激光雷达安装在自动驾驶车辆上,在车辆行驶过程中采集到的激光点云数据建立的三维环境模型存在一定的变形,不能真实反映某一时刻自动驾驶汽车的行驶环境。所以本文对获取一帧点云数据后如何做点云的运动补偿修复畸变...
”激光雷达点云障碍物检测“ 的搜索结果


利用激光雷达做感知输出首先要分割出地面点云以减少对障碍物聚类的影响。本文首先介绍RANSAC的基本原理,并依据RANSAC在ROS中实现对地面点云的分割。接着,引入PCL点云库,PCL点云库中有标准的RANSAC算法接口,我们...
摘要:对apollo7.0感知模块进行梳理,分析了其激光雷达障碍物感知算法流程。

前面总结了几种基于激光雷达点云数据的3D目标检测算法,还有一些算法不再单独列出,这里做个简单总结来分享下! 基于激光雷达点云的3D目标检测算法 1、End-to-End Multi-View Fusion for 3D Object Detection in ...

定安卓智能手机为测量平台的便携、快捷的树高测量...物量,因此,森林生物量的估算成为现代林业科研的热点问题,特别是大尺度区域森林生。术的发展和进步被引入中国,是近些年发展极为迅速的一种主动方式的遥感技术。
介绍激光雷达的测距原理,优缺点;基于PCL实现激光雷达点云数据的预处理,介绍直通滤波器、体素滤波器和统计滤波器的实现原理及代码。
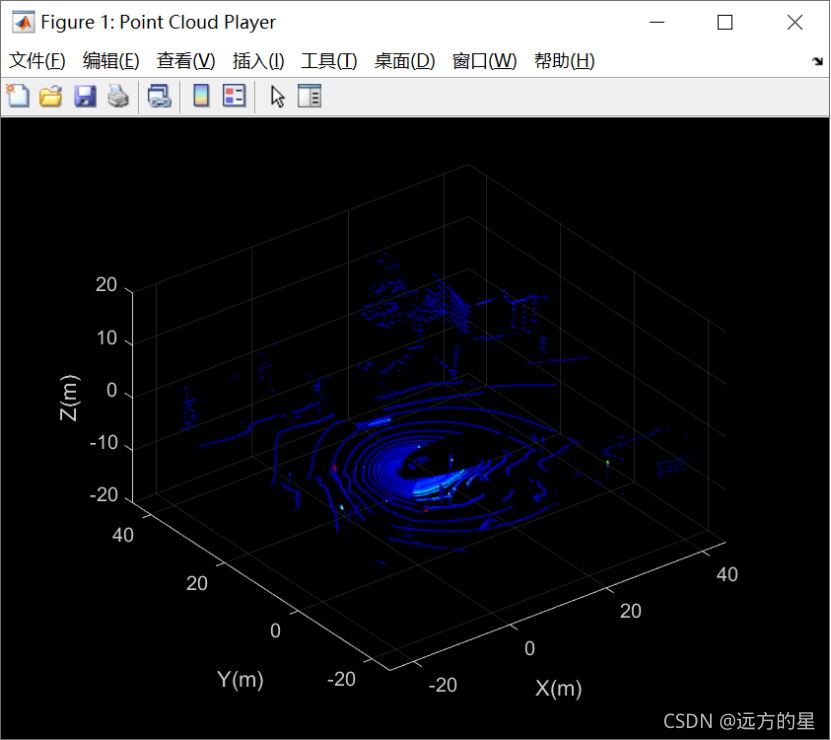
基于高度差法的三维雷达数据障碍物识别,是一种相对简单识别出障碍物的方法雷达型号:HDL-32 本文依据该方法利用Matlab编写程序仿真 其中LIDAR.m为主程序,Velodyne-HDL-32-Data1.csv为HDL-32雷达的输出数据,运行...
基于视觉和激光雷达融合的障碍物检测是一个比较复杂的问题,需要用到多种技术和算法。以下是一个简单的示例代码,用于演示如何使用OpenCV和PCL库来实现基于视觉和激光雷达融合的障碍物检测。 ```python import cv2 ...

点云PCL免费知识星球,点云论文速读。文章:LiDAR point-cloud processing based on projection methods: a comparison作...



点击上方“3D视觉工坊”,选择“星标”干货第一时间送达文章导读 采用传统的点云处理算法做障碍物检测有一个重要的环节就是地面分割,本文介绍各种常用的地面分割方法,并通过实际测试分析其场景的不...
文章目录前言一、激光雷达和相机二、...(1)输入为 Lidar 得到的点云数据,输出为检测到的障碍物 (2)由 HDmap 来确定 ROI (region of interest),过滤 ROI 区域外的点 (3)处理点云数据,探测并识别障碍物 (由 .
因此在丢失相机探测数据的情况下,依然能够输出激光雷达的检测结果,对两个传感器的感知信息进行融合,提高融合检测和测距的精度,同时实现连续。感器探测到的目标列表不完全一致,需要根据两两之间的相关性,判断...
随着智能驾驶领域的快速发展与普及,激光...由于激光雷达不受光线影响、分辨力高、支持3D立体,点云还支持AI算法训练等优点,一些主流车型在L3级别的智驾功能应用上搭载了激光雷达,从而完成更可靠和准确的目标探测。
次,激光雷达获取的点云数据是稀疏且无序的,而相机获取的是有序且稠密数据。中提到,要加快推进中国智能汽车发展,推进智能汽车新技术的研究,抢占智能。的发展有助于减少交通事故的发生,降低汽车带来的环境污染,...

最近看点云处理的相关算法,发现BFS也可以用于点云的聚类,于是用16线激光雷达点云做了下实验。 不过首先需要对激光雷达点云进行有序排列,将点云数据根据行列存入一个点云变量中。16线激光雷达的扫描范围为...

失值越低,模型的性能越好。根据不同模型的特点,往往需要设计不同的损失项,标,我们也同样在这个新的评价标准上对比我们的方法和现阶段...的障碍物,并分别用上述三种测距方法进行纵向和横向距离的测量,试验结果如。
激光雷达每完成一次检测会旋转一定角度继续检测,直到转完360度即可得到雷达周围障碍物的分布。数组中每一个元素代表激光雷达从起始角度到终止角度每一次扫描得到的测距。在RViz中,激光雷达数据通过添加LaserScan...
激光雷达的基本原理是发射激光至物体表面,接收返回的激光,并根据发射与返回的时间差,计算激光方向上障碍物的距离,还可以记录返回的激光的强度。返回的数据一般以点云形式提供给上层应用,用以识别障碍物类型。 ...
态物体的三维检测,但是激光雷达产生的点云(Point Cloud)只有位置信息,细节信。抗干扰能力非常强,但是因为毫米波雷达发射的波束量有限,导致接受的信号量很少,其中,相机可以提供车身周围丰富的色彩信息,帮助...
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地