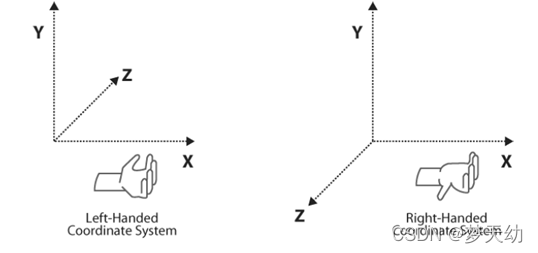
坐标系右手坐标系:把右手拇指食指中指伸直并正交,拇指X,食指Y,中指Z。一般无特殊说明,都是右手坐标系。右手坐标系的旋转正方向:从轴的正方向看向原点,逆时针方向即是旋转正向。或者,伸出右手,拇指指向旋转...
”右手坐标系“ 的搜索结果
unity使用的是左手坐标系,3d max使用的是右手坐标系 在世界坐标系中,物体自身的坐标不一定需要与世界坐标系重合 物体自身在世界坐标系中已经做了旋转,所以旋转坐标系就可以达到旋转物体的物体...
左手拇指向右,食指向上,其余手指向前,...右手坐标系使用右手类似。 判断一个坐标系是左手还是右手,左手将拇指沿 +x 轴,食指沿 +y 轴,如果其他手指向 +z 轴,则该坐标系就是左手坐标系,否则为右手坐标系。
右手坐标系; 以像主点o为坐标系的原点; 与框标坐标系存在着坐标原点简单平移的关系 (二)像空间坐标系(S-xyz) z=-f (三)空间辅助坐标系(S-XYZ) 右手坐标系; 坐标原点:某一摄影中心S;X轴:与航线方向一致...

我觉得首先我们要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v)、图像物理坐标第(x,y)、相机坐标系(Xc,Yc,Zc)和世界坐标系(Xw,Yw,Zw). 二、图像坐标:我想和世界坐标谈谈 玉米将在这...
...计算机视觉领域中常见的四个坐标系:像素坐标系、图像坐标系,相机坐标系,世界坐标系。 像素坐标系(u,v)(u,v)(u,v) 图像坐标系(x,y)(x,y)(x,y) 相
在计算机中通常使用的是左手坐标系,而数学中则通常使用右手坐标系。 坐标系转化 如果将右手坐标系中,Z轴翻转(转向负方向)。如果不将X,或Y轴其中某一轴也进行翻转。就会使坐标系发生变化(右手坐标系转为左手...
转载:... 打开blender创建一个立方体。 ...切换到“自身”坐标系,旋转物体坐标轴也会跟着旋转。 切换到“全局”坐标系,物体无论怎么旋转坐标轴依旧与世界坐标一样。 ...

在3D模型坐标系中,z方向前向如果是负值,我们称为右手坐标系,如果是正值,我们称为左手坐标系。在3DMax中使用了右手坐标系,Unity使用了左手坐标系。 世界坐标系: 系统的绝对坐标系,在...
为了使映射有效,Jacobian 应该在整个域中具有相同的符号,即对于从右手坐标系到右手坐标系的变换,Jacobian 应该大于零。 当雅可比变为零时,映射不能是一对一的,逆变换不再存在。 实际上,雅可比可以用作网格...

原文: ... 和某同学讨论起这个 说服不了 就写了个简单的推导 顺手贴上来 长草好久好久好久了 假定Sz是一个缩放矩阵,能把z取反,也就是 Sz = 1 0 0 0 1 0 ...P = (x,y,z),P' =
1. matlab中的三维坐标系matlab中的三维坐标系是使用的右手坐标系;输入以下代码:>> plot3(0,0,0)>> xlabel('axis X')>> ylabel('axis Y')>> zlabel('axis Z')可以看出是个很明显的右手...
详解Unity中的各种坐标系
标签: unity



何淼摘要:该文以FANUC工业机器人为例,从工具坐标系设置的意义出发,分析了不同机器人设置工具坐标系的方法,成功建立了机器人新的工具坐标系,为机器人精确的运动控制奠定基础。关键词:工业机器人;坐标系;TCP中图...

作为一名智驾HIL工程师,需要学习的东西还是不少的,有错误的地方,欢迎大家指出,一起完善文档。
发射坐标系是指:原点O:在OX轴:在发射点水平面内指向发射瞄准方向OY轴:沿发射点的向上OZ轴:与OX轴、OY轴构成右手直角坐标系的坐标系。
在工业现场当中,相机拍摄到的图像有一个相机坐标系,而机器人自身也有一个机器人自身的坐标系,两者互相独立;当我们通过相机进行对物体进行拍摄,通过模式识别得到了目标物体在相机坐标系下的坐标位置,那么如何...
其实map和base_link都很好理解,一个是绝对坐标系,另一个是以机器人自身为原点的坐标系,很容易懂。 唯一麻烦的就是odam,里程计坐标系。 下面就以我的拙见尝试小白化地解释一下这个玩意儿。 首先,我们制定机器人...
开发过程中,遇到了模型颠倒和纹理错位等现象。 由于一个人搞确实太累,还要为老板做事,那是必须做的事情,所以有时候思考问题不到位,曾几何时竟然还怀疑过discreet 当然我最怀疑的是汉化版的翻译问题,最后...
坐标系是为了确定机器人的位置和姿势而在机器人或空间上定义的位置指标系统,坐标系分为关节坐标系和直 角坐标系,直角坐标系遵循右手法则,而关节坐标系则是以机器人每个轴所转动的角度来表示机器人当前的位置。
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地