关于立体匹配,我之前写了很多博客,重复去写就没有必要,学习的朋友请阅读如下链接,本文我们随便聊聊立体匹配的方法论和弱纹理恢复问题。
”立体匹配“ 的搜索结果

立体匹配是立体视觉从图像生成三维点云的常规手段。立体匹配算法主要是通过建立一个能量代价函数,通过此能量代价函数最小化来估计像素点视差值。立体匹配算法的实质就是一个最优化求解问题,通过建立合理的能量函数...
【立体视觉(五)】之立体匹配与SGM算法——立体视觉学习笔记。

立体匹配matlab
标签: matlab
立体匹配matlab (stereo matching matlab )
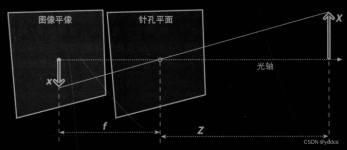
立体匹配是立体视觉研究中的关键部分。其目标是在两个或多个视点中匹配相应像素点,计算视差。通过建立一个能量代价函数,对其最小化来估计像素点的视差,求得深度。概述 点P和Q,映射到左相机OR像面上的同一点p≡q...
立体匹配就4个步骤:匹配代价计算,代价聚合,计算视差,视差精化。 匹配代价计算: 一般是通过计算左右两图对应像素3个通道的灰度值差来决定匹配代价的,常用的就是基于像素点匹配代价计算,一般有AD, SD,TAD...
基于区域的立体匹配算法本算法从两幅彩色立体图像对中提取深度信息
基于 Opencv 的透视和鱼眼(全向)相机的立体校正和立体匹配。 本项目的特点是有两种整流方式。 第一种是传统的透视校正,即校正后的图像是透视的,因此可以在一行中应用立体匹配。 然而,由于全向相机的视场(FOV)...
在 MATLAB 中实现的立体匹配算法_代码_下载
6SSD算法,SAD算法,NCC算法,DP算法,DP_5算法,census算法
为解决局部立体匹配算法存在深度图边界区域不连续问题,本文提出了一种基于边缘约束的自适应引导滤波立体匹配算法。将梯度值和颜色信息结合进行匹配代价计算;然后,基于图像边缘局部特征,对图像的像素点基于颜色...
匹配窗口大小和形状是影响区域立体匹配算法效果的关键因素之一。根据相位一致性能反映灰度变化快慢情况和抗干扰能力较强的特点,对图像进行相位一致性检测,再根据监测的值确定像素的特性,然后按不同特性采用不同窗口...
立体匹配是图像处理领域的经典问题和研究热点之一。针对原始ASW 立体匹配算法中存在的运算时间过长以及遮挡区域的误匹配率高的问题,提出了一种改进优化方法。在自适应支持权重方法的基础上结合Rank变换方法...
[spdmap, dcost, pcost, wcost] = 立体匹配(imgleft, imgright, windowsize, disparity, spacc) 包含的标准图像来自[1] D. Scharstein 和 R. Szeliski。 密集两帧立体对应算法的分类和评估。 国际计算机视觉杂志,...
一组立体对是可用的,Kolmogorov和Zabih的算法可以在网上试用。在演示中,为了提高效率,算法在6个重叠的图像切片上运行。从本质上讲,还需要两个参数:K数据阻塞成本和λ有关忠诚。默认情况下,它们是自动调优的,...
用于立体匹配的三种算法,显示视差图,matlab代码

大部分基于卷积神经网络的双目立体匹配算法往往将双目图像对的像素级别特征作为匹配代价进行计算,缺乏将全局特征信息结合到立体匹配算法的能力,导致不适定区域(如弱纹理区域、反光表面、细长结构、视差不连续区域等)...
基于opencv2.4.9中的立体匹配三种算法,去掉了校正图像的步骤,可以直接使用校正好的标准图像进行实验,对比视差图的效果!环境是VS2010!
引入辅助任务信息有助于立体匹配模型理解相关知识,但也会增加模型训练的复杂度。为解决模型训练对额外标签数据的依赖问题,提出了一种利用双目图像的自相关性进行多任务学习的立体匹配算法。该算法在多层级渐进细化...
立体匹配平台middlebury上的可以用于匹配的常用的图片,2005年的匹配图片库。
Census立体匹配算法的硬件实现.pdf
立体匹配技术是计算机视觉领域的研究热点,由于问题本身的病态性,一直没有得到很好地解决。针对现有局部立体匹配算法精度不高以及易受光照失真影响的问题,提出了一种基于改进梯度匹配代价和自适应窗口的匹配算法。...
提出了一种基于共同视域的自监督立体匹配算法, 该算法根据视差的左右一致性来确定双目图像的共同可视区域, 从而抑制被遮挡区域产生的噪声, 为网络模型的学习提供了更加准确的反馈信号。研究结果表明:在没有任何标签...
为改善传统立体匹配视差图中目标边缘的毛刺现象,以及弱纹理和视差不连续区域的“阶梯效应”等,提出了一种结合局部二进制表示和超像素分割的立体匹配方法。首先融合二进制表示的窗口内像素的空间和颜色特征进行代价...
一个Matlab项目,实现了具有自适应窗口形状的Kanade立体匹配算法。 文件索引: Benchmark1.m-关于9种以上窗口形状的初始工作 Benchmark3.m-我们算法的主要实现。 它使用以下功能: 不确定度.m:在给定窗口内计算不...
为了提高基于双目视觉中立体匹配在弱纹理场景下的精准性,提出了一种基于注意力机制特征提取的三维重建算法。利用卷积神经网络(CNN)训练左右图像的特征表示,计算出立体匹配的匹配代价。在CNN特征提取阶段,加入图像...
推荐文章
- 台式计算机有没有无线连接模块,台式机能不能连接wifi_台式机怎么连接wifi-程序员宅基地
- OpenGLES编程思想-程序员宅基地
- linux命令行去掉滴滴声_linux一直叮叮叮-程序员宅基地
- Java从零开始 第10.5讲 面向对象的习题课_编写一个测试类booktest,创建几个book对象,并打印它们的字符串表示,同时判断-程序员宅基地
- Spark伪分布安装(依赖Hadoop)_下载spark的hadoop依赖-程序员宅基地
- TCP/IP 是用于因特网 (Internet) 的通信协议_广泛应用在internet中的tcp/ip的网络管理主要使用的是 ____协议。 (填空题)-程序员宅基地
- java中的一些经典算法_java中temsize+=1运算-程序员宅基地
- Linux习题简答题_linux中,第一个普通用户的uid为____。-程序员宅基地
- 【路径规划】基于matlab粒子群算法新型概率密度无人机作战路径规划【含Matlab源码 2620期】_已知目标出现概率热图matlab无人机路径规划-程序员宅基地
- navicat执行.sql文件_navicat执行sql文件-程序员宅基地