多传感器融合新方案,大幅度提升3D目标检测性能
”自动驾驶中的3D目标检测“ 的搜索结果

本文充分利用立体图像中的稀疏、密集、语义和几何信息,提出了一种用于自动驾驶的三维目标检测方法。我们的方法,称为 Stereo R-CNN,扩展了 Faster R-CNN 用于立体输入,以同时检测和关联左右图像中的目标。我们在...
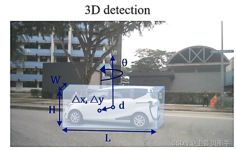
随着计算机视觉技术的不断发展,3D目标检测成为了一个备受...与传统的2D目标检测相比,3D目标检测可以在三维空间中对物体进行定位和识别,具有更高的准确性和适用性。本文将介绍3D目标检测的相关概念、方法和代码实现。

本文综合整理单目3D目标检测的方法模型,包括:基于几何约束的直接回归方法,基于深度信息的方法,基于点云信息的方法。万字长文,慢慢阅读~ 直接回归方法涉及到模型包括:MonoCon、MonoDLE、MonoFlex、CUPNet、...
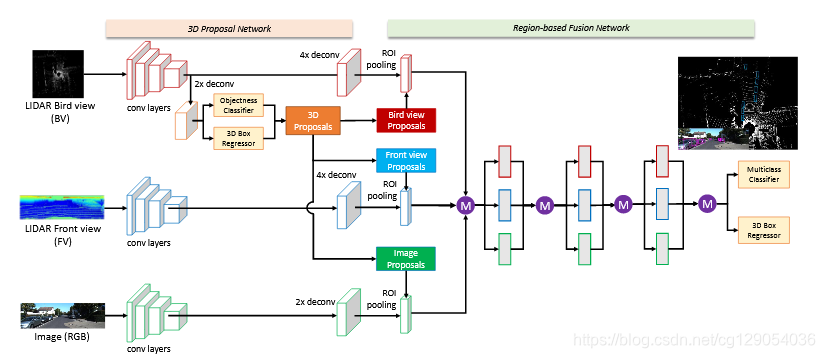
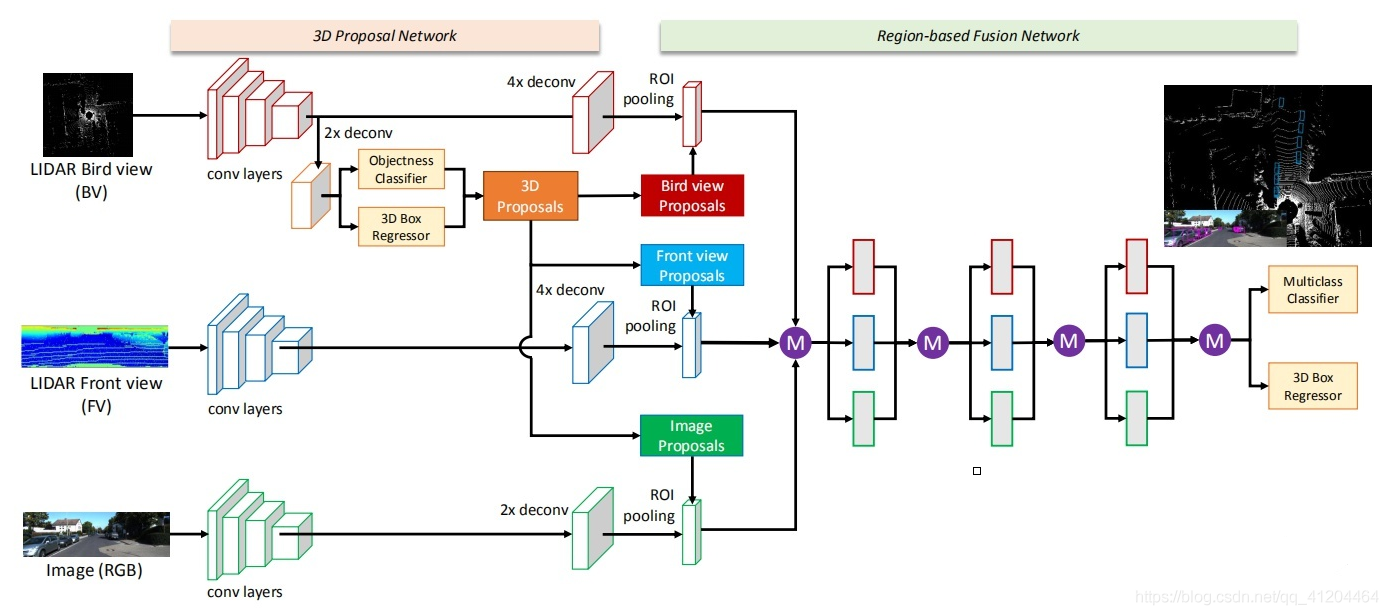
点击下方卡片,关注“自动驾驶之心”公众号ADAS巨卷...具体来说,3D目标检测是一个至关重要的功能模块,因为它可以同时预测周围物体的类别、位置和大小。一般来说,自动驾驶汽车配备了多个传感器,包括摄像头和激...



本文共4593字,预计需要20分钟,可以先收藏再看哦1 简介目标检测是计算机视觉领域的传统任务,与图像识别不同,目标检测不仅需要识别出图像上存在的物体,给出对应的类别,还需要将该物体的位置通过最小包围框...
自动驾驶汽车的视觉感知系统在很大程度上依赖于3D目标检测。3D数据是在另一个层面上理解世界的关键,但不幸的是,这并不容易获得。第三个维度可以以更人性化的方式理解世界,或者更好的3D数据不是通过其RGB值来描述...

从目前的标注需求来看自动驾驶的标注需要一定是占据了标注行业的半壁江山的而从数据需求来看有是足够持续的,毕竟做自动驾驶的“金主爸爸们”都是非常富足的。 本文就继续就基于激光雷达的目标检测方法做学习。 ...
本文详细介绍KITTI数据集的坐标系统和数据格式
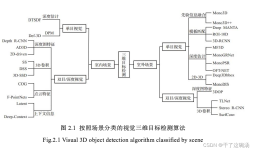
该项目主要在对近期(17年)开始的自动驾驶场景的目标检测做一个汇总,持续更新,也欢迎大家参与进来。 为了方便表示,该项目仅仅针对自动驾驶场景,分类方法按照输入进行划分,特别地,我们也对论文实验对应的论文...
自动驾驶深度多模态目标检测和语义分割:数据集、方法和挑战 原文地址:https://arxiv.org/pdf/1902.07830.pdf Deep Multi-Modal Object Detection and Semantic Segmentation for Autonomous Driving: Datasets, ...







3D目标检测是根据物体的形状、...一些常见的用途包括: 机器人技术 自动驾驶车辆 医学影像MediaPipe Objectron是由Google的MediaPipe团队开发的计算机视觉流水线,可以使用Objectron数据集实时实现3D目标检测和跟踪。
推荐文章
- 机器学习之超参数优化 - 网格优化方法(随机网格搜索)_网格搜索参数优化-程序员宅基地
- Lumina网络进入SDN市场-程序员宅基地
- python引用传递的区别_php传值引用的区别-程序员宅基地
- 《TCP/IP详解 卷2》 笔记: 简介_tcpip详解卷二有必要看吗-程序员宅基地
- 饺子播放器Jzvd使用过程中遇到的问题汇总-程序员宅基地
- python- flask current_app详解,与 current_app._get_current_object()的区别以及异步发送邮件实例-程序员宅基地
- 堪比ps的mac修图软件 Pixelmator Pro 2.0.6中文版 支持Silicon M1_pixelmator堆栈-程序员宅基地
- 「USACO2015」 最大流 - 树上差分_usaco 差分-程序员宅基地
- Leetcode #315: 计算右侧小于当前元素的个数_找元素右边比他小的数字-程序员宅基地
- HTTP图解读书笔记(第六章 HTTP首部)响应首部字段_web响应的首部内容-程序员宅基地