
”单目3D目标检测“ 的搜索结果
在这项工作中,提出了一种名为 UniMODE 的统一单目 3D 物体检测器,其中包含多种精心设计的技术,可以解决统一 3D 物体检测中观察到的许多挑战。所提出的检测器在 Omni3D 基准上实现了 SOTA 性能并呈现出高效率。...
MV3D论文阅读

作者:大森林 | 来源:3DCV在公众号「3DCV」后台,回复「原论文」可获取论文pdf添加微信:dddvision,备注:自动驾驶,拉你入群。文末附行业细分群近年来,基于极坐标的表示方法在感知任务中表现出良好的应用前景。...







与2D目标检测不同,3D目标检测是使用RGB图像、RGB-D深度图像和激光点云,输出物体类别及在三维空间中的长宽高、旋转角等信息的检测。1简介目标检测是计算机视觉领域的传统任务,与图像识别不同,目标检测不仅需...

3D目标检测——室外1. Associate-3Ddet: Perceptual-to-Conceptual Association for 3D Point Cloud Object Detection2. Structure Aware Single-stage 3D Object Detection from Point Cloud3. PnPNet: End-to-End...

基于视频(不使用激光雷达)的3D目标检测,利用视频中目标的运动信息,性能达到SOTA。 Kinematic3DObject Detection in Monocular Video 作者 |Garrick Brazil, Gerard Pons-Moll, Xiaoming Liu, Bernt Schiele 单位...
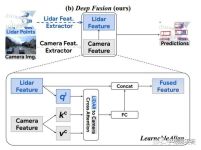
基千此, 论文分别采用激光雷达点云数据和单目相机图像数据, 结合深度学习方法, 围绕激光雷达点云和单目图像分别进行三维目标检测任务,并进行了理论分析、 方法验证、 结果分析等工作, 主要研究内容如下: ...

在 MMDetection3D 中,不同的任务和不同的场景(室内或室外)的数据预处理都会存在一定的区别,如上图所示,会产生不同的预处理后的文件,便于后续训练。,由于室内点云较为密集的特点,通常会进行点云的下采样处理...




文末附行业细分群1、导读现有的3D物体检测方法通常需要使用完全注释的数据进行训练,而使用预训练的语义特征可以带来一些优势。然而,目前还没有利用扩散特征进行3D感知任务的研究。因此,我们提出了一种新的框架,...
yolov5单目测距+速度测量+目标跟踪 。算法介绍和代码配对


推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地