本文主要对SLAM技术进行介绍,叙述了...SLAM技术综述与入门 SLAM技术介绍 VSLAM系统及相关资料介绍 SLAM框架 SLAM的基本过程 SLAM的主要模块 kinect 在ROS下的配置及使用 1.SLAM技术介绍 SLAM...
”激光SLAM综述“ 的搜索结果

点云的分割与识别: 对3D点云进行分割的方法可以分为基于边缘的方法,区域增长,模型拟合,混合方法,机器学习应用程序和深度学习[20]。SLAM包含了两个主要的任务:定位与构图,在移动机器人或者...2D激光雷达SLAM。
SLAM综述论文整理分享
标签: slam 综述
里面包含了对于激光SLAM、视觉SLAM、多传感器融合SLAM的发展,各种方法的优缺点的整理,引用整理了多篇论文,有需要的可以自行查看

LOAM中作者解析地求出了雅各比的表达式(其中使用了一些小技巧统一了不同特征点的残差函数的导数表达),ALOAM则是简单地使用了ceres提供的自动求导工具(这样可以节省开发的时间,得到了也是准确的解,但是运算时间...

激光SLAM导航移动机器人定位算法研究综述 激光SLAM导航移动机器人定位算法研究综述 激光SLAM导航移动机器人定位算法研究综述
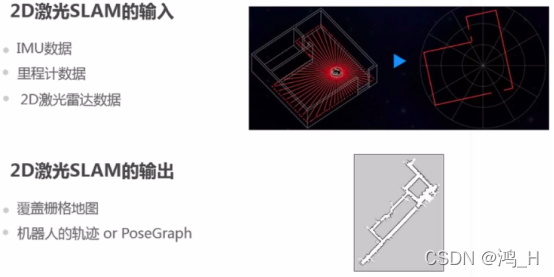
激光SLAM的处理流程 激光雷达数据处理 激光数据帧间匹配(前段匹配) 激光回环检测 非线性最小二成优化(后端优化) 激光数据的预处理 激光雷达运动畸变去除 里程计数据矫正 不同系统之间的时间同步 数据帧间...
作者|Sky Shaw 编辑|一点人工一点智能原文链接:https://zhuanlan.zhihu.com/p/501102444点击下方卡片,关注“自动...获取视觉SLAM、激光SLAM、RGBD-SLAM等多篇综述!01 引言:SLAM概念与结构1.1 SLAM概述首先,本...


零基础如何入门激光SLAM
标签: slam入门
最近有几个人加我,都说是刚开始学激光slam,基本都是研一,情况也都差不多,有的是课题组里只有自己做slam,有的是完全没人带,自己也没有基础. 仔细想一想,其实入门slam真是个不容易的事. 首先,编程语言,...
第二节讲述激光SLAM:激光传感器,开源系统,深度学习的应用。 第三节讲述视觉SLAM:相机传感器,开源系统,视觉惯性里程计,深度学习的应用。 第四节讲述激光雷达与视觉的融合。 最后展望SLAM的发展前景。 第一节:...
激光SLAM的发展和应用趋势
标签: 单片机


本文对SLAM进行了概述,包括激光雷达SLAM,视觉SLAM及其融合。对于激光雷达或视觉SLAM,该文章调查说明了传感器的基本类型和产品,开源系统的分类和历史,嵌入的深度学习,挑战和未来。另外,补充了视觉惯性里程计的...
SLAM论文:同时定位与建图前言一、概述二、Lidar SLAM 前言 同时定位与建图(SLAM)基于自我感知实现了同时定位与地图构建的目的。这篇论文对于新研究人员掌握SLAM的发展并非常明确地学习是非常友好的。此论文也可以...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达SLAM包含了两个主要的任务:定位与构图,在移动机器人或者自动驾驶中,这是一个十分重要的问题:机器人要精确的移动,就必须要有一个环境...
点击上方“AI算法修炼营”,选择加星标或“置顶”标题以下,全是干货前面的话好久没有更新SLAM系列的文章了,前面我们讲到了激光SLAM技术。基于激光雷达的同时定位与地图构建技术(simu...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达SLAM包含了两个主要的任务:定位与构图,在移动机器人或者自动驾驶中,这是一个十分重要的问题:机器人要精确的移动,就必须要有一个环境...

自己做过笔记的论文《惯性_视觉_激光雷达SLAM技术综述_毛军》 纯笔记用,方便自己查找,如有侵权立即删除!
SLAM学习-论文综述(一)本文综述了激光雷达SLAM、视觉SLAM及其融合技术。 对于新的研究人员来说,掌握SLAM的发展并非常清楚地了解它是非常友好的。此外,本文还可以作为有经验的研究人员寻找新的兴趣方向的词典。
分享SLAM包含了两个主要的任务:定位与构图,在移动机器人或者自动驾驶中,这是一个十分重要的问题:机器人要精确的移动,就必须要有一个环境的地图,那么要构建环境的地图就需要知道机器人的位置...
疫情原因一直在家,所以把之前学习的某蓝学院的激光SLAM的教程做一个学习笔记记录一下。话不多说,直接开始!
第二节讲述激光SLAM:激光传感器,开源系统,深度学习的应用。 第三节讲述视觉SLAM:相机传感器,开源系统,视觉惯性里程计,深度学习的应用。 第四节讲述激光雷达与视觉的融合。 最后展望SLAM的发展前景。 第一节:...
推荐文章
- javafx预览PDF_javafx pdf-程序员宅基地
- ipv4与ipv6访问_纯ipv4访问纯ipv6-程序员宅基地
- css强制换行-程序员宅基地
- 链霉亲和素修饰的CdSe–ZnS量子点-程序员宅基地
- 饿了么4年 + 阿里2年:研发路上的一些总结与思考-程序员宅基地
- vue的sync语法糖的使用(组件父子传值)_sync传值-程序员宅基地
- 最大流最小割_网络最大流量与割的容量的关系-程序员宅基地
- queryString模块_querystring模块安装-程序员宅基地
- 安卓电量检测工具Battery Historian的使用记录_battery-historian 电量测试-程序员宅基地
- 基于QPSK的载波同步和定时同步性能仿真,包括Costas环的gardner环_qpsk符号同步-程序员宅基地