
”深度学习如何跑视差图“ 的搜索结果

更新:2015 年 3 月 17 日通过 OpenCV 获得了一张视差图! 更接近工作的虚拟鼠标。 在手模型类中需要某种形式的PID纠错,以及一些读取视差图的代码。 否则,一些移动和点击鼠标的功能应该不会太难。 示例截图: : ...

在学习unity的过程中,被各种贴图弄得晕头转向,为了弄清楚各种贴图,查询了很多资料,粗略的整理如下,只要耐心看完,对贴图的基本用法基本上就没问题了。 1.Albedo 贴图 (可以看做是Diffuse颜色贴图) Albedo:...
在进行嵌入式视觉学习的时候,很多时候我们会用到立体匹配并生成3D点云,本次博客,林君学长主要带大家学习灰度及彩色图片的立体匹配,并生成灰度和彩色的3D点云,一起来看吧! 一、数据准备和库的安装及配置 1、...
沙特国王大学学报-计算机与信息科学34(2022)1663-1673基于深度学习的立体匹配算法:A调查莫哈末萨阿德哈米德a,努鲁法贾尔阿布德马纳普乙,罗斯塔姆阿芬迪哈姆扎a,⇑,艾哈迈德福乌赞卡德明aa兼提技术职业电&电子...
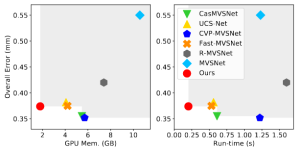
Cascade Cost Volume for High-Resolution Multi-View Stereo and Stereo Matching CVPR 2020 ...首先构建特征金字塔,每一步通过上一步的结果缩小深度假设范围 同样也是coarse-to-fine: gradually hi.

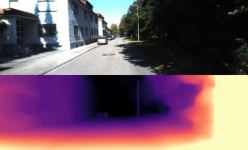
本文来源于联盟成员翻译笔记 昨日(4月25日)刚更新的文章 ... 摘要: 本文提出了一种在自由移动的场景中预测...在本文中采用数据驱动的方法,从一个新的数据源中学习人类的深度先验信息:成千上万的模仿人体模型...
目录概述 31.1. 背景 31.2. 目标跟踪问题描述 31.3. 目标跟踪测试数据集及性能评价标准 4算法选型 102.1. 现有算法分类 102.2. 图像目标跟踪方法 111.概述1.1.背景行为识别的前提是需要对人体目标进行识别和跟踪,现...
目标跟踪的深度学习方法 与 opencv实现kcf方法necther6人评论7357人阅读2018-04-09 14:53:55目录概述 31.1. 背景 31.2. 目标跟踪问题描述 31.3. 目标跟踪测试数据集及性能评价标准 4算法选型 102.1. 现有算法分类 ...
此网络是两年前发表的,但在今天的KITTI2015榜单上来看,也属于速度很快、精度尚可的网络。这篇笔记主要记录我学习其源码遇到的一些问题和我自己的理解。

这项工作介绍了深度任何东西,这是一种用于鲁棒单目深度估计的高度实用的解决方案。在不追求新的技术模块的情况下,我们的目标是构建一个简单而强大的基础模型来处理在任何情况下的任何图像。为此,我们通过设计一个...

科研目的是为了学习基于深度学习的三维重建方法,尤其是立体匹配,深度估计等方面。为了配合深度学习的环境,将台式机装了ubuntu18.04的系统。 以下将首先介绍配置深度学习环境,其次是经典以及前沿的方法实验,最后...
Facebook最近推出了“3D照片”功能,让普通的照片能有3D显示效果:可以随着手机姿态的变化显示照片的不同视角,打开链接即可体验 https://www.facebook.com/applealmondblog/posts/1922679287846447 (手机上陀螺仪...

目标检测的研究可以追溯到20世纪90年代[18],2014年R-CNN[1]的提出标志着目标检测从传统手工特征时代进入到深度学习时代。2014年之前可以称为传统目标检测时代,其最具代表性的方法有VJ检测器[19]、HOG检测器[20]、...

NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式...

零基础从零开始写VO视觉里程计
图像去模糊数据源
标签: transformer 深度学习 人工智能
数据源

推荐文章
- centos7初始化mysql 5.7.9(源码安装)-程序员宅基地
- undefined reference to `cvHaarDetectObjects'()(人脸检测)_cvhaardetectobjects未定义-程序员宅基地
- 如何将参数传递给批处理文件?_批处理 传递参数-程序员宅基地
- C++的一些小总结 类 静态成员变量/函数 this指针_c++ class 静态指针函数-程序员宅基地
- springboot小区物业管理系统7ffeo[独有源码]如何选择高质量的计算机毕业设计_小区物业管理系统er图-程序员宅基地
- mac-gradle的安装和配置,掌握这些知识点再也不怕面试通不过_mac gradle配置-程序员宅基地
- 2032:【例4.18】分解质因数(信奥一本通)-程序员宅基地
- html怎么设置默认状态,网页中如何设置默认图片?方式介绍-程序员宅基地
- milp的matlab的案例代码_matlab30个案例分析案例5代码-程序员宅基地
- html实现/ 简约好看、美观大方的个人导航页源码/开源个人主页html源码_个人导航html-程序员宅基地