
”机器人操作系统“ 的搜索结果
自己总结的ROS基本操作
张伟建所著的关于ROS的一本书,全书共9章,介绍了ROS的基本知识,opencv,slam,抓取,kinetic,点云库,另外还有三个实例。是一本适合入门ROS机器人操作系统的书籍。欢迎大家下载
机器人操作系统ROS(九):MoveIt!与机械臂控制
经典书籍,机器人操作系统(Robot Operating System, ROS)是一个开源框架,用于开发复杂的机器人软件应用程序。它提供了一系列的库和工具,以帮助软件开发者创建模块化、可复用的代码,并实现不同硬件组件之间的...
目錄 前言 第一章 ROS简介 机器人时代的到来 ROS发展历程 什么是ROS 安装ROS 安装ROS-Academy-for-Beginners教学包 二进制与源码包 安装RoboWare Studio ...3中国大学MOOC---《机器人操作系统入门》 课 程讲义
江苏大学与科东软件联合研发“农业机器人操作系统”,并成立“农业机器人操作系统”联合实验室,奋力推进我国农业智能化,推动农业科技创新。“农业机器人操作系统”的技术革新,对提高农业生产效率、保护环境、应对...
操作系统 操作系统的定义:是一组控制和管理计算机软硬件资源,为用户提供便捷使用计算机的程序的集合。 基本功能:1.进程管理 2.存储管理 3.文件管理 4.设备管理 5.作业管理 基本组成: 1、驱动程序 最底层...
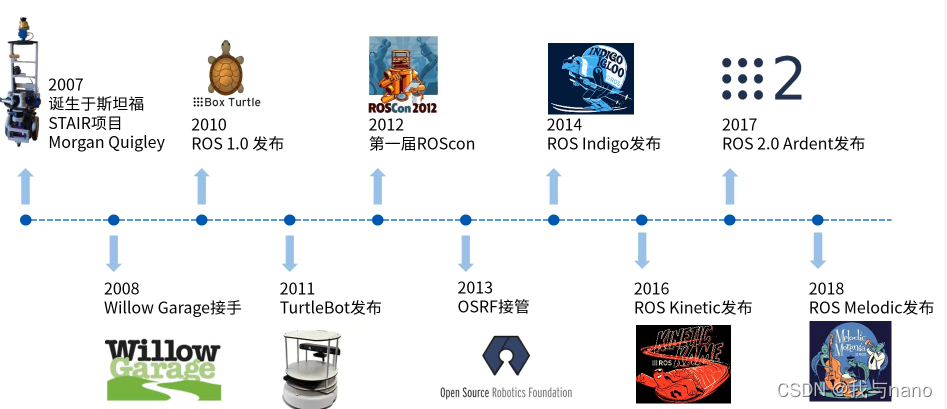
ROS1中所有节点都需要在节点管理器ROS Master的管理下进行工作,一旦Master出现问题,系统就面临宕机的风险,ROS2实现了真正的分布式,不再有Master这个角色,借助一种全新的通信框架DDS,为所有节点的通信提供可靠...
ROS是面向机器人的开源的元操作系统,本书主要机器人操作系统的入门级介绍
机器人控制/机器人操作系统教学实验平台包含机器人控制/机器人操作系统教学实验平台的所有功能,增配了智能驾驶平台和相关雷达/视觉导航配件,满足机器人控制及实训需求。人工智能已经成为当今科技创新的驱动力,其...
摘要:ROS(Robot Operating System,机器人操作系统)是一个灵活的软件框架,为机器人开发提供了强大的支持。本文旨在介绍ROS的基础操作,包括安装与配置、基本概念、常用命令、编程接口以及实际应用中的注意事项,...
机器人操作系统是为机器人标准化设计而构造的软件平台,它使得每一位机器人设计师都可以使用同样的平台来进行机器人软件开发。标准的机器人操作系统包括硬件抽象、底层设备控制、常用功能实现、进程间消息以及数据包...

智能机器人操作系统IROS,对标ROS,采用自研方式,2022.1.8 发布完全自主可控的智能机器人操作系统IROS V1.0.0,提供了分布式开发框架,消息、服务、参数、Action等主要通信性能指标较开源ROS提高百倍以上,综合采用...
MOOC《机器人操作系统入门》 课 程配套讲义
探索Unitree ROS:机器人操作系统的新星 项目地址:https://gitcode.com/unitreerobotics/unitree_ros 概述 在人工智能和自动化技术日新月异的时代,Unitree ROS是一个专为Unitree系列机器人打造的开源软件包。它...
探索未来科技:MyRover - 一个开源机器人操作系统 项目地址:https://gitcode.com/tianshiyeben/myrover MyRover 是一个创新的、面向未来的开源机器人操作系统,旨在为开发者提供一种简单易用的方式来构建和控制各种...
机器人操作系统(ROS)浅析.pdf
探索未来科技:ROS机器人操作系统与ithemal1/robotics-ros项目 项目地址:https://gitcode.com/itheima1/robotics-ros 在当今快速发展的机器人领域,ROS(Robot Operating System)已经成为了一个不可或缺的开源平台...
ROS Academy for Beginners:开启你的机器人操作系统学习之旅 项目地址:https://gitcode.com/yhexie/ROS-Academy-for-Beginners 项目简介 ROS Academy for Beginners 是一个面向初学者的开源项目,旨在帮助新接触...
机器人操作系统入门 课程讲义 ROS 柴长坤 中国大学MOOC 目錄 前言 第一章 ROS简介 机器人时代的到来 ROS发展历程 什么是ROS 安装ROS 安装ROS-Academy-for-Beginners教学包 二进制与源码包 安装RoboWare Studio 单元...
探索ROS2:新一代机器人操作系统详解 项目地址:https://gitcode.com/ros2/ros2_documentation ROS(Robot Operating System)是机器人研究和开发领域中的一个核心框架,而ROS2则是其最新一代版本,旨在提供更高效、...
探秘ROS Control:机器人操作系统中的控制框架 项目地址:https://gitcode.com/ros-controls/ros_control ROS Control是Robot Operating System(ROS)中的一个核心模块,它提供了一个强大的、灵活的控制系统设计...
#资源达人分享计划#
2013 年,译者所在研究团队将 NuBot 中型组足 球机器人的软件系统移植到了 ROS 框架下,并于 2014 年和 2015 年分别参加了在巴西若昂佩索阿和中国合肥举办的机器人足球世 界杯。使用 ROS 后 NuBot 足球机器人软件...
ROS机器人操作系统基础教程,里面的教程很详细,对于初学者来说非常友好,非常的系统全面,我不是作者,如有侵权请联系本人删除
#资源达人分享计划#
机器人操作系统(ROS)浅析——a gentle introduction to ros中文版 [美] Jason M. O'Kane 著 肖军浩 译 2015年9月才翻译完稿的~ 基于ros indigo版本(跟hydro差不多)~翻译者是中国第一批使用ros的人之一,国防...
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地