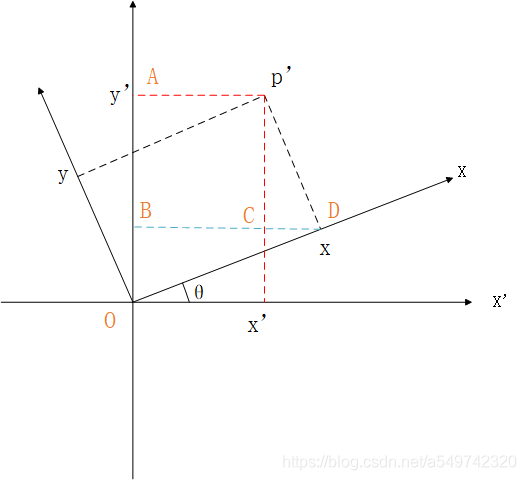
二维坐标系的变换分为旋转变换和平移变换。 一、旋转变换 假设已知基坐标系XOY中的一点P(x,y),坐标原点为O,绕点O旋转θ,可以求得点P在新坐标系X'OY'中坐标值(x',y'),如下图所示: 求解x'和y'的关键是...
”二维坐标系变换“ 的搜索结果

基于MATLAB的二维坐标系变换
标签: 首发论文
基于MATLAB的二维坐标系变换,陈兆林,张书毕,利用MATLAB的Delaunay函数功能将整个测区内的已知控制点连成三角网并计算各个三角形区域内的坐标转换参数,利用不同三角形区域内的转�

网上具体推导的例子有很多,这里就不进行推导,只说明使用什么样的变换矩阵...变换前和后的坐标系 上面黑色坐标为变换前的坐标系,蓝色坐标为变换后的坐标系,旋转角度为(逆时针方向为正,顺时针为负) 有 : ...
2.3.3 基本二维变换基本二维变换有比例变换(Scaling)、旋转变换(Rotating)、错切变换(Shearing)和平移变换(Translating)。1)比例变换比例变换就是将平面上任意一点的横坐标放大或缩小S11倍,纵坐标放大或缩小S22倍,...
二维坐标系的转换 二维坐标系的变换分为旋转变换和平移变换。 一、旋转变换 二、平移变换 三、旋转平移变换


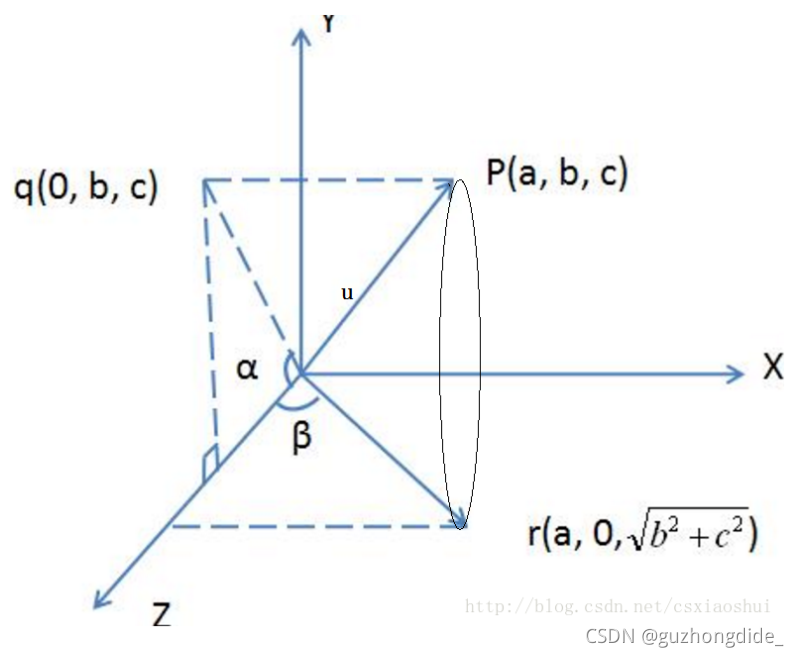
二维与三维坐标系转换
标签: 坐标转换
坐标转换

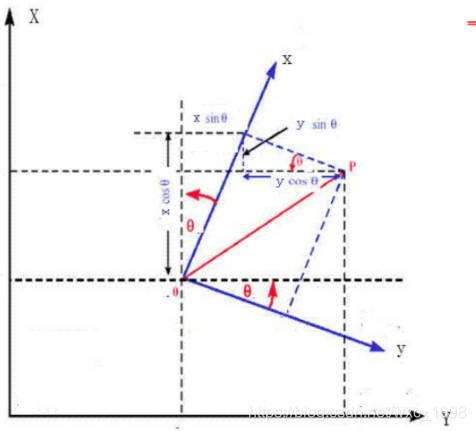
对于以前数学学习不好的人来说,在机器人的坐标变换里,总是各种蒙。 这个图片来给你解答 机器人坐标系变换 坐标变换-旋转部分 二维坐标旋转的向量和几何表示
勘探剖面是矿山设计、生产过程中的基础性成果图件,在矿山三维建模中发挥着重要作用,其中勘探剖面从二维坐标系向三维坐标系的转换及其误差分析、校正是矿山三维建模的一个重要环节。针对当前人工或交互式勘探剖面...
坐标转换矩阵 什么是坐标转换矩阵 坐标转换矩阵就是指将两个点之间的仿射关系以转换矩阵的形式表现出来,也就是通过转换矩阵作用于原始点的坐标,得到 ...
简单的一些二维坐标系构建数学模型
标签: 其他


二维坐标转换MATLAB源代码
标签: 坐标转换
实现任意二维坐标系之间的相互转换,包括直接法与最小二乘法优化两种方法。注释详细,同时可以参考博主博客解析 https://blog.csdn.net/wxc_1998/article/details/118853843
【坐标系转换参数拟合】根据坐标系A下点(x,y)坐标和坐标系B下其对应目标点坐标(X,Y)之间的关系,最小二乘确定坐标系间的转换参数;【坐标变化】人为给定坐标系A与C之间的转换参数,将坐标系A下已知点位坐标转换到...
如下图, 在2维坐标上,有一点p(x, y) , 直线opの长度为r, 直线op和x轴的正向的夹角为a。 直线op围绕原点做逆时针方向b度的旋转,到达p’ (s,t) s = r cos(a + b) = r cos(a)cos(b) – r sin(a)sin(b) (1.1) t = r ...
存在两个坐标系,同一个点在两个坐标系下的表示关系 坐标变换 1. 基坐标系转到自定义坐标系 基坐标系下有一个点,点为(x,y),自定义坐标系相对于基坐标系先绕原点O旋转角度为θθθ,再平移(xT,yTx^{T}, y^{T}xT,...
在使用长广溪机器人画画时,由图像处理得到素描图,将素描图截断为若干段坐标簇,我需要将接受到的图像坐标系下的点簇转换为机器人坐标系下的点,即完成由图像坐标系到机器人坐标系之间的转换。这里借用了OpenCV的...
x'=x·cos(θ)+y·sin(θ) y'=y·cos(θ)-x·sin(θ) 绕坐标原点逆时针旋转θ,上式θ值为正,顺时针旋转θ,上式θ值为负。
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地