创立PerceptIn之前在百度美国研发中心工作,负责无人车系统架构及产品化。 张伟德,百度美国研发中心高级架构师。曾在弗吉尼亚大学网格计算小组担任研究员,在Yahoo!、微软等公司负责大型分布式搜索构架设计。目前...
”【无人驾驶系列】基于ROS的无人驾驶系统“ 的搜索结果
参加 2018 AI开发者大会,请点击 ↑↑↑作者:申泽邦(Adam Shan),兰州大学在读硕士研究生,主要研究方向无人驾驶,深度学习;兰大未来计算研究院无人车团队负责...
分享【无人驾驶系列】基于ROS的无人驾驶系统 ppt教材
本文于来源于网络,介绍了基于机器人操作系统ROS的无人驾驶系统,并分析了它的优缺点和可靠性等知识。本文是无人驾驶技术系列的第二篇。在上篇解析光学雷达(LiDAR)技术之后,本文着重介绍基于机器人操作系统ROS的...
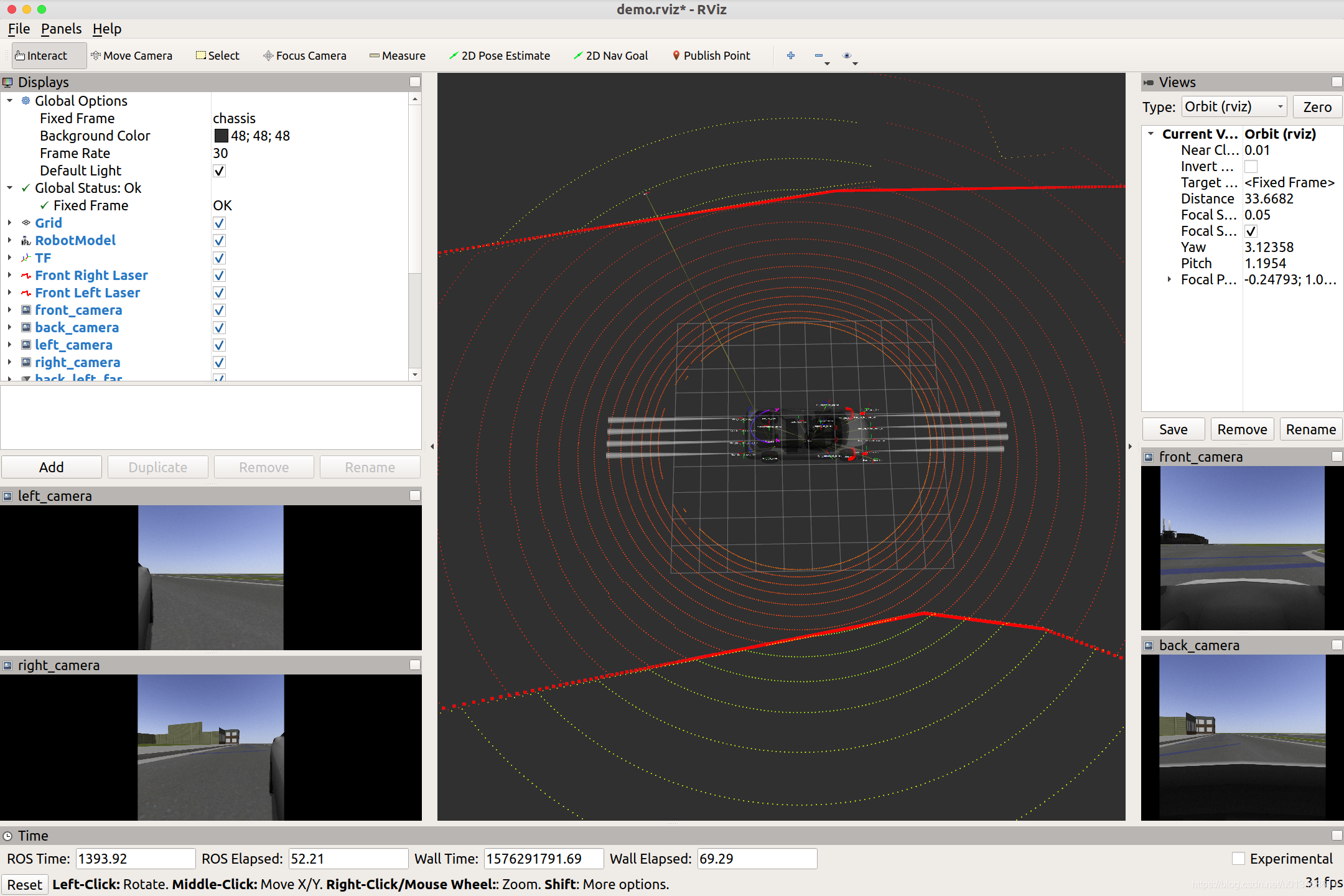
基于ROS构建无人驾驶车辆环境感知系统,文档描述对于基于ros开发有较大的帮助
本文是无人驾驶技术系列的第四篇,着重介绍基于Spark与ROS的分布式无人驾驶模拟平台。无人驾驶的安全性和可靠性是通过海量的功能和性能测试来保证的。无人驾驶系统是一个复杂的系统工程,在它的整个研发流程中,测试...
ROS操作系统,适用于智能机器人,无人驾驶等,适用于初学者阅读。
在上篇解析光学雷达(LiDAR)技术之后,本文着重介绍基于机器人操作系统ROS的无人驾驶系统。文中将介绍ROS以及它在无人驾驶场景中的优缺点,并讨论如何在ROS的基础上提升无人驾驶系统的可靠性、通信性能和安全性。 ...
无人驾驶汽车系统入门(十四)——ROS入门与实践(1) 前言:作为目前最广泛使用的开源机器人软件平台,ROS(Robot Operating System)极大的提升了机器人开发的效率。目前无人驾驶系统的实际实现仍然依赖于ROS,作为...
知识回顾 -上周我们介绍了Apollo控制技术——控制器的类型。主要介绍控制器的类型,大致分为三类,分别是开环控制、前馈环控制和后馈环控制。 其中详细地讲解了前馈环控制器的分类...自动驾驶系统包括障碍物检测、行为

(ROS),我们创建了用于交通灯检测和分类、轨迹规划和控制的节点。 超出要求 在汽车运行时重新加载 PID 参数以加快调整速度 具有多个连续行为的轨迹规划,以便轨迹规划器在低频下工作良好 RViz 可视化汽车、交通灯和...
ROS不是真正的操作系统,而是一种系统软件框架,该框架使用了流行的面向服务(SOA)的软件技术,通过网络协议将节点间数据通信解耦。一个节点是ROS程序包中的一个可执行文件,ROS节点可以使用ROS客户库与其他节点...

无人驾驶-ROS-rosbag详解 一、常用操作 1.1 录包 (1)录制所有话题: rosbag record -a (2)录制指定话题,设置 bag 包名: rosbag record -O bag_name.bag /topic1_name /topic2_name /xxx (3)录制包不设置...
毕设参考论文知识点
无人驾驶,imu,ros,matlab
purepursuit方法是基于几何追踪的路径追踪方法,基于几何的控制方法较为简单和直接,不用考虑车辆的运动学模型和动力学模型,控制时使用的参数少,能够较好的运用到实践使用中。最常用的两种方法是purepursuit方法和...

无人驾驶汽车系统入门(二十五)——基于欧几里德聚类的激光雷达点云分割及ROS实现 上一篇文章中我们介绍了一种基于射线坡度阈值的地面分割方法,并且我们使用pcl_ros实现了一个简单的节点,在完成了点云的地面分割...
推荐文章
- 计算机网络体系结构-程序员宅基地
- 韶音、南卡、Oladance开放式耳机值得买吗?多维度测评实力最强品牌-程序员宅基地
- bert简介_tensorflow 2.0+ 基于BERT的多标签文本分类-程序员宅基地
- jupyter notebook常用快捷键和语法_jupyter notebook怎么换行-程序员宅基地
- 教材编者,请多点儿“钻研”精神-程序员宅基地
- MySQL如何更改数据库名字_mysql update数据库名称-程序员宅基地
- windows上最好用的文件管理软件 Directory Opus_directory ops-程序员宅基地
- AWT图形界面设计编程——1.AWT容器_awt容器定义-程序员宅基地
- 一文看懂mybatis底层运行原理解析-程序员宅基地
- Spring Cloud Alibaba 介绍_sprngcloud alba-程序员宅基地