行人航位推算是通过对行人的位移、速度和方向进行估算,进而预测行人未来的位置和行动轨迹,可以用于智能交通系统、机器人导航等领域中。 在matlab中实现行人航位推算,需要进行如下步骤: 1. 收集数据:获取行人...
”轨迹推算“ 的搜索结果
路网数据对于城市中的很多应用,比如车载导航和线路优化等,都非常重要。传统的道路数据采集方法依赖于采集车,消耗大量的人力物力。随着GPS设备的普及,海量轨迹数据在城市里产生,使我们能够用轨...
航迹推算就是利用里程计数据推算机器人在空间中的移动轨迹。 以下是一个基于 Python 的简单里程计航迹推算代码示例: ```python import math # 定义机器人初始位置和方向 x = 0 y = 0 theta = 0 # 定义轮子半径...
机器人定位轨迹闭合算法推荐
标签: 有问必答
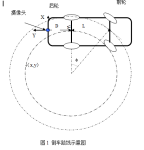
具体问题: 如下图,在无RTK的情况下,odom+imu的推算轨迹,和实际轨迹有偏差,我们希望,在重新恢复RTK后,能够修正推算的轨迹,至少使整个轨迹是连续的。没有断开。想请教下有没有什么好的算法推荐下呢? 可获得...
行人航迹推算是对行人运动轨迹的预测和推算,可以应用于交通流量监测、安保等领域。目前主要有三种方法可用于行人航迹推算:基于邻域的方法、基于运动模型的方法和基于机器学习的方法。 基于邻域的方法是指通过行人...
2、路径的空间属性,轨迹的时间属性 路径:空间一初始点位姿到目标点位姿的一个图形 轨迹: 具有特定时间属性的一条路径,每个时间分量上对应不同的位姿。(时间序列)3、轨迹平滑--上面参考中也有--多重分割轨迹规划...

有帮助的小伙伴可以帮我点个免费的好评和赞耶谢谢大家! 第1关:数据清洗: importorg.apache.spark.sql.SparkSession objectStep1{ ...defmain(args:Array[String]):Unit={ ...valspark=SparkSession.builder()....
因此,通过测量航向角的变化量,可以推算出机器人绕轨迹圆心旋转的角度,从而得到机器人的航迹。 #### 引用[.reference_title] - *1* *2* [自动驾驶(五十七)---------车身航迹推算]...

前言 PDR的应用基础是基于RSSI的室内定位,进行室内导航与航迹规划。 室内定位相关知识 惯性导航概述 惯性导航是一种不借助外力(接收本体之外的信号)的自主性导航,你只要知道自己的初始位置,知道自己的...

1. 设计背景与目的交通调查的主要内容包括出行起讫点调查(OD调查)、交通量与交通设施调查、道路通行能力调查等,而进行交通调查需要耗费大量的人力物力,调查过程中各种不确定因素将直接影响调查结果的可信度,所...


双轮差速模型和航迹推算
标签: slam
转载:添加链接描述
预测轨迹是指根据过去的测量结果和系统模型,使用卡尔曼滤波算法来推算未来一段时间内的系统状态变化情况。在这个过程中,预测轨迹不仅依赖于系统的初始状态和测量的结果,还考虑了测量误差和系统模型的不确定性。 ...
奥雷基特 精确高效的核心层,适用于太空飞行动力学应用 是用Java编写的低级空间动力学库。 从快速研究到关键操作,Orekit的设计易于在非常不同的环境中使用。 作为一个库,Orekit提供了基本元素(轨道,日期,姿态,...
例如,可以使用物体运动学公式和航迹推算方法来计算无人艇的位置和速度。然后,可以使用图形绘制函数,如plot或scatter,将计算得到的轨迹点显示在一个二维或三维的坐标系中。 此外,MATLAB还提供了一些专门用于...
随着定位技术的发展以及IOT设备的普及,大量的轨迹数据可以被采集分析。轨迹数据一般被表示成位置与其采集时间的序列。了解轨迹之间的相似度,有非常多的应用,例如:密切接触者追踪,伴侣检测,个性化推荐等。然而...
路径规划算法介绍1 DWA算法 1 DWA算法 链接参考其包含matlab相关程序 ...2)基于该不同的速度与角速度模拟产生一系列轨迹,此为一系列的模拟轨迹 3)对该模拟的轨迹基于评价函数进行评价 评价参数有

IMU惯性导航
标签: matlab 惯导 轨迹
matlab绘制物体的运动轨迹,有采样例子可直接使用。

在轨迹解算中,IMU扮演着至关重要的角色,通过对加速度和角速度的测量,可以推算出物体在空间中的运动轨迹和姿态变化,为导航和定位提供必要的数据支持。 1.2 IMU轨迹解算的基本原理 IMU轨迹解算的基本原理是利用...
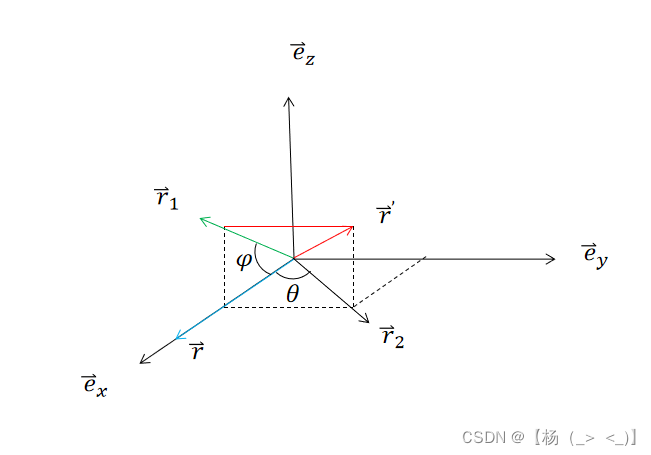
旋转矩阵--R--一个3*3的矩阵,其每列的值时B坐标系在A坐标系上的投影值。代表B坐标系相对于A坐标系的姿态。
使用PMSM控制的puma560机械臂简单轨迹跟踪前言1. PMSM部分1.1 数学模型1.2 控制方法PI参数整定电流环转速环仿真机械臂部分运动学正运动学逆运动学动力学轨迹规划控制方法 前言 最近在忙读研和课内项目的东西,因此有...
除此之外,tlrslk小车还可以使用惯性测量单元(IMU)来记录车辆的加速度、角速度和方向等信息,从而推算出车辆的位置和轨迹。总之,tlrslk小车可以根据需求选择不同的传感器来记录轨迹,进而实现自主导航和路径规划...
推荐文章
- YOLOv7如何提高目标检测的速度和精度,基于优化算法提高目标检测速度-程序员宅基地
- linux中进程退出函数:exit()和_exit()的区别_linux结束进程可以用哪些函数,它们之间有何区别?-程序员宅基地
- sqlserver55555_sqlserver把小数点后面多余的0去掉-程序员宅基地
- Angular6 和 RXJS6 的一些改动_angular6,requestoptions改成了什么-程序员宅基地
- C++解析XML文件_c++ xml解析-程序员宅基地
- R语言使用caret包的train函数构建多元自适应回归样条(MARS)模型构建分类模型、trainControl函数设置交叉验证参数、自定义调优评估指标_多元自适应回归样条 r-程序员宅基地
- Android ListView控件显示数据库中图片_安卓获取listview里的图片并显示-程序员宅基地
- python123程序改错题库,2016最新二级C语言考试题库及答案(程序改错专项练习 精华版)...-程序员宅基地
- Roser S.Pressman在UMLChina交流实录-程序员宅基地
- 【Linux】shell编程1(shell脚本书写格式、脚本中的环境变量、普通变量、自定义环境变量、变量数组、位置变量、状态变量、内置变量、变量扩展)_linux脚本格式-程序员宅基地