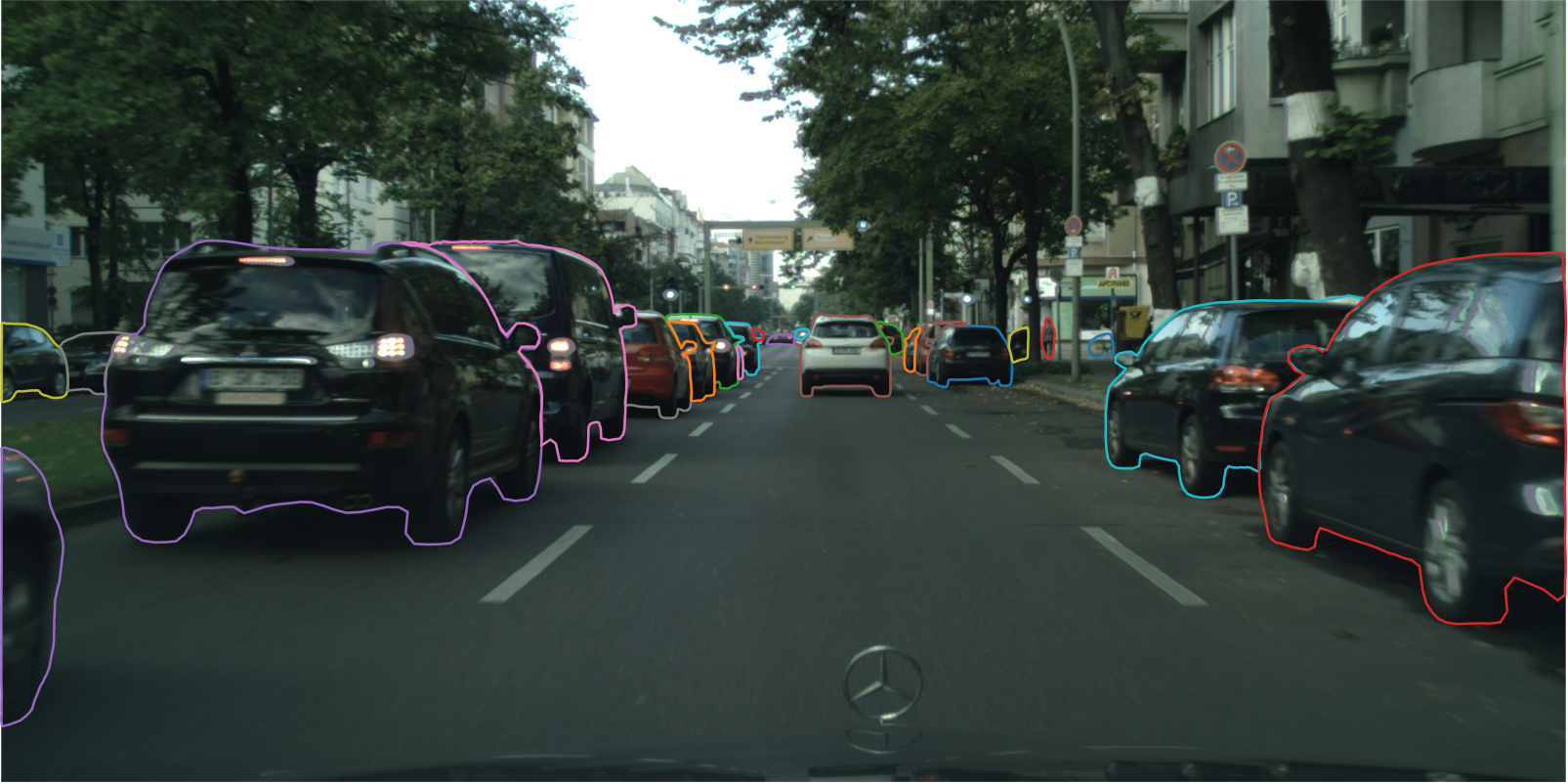
3D点云实例分割 3D语义分割区分场景中各类对象,3D实例分割区分场景中各类别中的各种个体。近两年来,3D实例分割的关注度越来越高,相应的方法也被接连提出。众多方法的思想主要分为两类:基于候选区域的实例分割...
”实例分割“ 的搜索结果

这篇博客是 基于 Google Colab 的 mask rcnn 训练自己的数据集(以实例分割为例)文章中 数据集的制作 这部分的一些补充 温馨提示: 实例分割是针对同一个类别的不同个体或者不同部分之间进行区分 我的任务是对同一...


mask2former提出了一个统一的分割架构,能够在语义分割、实例分割、全景分割上取得sota的结果,在coco数据集上,全景分割57.8PQ、实例分割50.1AP、语义分割在ADE20K达57.7miou。
双击exe——Next——I Argee——just me ——选择路径(建议自定义,不要安装到c盘,且安装路径不要出现中文)——两个勾都勾上,不然配置环境很麻烦——Install——接下来页面两个勾不选——fnish完成安装。...

点云分割_点云分割标注工具_支持语义分割+实例分割数据标注_超实用点云标注工具

这篇博客提供了一个全面的指南,介绍了如何使用 Ultralytics YOLOv8-seg 系列模型进行对象检测和分割任务。内容从环境搭建、模型选择、训练、验证到预测的完整流程都有详细说明。为想要使用 YOLOv8-seg 系列模型的...
语义分割和实例分割的区别是什么
标签: \N
语义分割和实例分割是两种不同的图像分割方法。 语义分割指的是将图像中的每个像素分配给一个或多个物体或场景的类别。它的目的是对图像进行分类,以便于计算机理解图像中的内容。 实例分割则是将图像中的每个物体...
OpenCV中使用Mask R-CNN进行基于深度学习的对象检测和实例分割

目前的实例分割方法可分为3类: top-down,也叫做 detect-then-segment,顾名思义,先检测后分割,如FCIS, Mask-RCNN, PANet, Mask Scoring R-CNN; bottom-up,也叫Embedding-cluster,将每个实例看成一个类别;...
版本正式发布,本次更新的v7.0则是全面的大版本升级,最主要的功能就是全面集成支持了实例分割,yolov5已经集成检测、分类、分割任务。前面几篇文章已经介绍过关于Yolov5的一些方面。
【计算机视觉 | 实例分割】干货:实例分割常见算法介绍合集

WHU建筑物实例分割数据集(已转为标准coco格式) 规模:7152张图像,20万栋建筑物 地面分辨率:0.3m 用途:mask rcnn等网络的训练与测试 遥感/建筑物提取/实例分割/图像处理


针对现有的实例分割方法PolarMask中分割结果边缘信息模糊的问题,通过对轮廓点角度偏置和距离的预测,基于轮廓点细化的单阶段实例分割网络准确提取出实例轮廓。同时,为了进一步提升实例分割的性能,利用语义分割子网络...

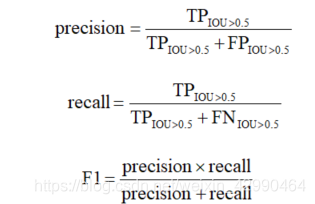
大纲目录逐像素做二分类,交叉损失函数,神经网络,分类任务就是一个交叉熵对样本来说,轮廓最难做。轮廓上的点越重要。下面的伽马是2,正负样本的比例。
输电线路实例分割数据集(1240多张+json+分割掩码),可以用于电气工程专业在计算机视觉应用领域做研究,例如目标检测、图像识别、深度学习等!!! txt文件内有下载链接和提取码,放心下载即可!!!!
mmdetection 实例分割任务 自定义数据集训练流程
推荐文章
- GPT-ArcGIS数据处理、空间分析、可视化及多案例综合应用
- 在Debian 10上安装MySQL_debian mysql安装-程序员宅基地
- edge 此项内容已下载并添加到 Chrome 中。_一个小扩展,解决Chrome长期以来的大痛点...-程序员宅基地
- vue js 点击按钮为当前获得焦点的输入框输入值_vue获得当前获得焦点的元素-程序员宅基地
- Android 资源文件中@、@android:type、@*、?、@+含义和区别_@android @*android-程序员宅基地
- python中的正则表达式是干嘛的_Python中正则表达式介绍-程序员宅基地
- GeoGeo多线程_geo 多线程-程序员宅基地
- phpstudy的Apache无法启动_phpstudy apache无-程序员宅基地
- 数据泵导出出现ORA-31617错误-程序员宅基地
- java基础巩固-宇宙第一AiYWM:为了维持生计,两年多实验室项目经验之分层总结和其他后端开发好的习惯~整起_java两年经验项目-程序员宅基地