
”工业图像处理入门“ 的搜索结果
最近版上有不少人在讨论图像处理的就业方向,似乎大部分都持悲观的态度。我想结合我今年找工作的经验谈谈我的看法。就我看来,个人觉得图像处理的就业还是不错的。首先可以把图像看成二维、三维或者更高维的信号,从...
关于计算机图像基础知识的整理
标签: 图像处理
1.色彩深度: 1位:2种颜色,单色光,黑白二色,用于compact Macintoshes。 2位:4种颜色,CGA,用于gray-scale早期的NeXTstation及color Macintoshes。 ...3位:8种颜色,用于大部分早期的电脑显示器。...

当随着人工智能的发展,人们越来越多地将其应用于生活和工作中。本节将介绍如何利用 ChatGPT 生成 PPT 大纲,并将其转换为 Markdown 语言,以帮助读者熟悉 PPT 文档自动生成平台 MindShow 的使用方法。...

点云与三维图像的关系:三维图像是一种特殊的信息表达形式,其特征是表达的空间中三个维度的数据,表现形式包括:深度图(以灰度表达物体与相机的距离),几何模型(由CAD软件建立),点云模型(所有逆向工程设备都...
音视频、图像处理技术 音视频基础技术 图像/音频处理、采集、渲染、传输 音视频开发基础概念总结 Android中和音视频相关的API的梳理和总结 OpenSL ES基础入门,视频SurfaceView基础入门 收获:掌握音视频基础理论,...
最近版上有不少人在讨论图像处理的就业方向,似乎大部分都持悲观的态度。我想结合我今年找工作的经验谈谈我的看法。 就我看来,个人觉得图像处理的就业还是不错的。首先可以把图像看成二维、三维或者更高维的信号,...
学习Soc就业前景较好,向上可以从事数字芯片设计,通信,雷达,一些信号处理领域的工作。也可向下做一些FPGA开发,FPGA技术支持,芯片验证的岗位。 熟练使用ZYNQ需要较多的知识储备,既要学习使用FPGA(1年),也要...
最近版上有不少人在讨论图像处理的就业方向,似乎大部分都持悲观的态度。我想结合我今年找工作的经验谈谈我的看法。就我看来,个人觉得图像处理的就业还是不错的。首先可以把图像看成二维、三维或者更高维的信号,从...


点击上方“3D视觉工坊”,选择“星标”干货第一时间送达本文整理自知乎问答,仅用于学术分享,著作权归作者所有。如有侵权,请联系后台作删文处理。方法一作者|BBufhttps://www.z...
【ROS实践入门(十)ROS控制相机图像实践】 本内容经官网实例以及一些参考书总结而成,欢迎留言评论交流~ 联系方式:ziyuanw#foxmail.com(#换成@) OpenCV中的cv::VideoCapture类驱动摄像头。根据摄像头图像的...
王博Kings笔记总结

史上最强----机器学习经典总结---入门必读----心血总结-----回味无穷 让我们从机器学习谈起 导读:在本篇文章中,将对机器学习做个概要的介绍。本文的目的是能让即便完全不了解机器学习的人也能了解机器学习,...
现在越来越多的手机要使用到深度学习了,比如一些图像分类,目标检测,风格迁移等等,之前都是把数据提交给服务器完成的。但是提交给服务器有几点不好,首先是速度问题,图片上传到服务器需要时间,客户端接收结果也...



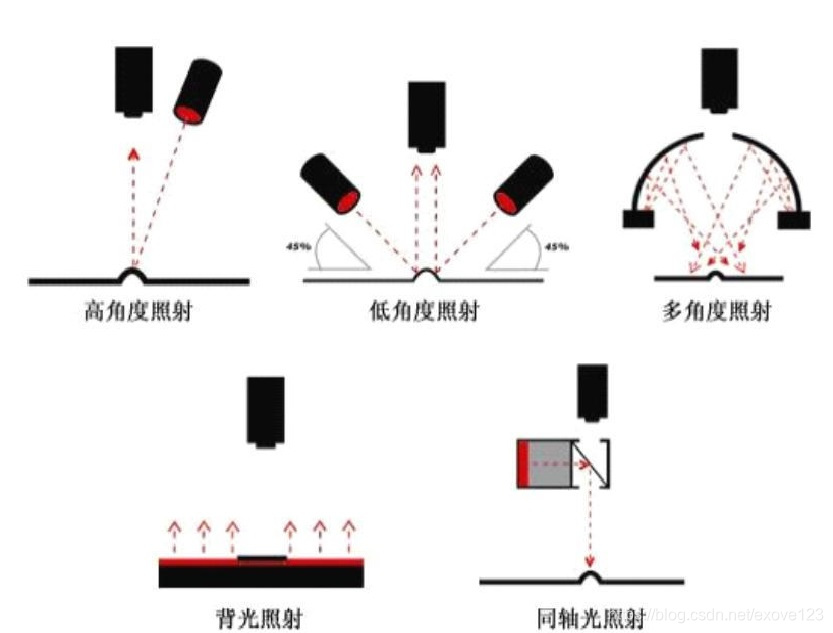
视觉图像处理软件是什么 都有那些软件 一、机器视觉图像处理软件包(算法库): 二、机器视觉程序开发环境: 三、国内机器视觉处理软件: 四 、机器视觉软件整体对比 五、机器视觉软件具体对比及分析 1、...
机器学习&深度学习入门学习资料大全(一)
ROS2入门教程-基本概念 介绍ROS2的基本概念 1. 基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。 ROS网络是指在ROS系统中不同的节点间相互通信...

课程介绍 伴随人工智能时代的到来,深度学习技术也发挥着越来越重要作用,越来越多的技术人才开始投身入这一行业中,并希望发展成为一名深度学习算法工程师。然而,在实际的工程设计中,深度学习研发者总会面临着...
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地