
”深挖双目视觉定位技术细节-标定函数_sun19890716的专栏-程序员宅基地“ 的搜索结果
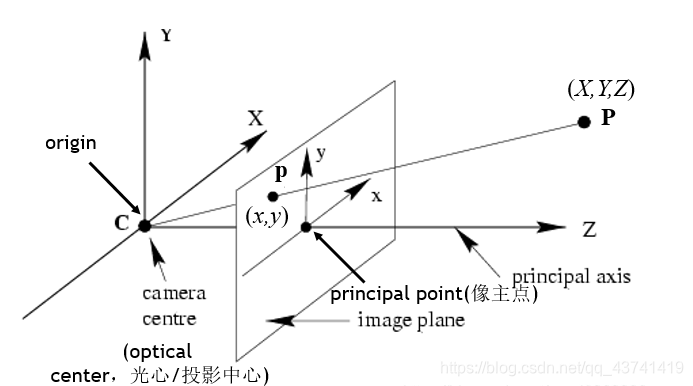

相机的内外参与相机标定 我们所生活的现实世界是一个三维的世界,人类生活期间,已经能够熟练地估计周围物体的深度及定位,但是,现在的照相机一般都只能拍摄二维图像,场景从三维变到二维的时候,一个最重要的信息...
这一代码中实现标定过程实现的很简单,很容易上手,测距功能也可以使用,而且最终测距的效果也很准确,比之前的代码好很多。 这个文章写了修改后代码的具体实现和运行过程中出现的一些问题。






halcon 激光三角测量 (片光技术)标定 ,示例 calibrate_sheet_of_light_3d_calib_object.hdev Halcon自定义函数算子翻译xyz_to_object_model_3d (Operator)????点击直接资料领取???? * This example shows how...



在ROS系统中,使用imu_utils和kalibr完成IMU内参标定、相机内外参标定和相机-IMU联合标定。
如上图所示,双目测距主要是利用了目标点在左右两幅视图上成像的横向坐标直接存在的差异(即视差)与目标点到成像平面的距离Z存在着反比例的关系:Z=fT/d。 假设目标点在左视图中的坐标为(x,y),在左右视图...
相机标定后,对采集的图像进行畸变矫正,代码如下: if( !capture.isOpened() && showUndistorted ) { Mat view, rview, map1, map2; initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(), ...
相机标定——单目标定和双目标定 1.标定目的 在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机...
This program demonstrates how to perform the calibration of a ...用halcon标定板标定激光三角测量系统 The measurement system consists of an area scan camera and这个测量系统包括面扫描相机和激光线投影器 a li
深入探究深度学习、神经网络与卷积神经网络以及它们在多个领域中的应用

张正友相机标定Opencv实现,附棋盘图和14张不同角度标定图。 包含完整的工程代码,有详细的注释说明,一键运行。实现了相机标定、输出相机内参、外参、旋转和平移矩阵、标定效果评价、以及使用标定结果对原始棋盘图...
5.2-手眼标定(外参标定)
标签: 人工智能

在之前的文章里,我们重点debug了RPN网络对于ROI的生成,详细阐述了第一次坐标调整的细节实现;以及Classifier网络对于最终结果的作用,详细阐述了第二次坐标调整的细节。这就是two-stage目标检测算法的核心。但是在...


本文将介绍如何使用 LIS2MDL 传感器来读取数据来转化为指南针。地磁场强度范围约为 23,000 至 66,000 nT ,并且可以建模为磁偶极子,其场线起源于地球地理南部附近的点,并终止于磁场附近的点。...

推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地