
”深挖双目视觉定位技术细节-标定函数_sun19890716的专栏-程序员宅基地“ 的搜索结果


看了好几天的双目视觉标定,还是没有完全掌握。现在把已经了解到的整理下,方便后面进一步的学习掌握。 双目视觉标定就是通过求解实际三维空间中坐标点和摄像机二维图像坐标点的对应关系,在双目视觉中,三维空间...
手眼标定问题描述 在机器人校准测量、机器人手眼协调以及机器人辅助测量等领域,都要求知道机器人执行器末端(抓取臂)坐标系和传感器(比如用来测量三维空间中目标位置和方向并固定在机器人手上的摄像机)坐标系...





标题:Accurate detection and 3D localization of humans using a novel YOLO-based RGB-D fusion appr...
左右分别单目标定->M、D2.求T、R原理:假设空间中有一点P,其在世界坐标系下的坐标为P W PW,其在左右摄像机坐标系下的坐标可以表示为: P l =R l P W +T l Pl=RlPW+Tl P r =R r P W +T r...

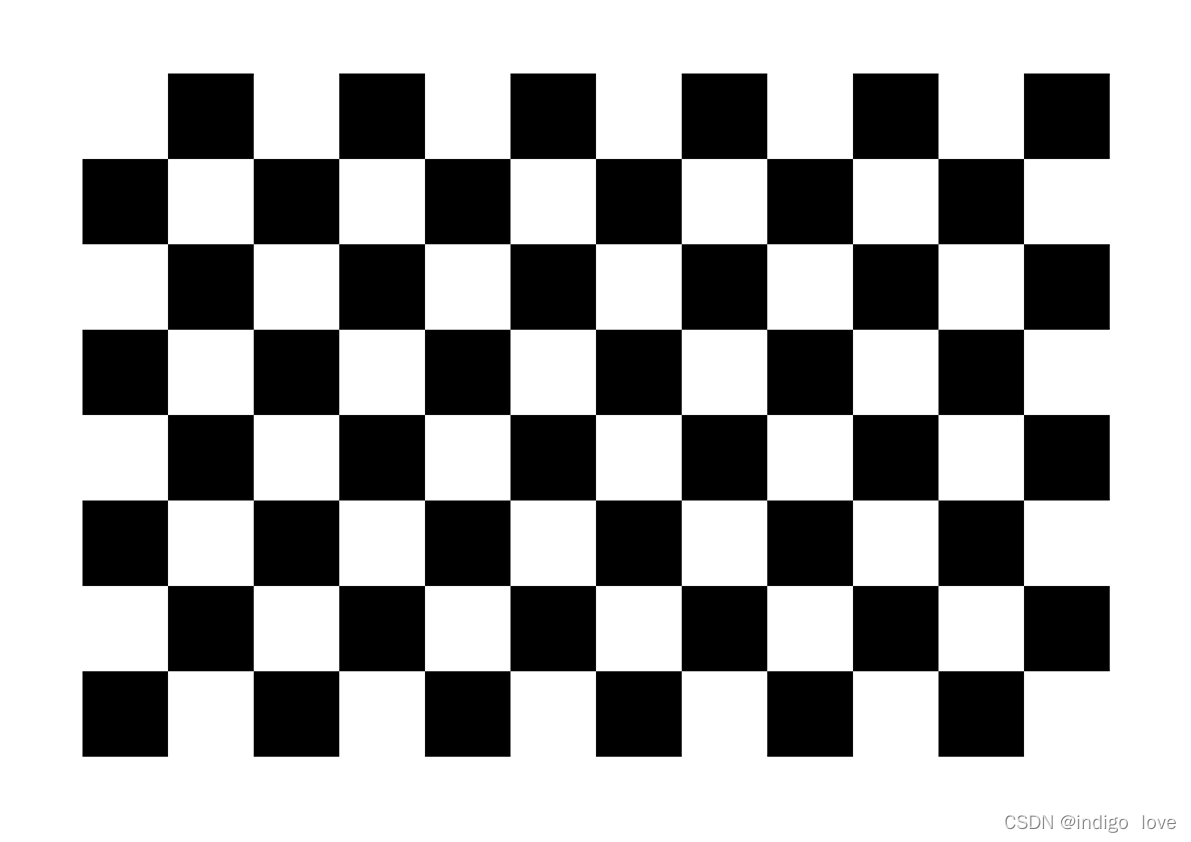
双目标定代码。解决方案Opencv已配置好。里面有说明文档和实验图片。可以直接运行,也可以根据自己的需要重新拍摄图像进行双目标定。


双目视觉系统已经被广泛应用在很多领域,但其定位精度仍难以满足工业要求。为了进一步提高它的精度,可以限制一些参数,使参数在这些范围内可以达到最佳精度。现在需要做的便是找到这些参数,并分析每一个参数和可能...


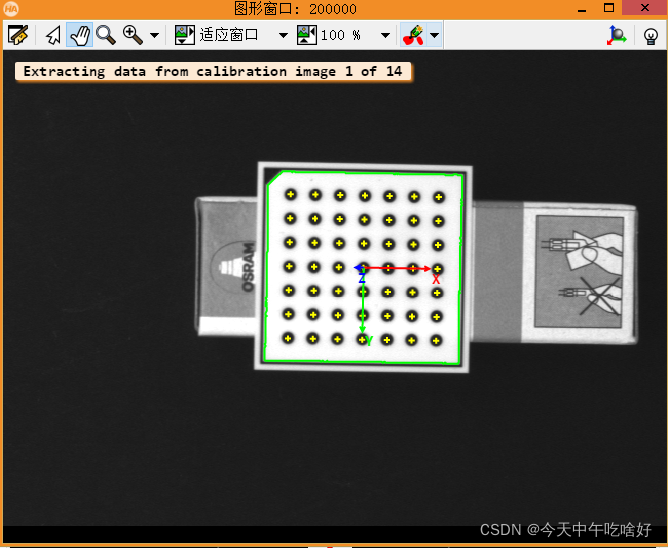
1 整体介绍相机标定为Matlab工具箱 http://www.vision.caltech.edu/bouguetj/calib_doc/ 相机标定为Matlab工具箱 这是一个释放相机标定为Matlab工具箱 庐 完整的文档。 这...


我们已经了解了相机如何通过在 2D 传感器平面上投射光线来拍摄 3D 场景,生成的图像准确地表示了在...为了恢复场景的 3D 结构和摄像机的 3D 姿态,我们需要对相机参数进行校准,在本节中,我们将介绍如何执行相机标定。


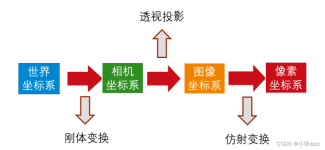
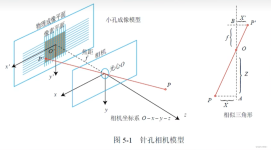
最近在学习多传感器标定,顺便将学习心得记录一下。 视觉图像的原理主要是小孔成像,成像跟孔的大小及焦距有关,此处不关注孔的大小,但会涉及到焦距。 视觉标定主要涉及四个坐标系: 像素坐标:u,v 图像坐标:...
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地