声明一个用与 IMU积分的类 ,来实现 短时间内的航迹推算。更新时间,用于判断下一帧数据,在时间间隔上是否满足要求。所以需要在IMU的回调函数里面,赋值上面的结构体数据。然后将数据加入,在该函数内部,即完成...
”航迹推算“ 的搜索结果
针对室内定位的实际应用需求,提出了基于行人航迹推算算法(PDR)的适用于手机采集数据的室内定位方法。不同于传统的数据采集方法,该种定位方法利用手机得到加速度、陀螺仪以及地磁原始数据,通过分析加速度信号实现...
Wheel-IMU跟随车轮不断旋转,安装方式和imu坐标系定义不同,在算法中的处理方式也不同。基于旋转效应对捷联惯导误差的调制作用,充分挖掘Wheel-IMU的定位能力。基于陀螺间接测量得到的车轮速度,进一步探讨由车轮...
这篇教程主要是测量机器人的里程计误差的,让机器人重复的走固定的路线,在这里我让机器人走正方形,比较机器人的起始位置(理想状态是重合的) 以及 局部里程计(机器人自身测算得)和全局里程计的的位置(定位系统...

针对同一轨道上列车防撞预警,采用GPS卫星定位和航迹推算实现组合定位,通过无线数传技术,可用于复杂轨道地理环境(隧道、森林、丘陵等)下的局域铁路网行车安全管理。实验测试表明系统能够满足应用要求。
基于超声波与航迹推算的扫地机器人室内定位方案_黄胜林.caj
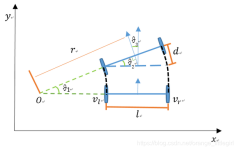
里程计模型&航迹推算
标签: slam

\quad连续时间内的 IMU 运动学方程: R˙=Rω∧q=12qω˙p˙=vv˙=a \dot{\mathbf{R}}=\mathbf{R}\omega ^{\wedge} \\ \dot{\mathbf{q}=\frac{1}{2}\mathbf{q}\omega}\\ \dot{\mathbf{p}}=v \\ ...
对惯性传感器的数据进行处理,结合行人航迹推算方法得到路径
针对RSSI指纹膜定位方法受矿井环境影响较大,而基于航迹推算的定位方法易形成误差累积的问题,设计了基于指纹膜与航迹推算的井下人员定位系统。该系统周期性采集人员的位置信息与运动姿态信息,利用K近邻和峰值检测方法...
针对同一轨道上列车防撞预警,采用GPS卫星定位和航迹推算实现组合定位,通过无线数传技术,可用于复杂轨道地理环境(隧道、森林、丘陵等)下的局域铁路网行车安全管理。实验测试表明系统能够满足应用要求。
电信设备-基于直行路口检测的移动机器人航迹推算修正系统及方法.zip
行人航迹推算(pedestrian dead reckoning, PDR)作为一种新兴的导航定位方法, 因 其不易受外界环境因素影响而受到广泛关注. 针对室内行人航迹推算, 采集并分析了微机电 惯性测量单元(micro-electro-mechanical system...
行走航迹推算技术的研究,裘昕,朱林,行走航迹推算技术(PDR)为一种辅助定位方式,因其受环境影响小而成为目前常用的定位技术之一,但是由于该技术的误差会随时间的增加而
航迹推算就是利用里程计数据推算机器人在空间中的移动轨迹。 以下是一个基于 Python 的简单里程计航迹推算代码示例: ```python import math # 定义机器人初始位置和方向 x = 0 y = 0 theta = 0 # 定义轮子半径...
行人航迹推算是对行人运动轨迹的预测和推算,可以应用于交通流量监测、安保等领域。目前主要有三种方法可用于行人航迹推算:基于邻域的方法、基于运动模型的方法和基于机器学习的方法。 基于邻域的方法是指通过行人...
DR航位推算Matlab代码+数据(前向速度 右向速度 航向角 地球模型)
- *1* *2* [自动驾驶(五十七)---------车身航迹推算](https://blog.csdn.net/zhouyy858/article/details/103444583)[target="_blank" data-report-click={"spm":"1018.2226.3001.9630","extra":{"utm_source":"vip...
Levi和Judd在1996年提出了行人航迹推算算法。这个算法是用于预测和推算行人在特定场景中的移动路径和行为的一种方法。行人航迹推算算法基于行人的观测数据,通过分析和建模行人的运动模式和行为特征,来推断他们的...
航迹相关算法matlab代码programming_notes 面向ISTD学生的入门包 目录: 学习计算机科学的内容。 供计算机科学家学习和获取更新的平台。 如何从头开始学习计算机科学。 以及在ISTD中学习每个曲目的知识。 这是关于...
针对RSSI指纹膜定位方法受矿井环境影响较大,而基于航迹推算的定位方法易形成误差累积的问题,设计了基于指纹膜与航迹推算的井下人员定位系统。该系统周期性采集人员的位置信息与运动姿态信息,利用K近邻和峰值检测方法...
行人航迹推算(pedestrian dead reckoning, PDR)作为一种新兴的导航定位方法, 因 其不易受外界环境因素影响而受到广泛关注. 针对室内行人航迹推算, 采集并分析了微机电 惯性测量单元(micro-electro-mechanical system...


通过读取传感器的数据,进行航位推算。 通过simlink生成加速度计,陀螺仪和里程计的数据。再用最小二乘法确认传感器数据融合的的权重。 有什么具体的学习资料或者代码推荐吗?</p>
双轮差速模型和航迹推算
标签: slam
转载:添加链接描述
推荐文章
- YOLOv7如何提高目标检测的速度和精度,基于优化算法提高目标检测速度-程序员宅基地
- linux中进程退出函数:exit()和_exit()的区别_linux结束进程可以用哪些函数,它们之间有何区别?-程序员宅基地
- sqlserver55555_sqlserver把小数点后面多余的0去掉-程序员宅基地
- Angular6 和 RXJS6 的一些改动_angular6,requestoptions改成了什么-程序员宅基地
- C++解析XML文件_c++ xml解析-程序员宅基地
- R语言使用caret包的train函数构建多元自适应回归样条(MARS)模型构建分类模型、trainControl函数设置交叉验证参数、自定义调优评估指标_多元自适应回归样条 r-程序员宅基地
- Android ListView控件显示数据库中图片_安卓获取listview里的图片并显示-程序员宅基地
- python123程序改错题库,2016最新二级C语言考试题库及答案(程序改错专项练习 精华版)...-程序员宅基地
- Roser S.Pressman在UMLChina交流实录-程序员宅基地
- 【Linux】shell编程1(shell脚本书写格式、脚本中的环境变量、普通变量、自定义环境变量、变量数组、位置变量、状态变量、内置变量、变量扩展)_linux脚本格式-程序员宅基地