”视觉里程计“ 的搜索结果

该库是基于仔细的特征选择和跟踪的立体里程计的 MATLAB 实现。 该代码已经在MATLAB R2018a上测试过,并且依赖于以下工具箱: 并行处理工具箱 计算机视觉工具箱 在带有Intel(R) Core(TM) i7-8750H CPU @ 2.20GHz和...
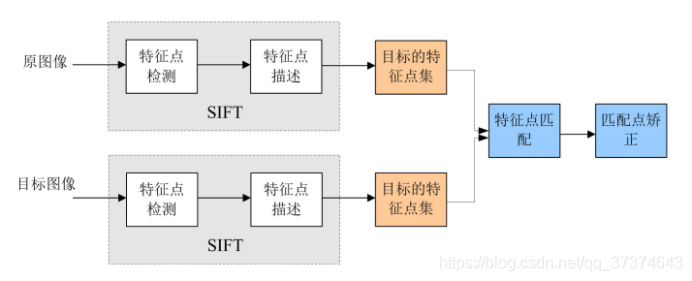
通过对特征点提取与匹配、运动估计与位姿计算等原理的深入探究,我们了解了视觉里程计的基本原理和常见的计算方法。视觉里程计(Visual Odometry)是计算机视觉领域中的重要研究方向,它通过对图像序列进行处理和...

相机模型是理解视觉里程计之前的基础。如果说特征点法关注的是,那么,直接法关注的则是。特征点法通常会把图像抽象成特征点的集合,然后去缩小特征点之间的重投影误差;而直接法则通过warp function直接计算像素点...
针对传统视觉里程计方法在动态环境中跟踪效果差、容易失效的问题,提出了一种适用于动态场景下融合语义的半直接法视觉里程计,主要由语义分割、位姿跟踪和地图管理三部分组成。首先,使用语义分割网络Mask R-CNN对每...
1.概念:什么是里程计?在里程计问题中,我们希望测量一个运动物体的轨迹。这可以通过许多不同的手段来实现。例如,我们在汽车轮胎上安装计数码盘,就可以得到轮胎转动的距离,从而得到汽车的估计。或者,也可以测量...

资源名:imu_视觉里程计_kalman滤波器_matlab 资源类型:matlab项目全套源码 源码说明: 全部项目源码都是经过测试校正后百分百成功运行的,如果您下载后不能运行可联系我进行指导或者更换。 适合人群:新手及有一定...
SLAM _ 视觉SLAM中的前端:视觉里程计与回环检测 另外,还包含以下资料的获取: 涵盖感知,规划和控制,ADAS,传感器; 1. apollo相关的技术教程和文档; 2. adas(高级辅助驾驶)算法设计(例如AEB,ACC,LKA等) 3....
为了解决地下工程场景下巡逻机器人的定位与建图问题, 提出了一种基于点线特征融合的半直接单目视觉里程计(SVO)算法。本文算法可分为特征提取、状态估计和深度滤波器3个线程。特征提取线程负责图像点、线特征的提取;...
视觉slam十四讲 高清pdf资源 目前只有视觉里程计部分 如果,专研slam vio部分的可以作为必备资料
针对传统视觉里程计在低纹理场景下,定位精度差甚至失效的问题,提出一种结合点线特征的RGB-D视觉里程计方法。该方法结合了点线特征各自独有的特性,同时联合点特征的光度误差和线特征的局部梯度适应性误差,构建了一个...
支持GNSS/INS松组合解算 支持GNSS/INS/Camera融合解算 支持纯惯导推算 支持VIO解算,不过需要利用GNSS数据进行全局的初始化
视觉里程表 这是在上的OpenCV 3.4实现。 方法 2D-2D单眼VO和2D-3D立体声VO 实施细节 编译 在2目录中: mkdir build cd build cmake .. make 跑步 编译后,直接在构建中单核细胞增多症 ./vo [sequence ID] [dataset ...

视觉里程计是通过视觉信息...首先介绍了常用的两种视觉里程计即单目视觉里程计和立体视觉里程计, 然后从鲁棒性、实时性和精确性三个方面详细讨论了视觉里程计技术的研究现状, 最后对视觉里程计的发展趋势进行了展望。
一个简单的orb视觉里程计工程
标签: slam
使用win10,vs2017结合slam14将于orb-slam2实现一个简单的orb视觉里程计
移动机器人视觉里程计综述.pdf
基于深度学习的智能车辆视觉里程计技术发展综述.pdf
#资源达人分享计划#
一种融合点线特征的视觉里程计架构设计与定位实现
mono-vo, 基于OpenCV的单目视觉里程计实现 这是基于 OpenCV 3.0的单目视觉里程计算法的实现。算法使用5 个nister点算法,用于基本矩阵估计和快速特征,具有一个,跟踪器。 更详细的细节是,这里的作为一个报告,这里...


使用深度递归卷积神经网络(RCNNG),提出了一种新颖的端到端单目VO的框架。由于它是以端到端的方式进行训练和配置的,因此它可以直接从一系列原始的RGB图像(视频)中计算得到姿态,而无需采用任何传统VO框架中的模块...


基于C++语言,建立工程文件,编写SLAM视觉里程计高端代码
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地