
”深度学习如何跑视差图“ 的搜索结果
更新:2015 年 3 月 17 日通过 OpenCV 获得了一张视差图! 更接近工作的虚拟鼠标。 在手模型类中需要某种形式的PID纠错,以及一些读取视差图的代码。 否则,一些移动和点击鼠标的功能应该不会太难。 示例截图: : ...
通过深度信息在单景影像上的特征进行学习,实现单幅图像对特定场景的深度反演,后续可以考虑使用大数据学习TensorFlow技术实现。
unet模型的特点Unet是比较早的基于深度学习的分割算法了,优点是速度真的快P100上基于VGG的backbone能跑到50帧,同时不是太开放的场景下可以做到令人满意的分割效果,在对实时性要求较高的场合下是比较适用的不是...

目录 概述 31.1. 背景 31.2. 目标跟踪问题描述 31.3. 目标跟踪测试数据集及性能评价标准 4 算法选型 102.1. 现有算法分类 102.2. 图像目标跟踪方法 111.概述1.1.背景行为识别的前提是需要对人体目标进行识别和跟踪...
计算机视觉是研究如何使计算机系统能够理解和解释图像和视频数据的领域。计算机视觉的目标是让计算机具备类似于人类视觉的能力,包括感知、理解、分析和解释图像和视频数据。通过计算机视觉技术,计算机可以自动提取...

怕以后忘了,现在总结一下前段时间一直在弄的东西。总结了一下我对于双目景深和测距原理的理解,贴出了基于opencv 来实现双目景深和测距的代码。


4521火车推理MannequinChallenge(MC)数据集静态场景,移动摄像机MVS深度(supervison)移动的人,移动的相机人类遮罩初始深度从流RGB图像预测深度深度预测通过观看冻结的人来学习移动人的深度李正奇李塔利德克尔...

VIO/VINS/VSLAM问题定位流程与思路
SLAM面经
开发者社区技术周刊又和大家见面了,萌妹子主播为您带来第四期“开发者技术联播”。让我们一起听听,过去一周有哪些值得我们开发者关注的重要新闻吧。京东自研联邦学习平台正式亮相Facebook ...



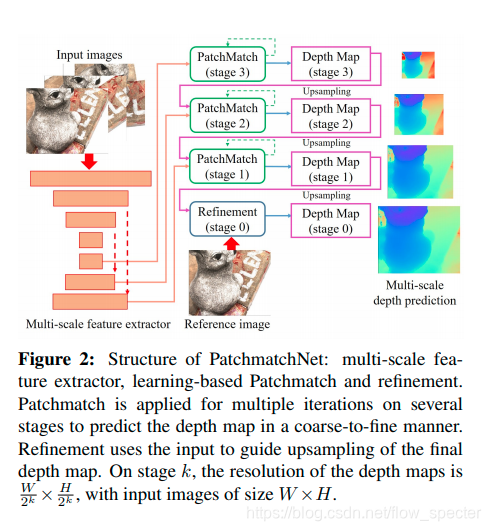
Joshua Manela,Michael Happold,Deva Ramanan1卡内基梅隆大学,2Argo [email protected]{jmanela,mhappold,dramanan} @ argo.ai图1:在建议的数据集上具有从粗到细的层次结构的按需深度感测的图示。...


高精度地图技术与展望
标签: c++

最近在学习三维重建方面的知识,而目前效果比较好的算法有KinectFusion(Kinfu)、ElasticFusion、InfiniTAM、DynamicFusion、BundleFusion等,我就不一一介绍了,感兴趣的参考... 作为Ubuntu爱好者,在综合了编译环境...
文章目录概述网络结构特征提取网络代价空间可微分的argmin分层的Refinement损失函数实现细节实验数据和实验设置亚像素精度讨论 ...StereoNet在Nividia Titan X上可以跑到60帧,可以归类于基于2D卷积的端到端


最近接触到了AR.Drone的无人机,开放接口这种事情最喜欢了,似乎可以用深度信息来控制无人机的运动,不过介于无人机只有单目摄像头的限制,不得不转换思维,开始搜集论文研究如何用单目视觉信息来获取深度。
推荐文章
- react常见面试题_recate面试-程序员宅基地
- 交叉编译jpeglib遇到的问题-程序员宅基地
- 【办公类-22-06】周计划系列(1)“信息窗” (2024年调整版本)-程序员宅基地
- SEO优化_百度seo resetful-程序员宅基地
- 回归预测 | Matlab实现HPO-ELM猎食者算法优化极限学习机的数据回归预测_猎食者优化算法-程序员宅基地
- 苹果发通谍拒绝“热更新”,中国程序猿“最受伤”-程序员宅基地
- 在VSCode中运行Jupyter Notebook_vscode jupyter notebook-程序员宅基地
- 老赵书托(2):计算机程序的构造与解释-程序员宅基地
- 图像处理之常见二值化方法汇总-程序员宅基地
- 基于springboot实现社区团购系统项目【项目源码+论文说明】计算机毕业设计-程序员宅基地