自动驾驶汽车的发展已经见证了硬件传感器记录感官数据的容量和准确度的发展。传感器的数量增加了,新一代传感器正在记录更高的分辨率和更准确的测量结果。 在本文中,我们将探讨传感器融合如何在涉及环环相扣的数据...
”自动驾驶中的3D目标检测“ 的搜索结果
167利用深度卷积神经网络增强基于层的目标检测.pdf 168异常确定系统及其确定方法.pdf 169自动车辆检测和对产量情景的响应.pdf 16当车辆以自主模式操作时,停用或禁用各种车辆系统和或部件.pdf 170车辆的用户配置文件...


双阶段目标检测算法与单阶段目标检测算法在工作原理和性能方面存在一些相似与差异之处。

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达文章导读 本文是一篇将注意力机制应用在点云目标检测中的文章《TANet: Robust 3D Object Detection fro...




大牛讲堂 | 基于DenesBox的目标检测在自动驾驶中的应用 前言 CNN(convolutional neural network)在目标检测中大放异彩,R-CNN系列,YOLO,SSD各类优秀的方法层出不穷。在2D图像的目标检测上,...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达文章:An Overview Of 3D Object Detection作者:Yilin Wang Jiayi Ye翻译:分享者...
D4LCN: Learning Depth-Guided Convolutions for Monocular 3D Object Detection (CVPR2020) 基于深度引导卷积的单目3D目标检测 1. 论文简介 (1)简介 单目3D目标检测最大的挑战在于没法得到精确的深度信息,传统的...
目标检测是计算机视觉领域中的一项任务,旨在自动识别和定位图像或视频中的特定目标,目标可以是人、车辆、动物、物体等。目标检测的目标是从输入图像中确定目标的位置,并使用边界框将其标记出来。

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达一、SA-SSD在bird's eye view任务中,效率与精度并存的SA-SSD论文:http://www4.comp....
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达这是一篇由地平线机器人发表在CVPR2020 Workshop的文章,主要是将Anchor Free的思想应用于3D目标检测领域。同...

《Frustum PointNets for 3D Object Detection from RGB-D Data》论文笔记一、论文思路二、模型介绍2.1 模型结构2.2 实现细节2.2.1 Frustum Proposal2.2.2 3D Instance Segmentation2.2.3 Amodal 3D Box Estimation...
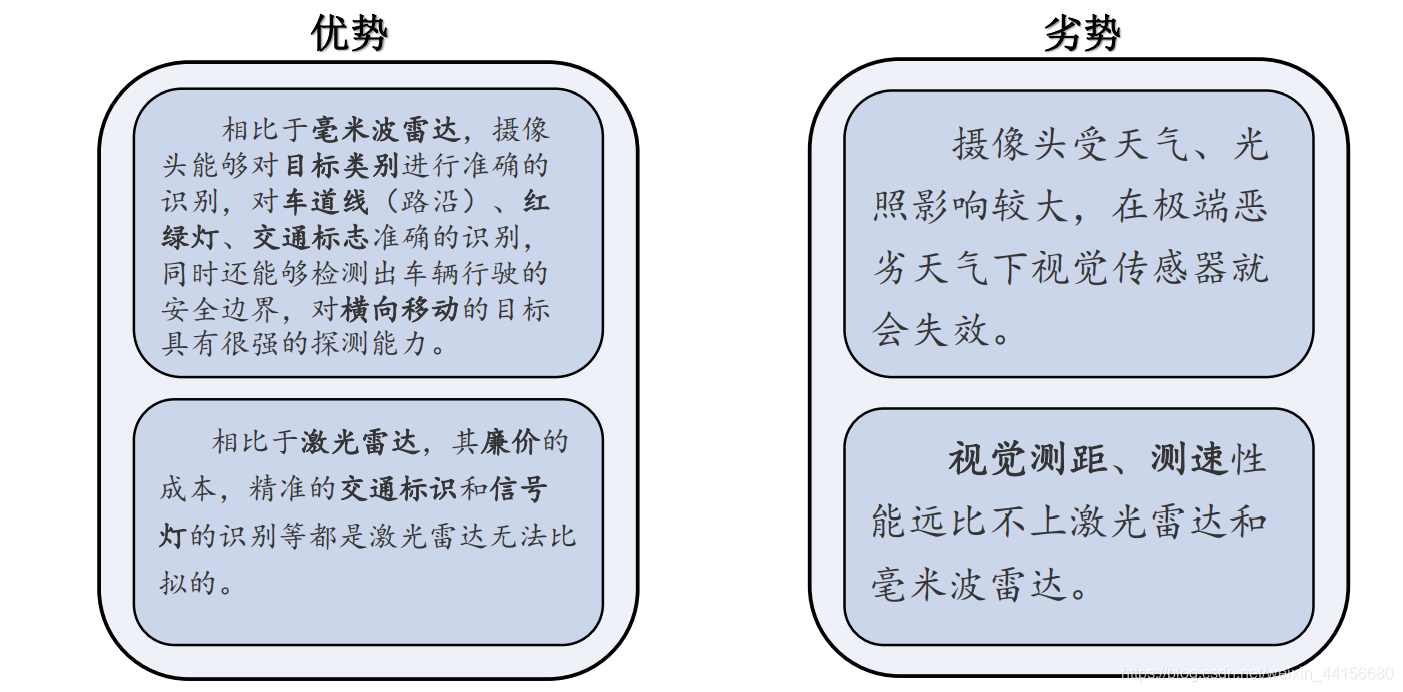
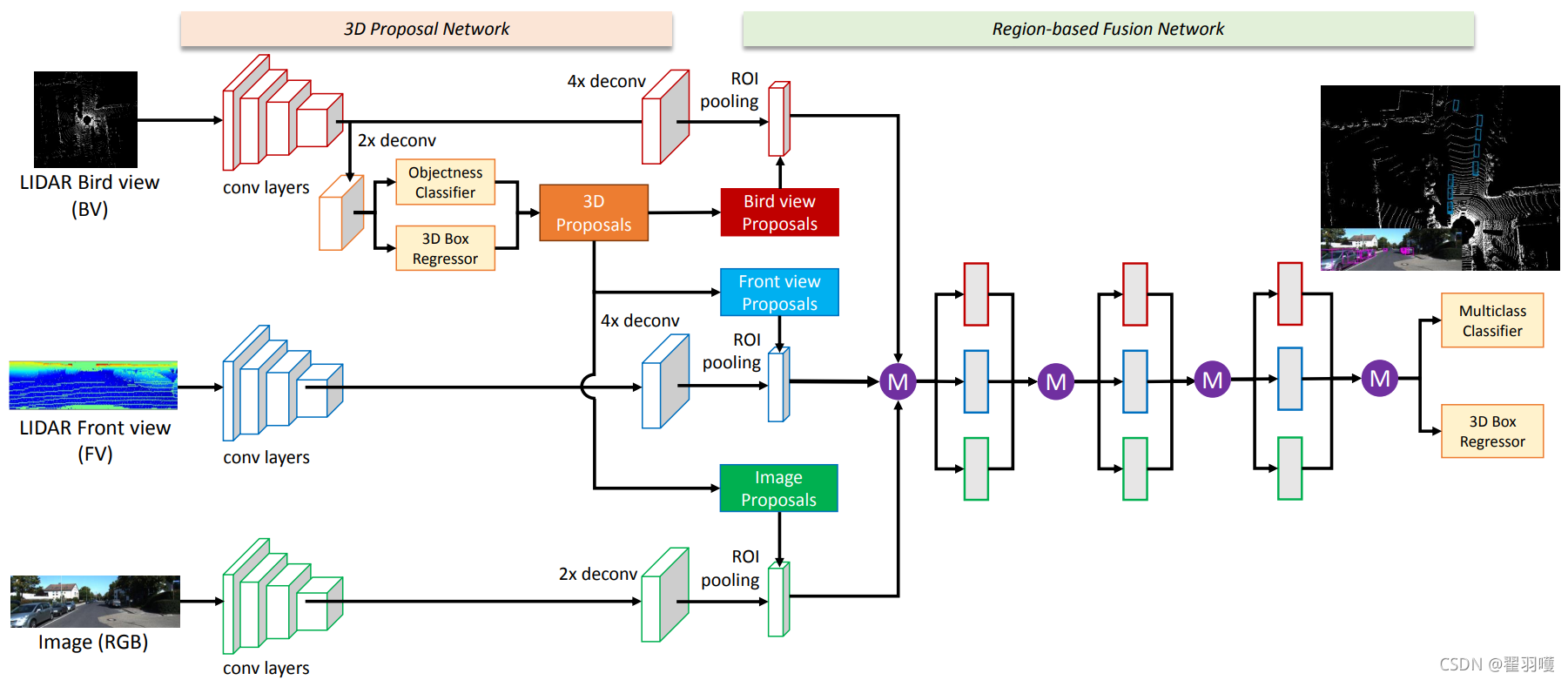
无人驾驶视觉感知异同点介绍 3D障碍物技术 理论技术分析 代码 结论 小结 参考


PETR摒弃了采样和投影,...(3) 复杂的特征采样过程将阻碍检测器的实际应用,在没有在线 2D 到 3D 转换和特征采样的情况下构建端到端 3D 对象检测框架,由于需要采样和投影,架构中的pipeline相对复杂,影响推理的效率。




推荐文章
- 阿里云企业邮箱的stmp服务器地址_阿里云stmp地址-程序员宅基地
- c++ 判断数学表达式有效性_高考数学大题如何"保分"?学霸教你六大绝招!...-程序员宅基地
- 处理office365登录出现服务器问题_o365登陆显示网络异常-程序员宅基地
- Nginx RTMP源码分析--ngx_rtmp_live_module源码分析之添加stream_ngx_rtmp_live_module 原理-程序员宅基地
- 基于Ansible+Python开发运维巡检工具_automation_inspector.tar.gz-程序员宅基地
- Linux Shell - if 语句和判断表达式_shell if elif-程序员宅基地
- python升序和降序排序_Python排序列表数组方法–通过示例解释升序和降序-程序员宅基地
- jenkins 构建前执行shell_Jenkins – 在构建之前执行脚本,然后让用户确认构建-程序员宅基地
- 如何完全卸载MySQL_mysql怎么卸载干净-程序员宅基地
- AndroidO Treble架构下HIDL服务查询过程_found dead hwbinder service-程序员宅基地