
”激光SLAM之Gmapping(2)算法分析解读_aidimoli123的博客-程序员宅基地_gmapping算法原理“ 的搜索结果

此次记录Gmapping学习的过程,笔者能力尚缺,欢迎大家一起交流啊~ 一、gmapping代码解析 我们先来看看Gmapping里的main.cpp #include <ros/ros.h> #include "slam_gmapping.h" int main(int argc, char...
零基础从零开始写VO视觉里程计代码实战
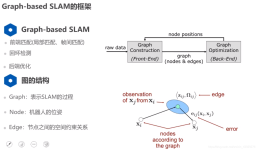
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达前面的话好久没有更新SLAM系列的文章了,前面我们讲到了激光SLAM技术。基于激光雷达的同时定位与地图构建技术(simultaneo...

1:SLAM是什么 SLAM是同步定位与地图构建(Simultaneous Localization And Mapping)的缩写,最早由Hugh Durrant-Whyte 和 John J.Leonard提出。SLAM主要用于解决移动机器人在未知环境中运行时定位导航与地图构建的...

ORB_SLAM2小伙伴们应该相当熟悉了,但是怎么在ROS下来跑ORB_SLAM2呢?下面是LZ的一点心得,也许可以帮助一些小伙伴减少点弯路(⊙o⊙)? 1.安装依赖项 主要的依赖项有eigen3,Pangolin,OpenCV, c++ or c++0x ...

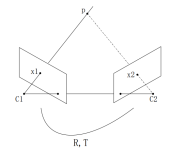
单应矩阵的概念、计算原理和重投影误差评分
首先clone高博的代码 git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git ...解压 orbslam2_modified.zip文件,将这个文件夹下的ORB_SLAM2_modified文件夹拖出来覆盖到根目录下的ORB_S...
扫描匹配器中的爬山优化,似然度和匹配度的计算,以及地图更新。
最近在搞p3at,因此下载了p3at的urdf模型,并在其中加入了激光雷达...报错内容大致为[slam_gmapping-2] process has died可能是因为ubuntu自带的gmapping版本很旧。 解决办法: 在工作空间的src下: git clone https:
实体机器人是GMapping算法的必需品,必须要有里程计的输入数据。然而,ROS中提供了Laser_scan_matcher包可以被用于里程计估计器,因此可以比较好的胜任所需要的任务:使用激光数据构建一个里程计供GMapping使用。
1、hector-slam代码框架概述 下载源码:git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git 原理解读参照:https://blog.csdn.net/weixin_40047925/article/details/80679496 其中包含了许多...

文章目录我自己的DS-SLAM安装记录系统版本&硬件CUDA & cudnnROS Kinetic遇到的问题opencv + caffe如果你安装的是caffe-segnet-cudnn7的版本如果你安装的是caffe-segnet-cudnn5的版本,你可能会遇到如下问题...

二、解读launch文件:gmapping_demo.launch 打开launch文件gmapping.launch: 三、解读launch文件:mrobot_teleop.launch 打开Python文件mrobot_teleop.py: 一、解读launch文件:mrobot_laser_nav_gazebo....
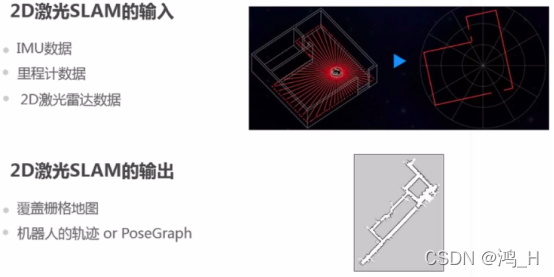
使用slam_gmapping,您可以从移动机器人收集的激光和姿势数据创建2-D占用网格地图(如建筑平面图)。1、外部文档这主要是第三方包; 底层的GMapping库是外部文档。查看有关下面列出的许多参数的详细信息。




需要用到激光slam做底层,手头没有激光,只能鼓捣点其他办法了,跑数据集就是一个!1,第一种办法 下载编译安装turtlebot_simulator。然后roslaunch turtlebot_stage turtlebot_in_stage.launch会报错:Invalid ...
推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地