stm32f4编码器模式 花费一下午时间研究编码器的使用,简单总结如下 E6B2-CWZ1X编码器 stm32f407 定时器编码器模式 一、编码器简介 1、分类 编码器可按以下方式来分类。 (1)增量型: 每转过单位的角度就...
”编码器模式“ 的搜索结果

使用带编码器电机时,使用定时器编码器模式更加方便
stm32学习笔记:编码器接口
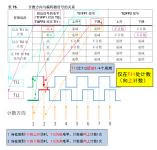
2、脉冲计数对应电机速度的数据两种处理方式(1) 定时器中断法,计算电机的圈数(过程小题大做,不推荐)前面提到了编码器的线数为1024线(编码器每转一周就会输出1024个脉冲),那么你的重装载值为(1024-1),当计...
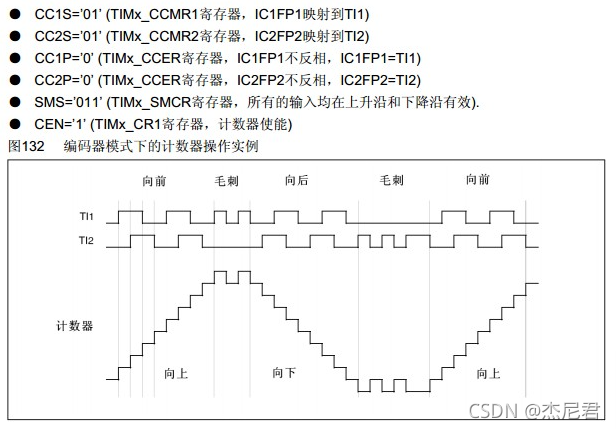
在编码器模式1下,保持计数器在向上计数模式下计数。 如果TI1/TI2需要捕获相应边沿,可自行设置,不影响编码器模式1的工作。 根据表:计数方向与编码器信号的关系,如果我们要维持计时器一直在向上模式下计数的话。...
本文主要对stm32编码器模式配置进行了详解,希望对你的学习有所帮助。
stm32f103 通过TIM4定时器的编码器模式对上位编码器输出的AB相脉冲进行读取,然后分频后输出低频的AB相脉冲。PB6、PB7为接收编码器AB相脉冲;PA3、PA4为降频后的AB相输出
本程序包为STM32F103的四个通用定时器的编码器模式配置(寄存器和库函数两个版本都有),由于TIM2和TIM5的IO重叠,这里对TIM2进行了端口重映射,两个版本的程序实测均正确。 如有疑问可发邮件:[email protected]
本问讲解了编码器测速原理及STM32编码器模式,文末有STM32编码器模式例程。
在stm32F407的基础上实现旋转编码器的控制并通过串口显示数据
提供的代码为一个使用标准外设库编写的简单Demo工程,该工程主要配置TIM的编码器模式,通过定时读取编码器的方向(DIR),和计数(CNT),并通过串口打印出来。 其中里面附带一个工程(用于模拟编码器AB相波形的工程...

STM32编码器模式的测试例程,代码中采用TIM2定时器的编码器模式,在主程序中利用延时函数监测单位时间内的脉冲数,并根据脉冲数计算速度。程序中不包含电机输出控制和PID调速。

编码器(Encoder)是一种用于测量旋转运动或位置的设备。编码器通常与定时器模块一起使用,以便在微控制器中获取和计算旋转的脉冲数量,从而确定物体的运动方向和距离。编码器在许多应用中都很有用,例如机器人运动...

使用stm32f103,用编码器模式对编码器的脉冲进行读取,并且设置了自动重载数为编码器一圈的脉冲数,使用定时器中断来计算编码器的圈数,程序即插即用,无需修改。

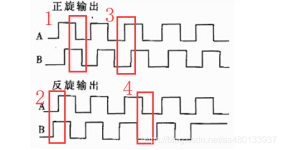
STM32 单片机可以使用定时器的四相编码器模式(X4 Encoder Mode)来实现四相编码器的接口。解释:当Tl1先产生脉冲,Tl2后产生脉冲。(A相先变化,B相后变化)时电机正转,计数器开始计数CNT++。当产生毛刺时,CNT不...

stm32-编码器模式
标签: stm 32
自己编写的stm32f103程序,程序作用是将stm32的定时器功能复用为编码器模式
用stm32TIM2的CH1和CH2通道作为编码器模式,选择编码器模式1,编码器为A相为512脉冲,dir为方向脉冲,可以实现编码器正转加数,反转减数。
基于stm32f407编码器模式,已经调试成功,程序中有代码截图。

直流电机编码器测速 定时器编码器模式测速 STM32F407 方便移植 可硬件DBUG调试

推荐文章
- 台式计算机有没有无线连接模块,台式机能不能连接wifi_台式机怎么连接wifi-程序员宅基地
- OpenGLES编程思想-程序员宅基地
- linux命令行去掉滴滴声_linux一直叮叮叮-程序员宅基地
- Java从零开始 第10.5讲 面向对象的习题课_编写一个测试类booktest,创建几个book对象,并打印它们的字符串表示,同时判断-程序员宅基地
- Spark伪分布安装(依赖Hadoop)_下载spark的hadoop依赖-程序员宅基地
- TCP/IP 是用于因特网 (Internet) 的通信协议_广泛应用在internet中的tcp/ip的网络管理主要使用的是 ____协议。 (填空题)-程序员宅基地
- java中的一些经典算法_java中temsize+=1运算-程序员宅基地
- Linux习题简答题_linux中,第一个普通用户的uid为____。-程序员宅基地
- 【路径规划】基于matlab粒子群算法新型概率密度无人机作战路径规划【含Matlab源码 2620期】_已知目标出现概率热图matlab无人机路径规划-程序员宅基地
- navicat执行.sql文件_navicat执行sql文件-程序员宅基地