025-程序员宅基地
- css firefox下的兼容问题_css 只用于firefox-程序员宅基地
- 【Python】对大数质因数分解的算法问题_python分解多个质因数代码-程序员宅基地