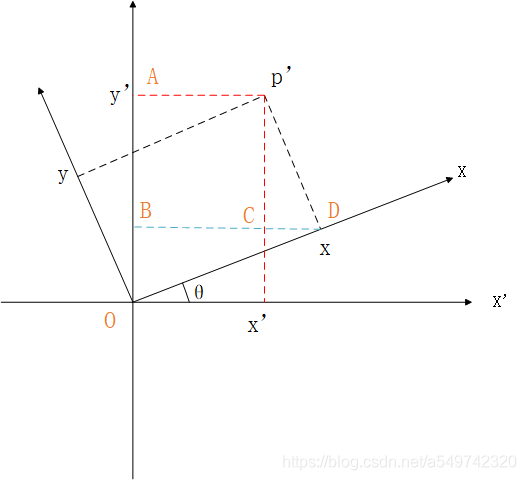
概要:三维坐标系的变换,实质上则是原点以及正交基向量的变化,在空间中表现为平移和旋转。 如图所示的坐标系变换,可以用一个变换矩阵来表示。 虽然原理也比较简单,但是大一学的线性代数已经有点忘记了。=////...
”【Scratchapixel】坐标系变换、光栅化_机长与茶的博客-程序员宅基地“ 的搜索结果
2.弹出坐标参照系选择器,过滤里输入3857(WGS84平面墨卡托投影坐标系编码)。 3.双击WGS84 / Pseudo Mercator。 4.点击ok,点击ok。 转存出的文件就是墨卡托投影的坐标系。 二、影像投影 菜单栏,处理...

平面内直角坐标系中坐标旋转变换公式今天做数字图像处理作业时遇到一个关于图片旋转变换的问题,要用到坐标的旋转变换公式,突然不记得公式是怎么来的了,于是乎,就琢磨了一番。。。首先上公式:逆时针(如下图):...
展开全部arcgis里转换坐标系的步骤如下:需要工具e5a48de588b63231313335323631343130323136353331333431346331:电脑,ArcGIS 10.01、首先我们要查看数据当前坐标系统是什么,我们点击“开始”,然后点击“ArcGIS”...
并不是做关于SLAM方向的,但由于某些任务涉及到,故作此笔记~ 相机内参矩阵: 不同的的深度摄像头具有不同的特征参数,在计算机视觉里,将这组参数设置为相机的内参矩阵C: [fx0cx0fycy001 ...


本文为基于arcgis转换经纬度和投影坐标教程以及关于它们之间关系的一点理解
0.空间描述:位置、姿态与坐标系 0.0 位置描述: 位置描述这个没什么好说的,就是用矩阵的方式表示空间坐标系中的矢量,如上图,在坐标系{A}中有矢量 aP ,其矩阵表示如下图,其数值就是矢量在当前坐标系下的模长。...

ROS中的坐标与坐标系转换
标签: 人工智能
坐标转换是一个坐标在不同坐标系下的表示,而坐标系转换不同坐标系的相对位姿关系。 ROS中机器人模型包含大量的部件,每一个部件统称之为link(比如手部、头部、某个关节、某个连杆),每一个link上面对应着一个frame...

1.柱坐标系转化为直角坐标系:柱坐标系(r,φ,z)与直角坐标系(x,y,z)的转换关系 x=rcosφ y=rsinφ z=z 2.直角坐标系转化为柱坐标系:直角坐标系(x,y,z)与柱坐标系(r,φ,z)的转换关系: r= ...

SLAM建图时的坐标系变换关系
标签: slam


地理坐标系与投影坐标系的区别
标签: 坐标系
平时开展GIS开发、研究、应用工作,总会接触到坐标系,也会遇到坐标转换的问题,如地理坐标系、投影坐标系等。 地理坐标系是球面坐标,参考平面是椭球面,坐标单位是经纬度; 投影坐标系是平面坐标系,参考平面...

三维坐标系之间的转换关系:R(旋转矩阵) 、T(平移矩阵);布尔莎模型:前提是旋转角为微小旋转角;适用于大转角的罗德里格矩阵模型;
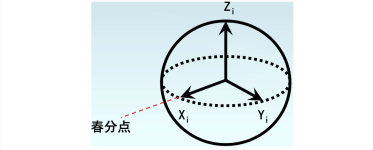
简要记录了导航中常用的坐标系和坐标转换关系,以惯性坐标系、地球坐标系、地理坐标系和载体坐标系为主。
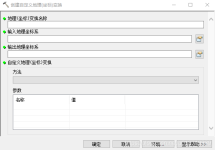
文章目录一、坐标转换问题二、软件使用说明实例一实例二实例三三、参数计算工具下载地址原文地址 一、坐标转换问题 坐标转换问题的详细了解对于测量很重要,那么请和我一起来讨论这个问题。 首先,我们要弄清楚...

在学tf坐标变换时,误以为这两个是一个意思,并且在一篇博客中看到的解释也是:两者一样,只不过在turtlebot中是叫base_footprint。 后来在一段代码中看到base_footprint到base_link的坐标变换是:0 0 0.1 0 0 0,...

推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地