1. 一些经验之谈: 一般世界坐标系到相机坐标系的变换会发生在模拟器中(典型如pybullet, unity等), 因为模拟器中的世界坐标系原点坐标是(0, 0, 0). 但真机上使用该变换就需要采用相机标定以确定相机外参 2. 相机外参...
”【Scratchapixel】坐标系变换、光栅化_机长与茶的博客-程序员宅基地“ 的搜索结果
2000坐标系,我国当前最新的国家大地坐标系...80和54都是参心坐标系,坐标原点不是地球质心,且平面坐标与高程的原点不重合,2000坐.一个地心坐标系,一个参心坐标系,椭球参数不一样,大地原点不一样等等弄清楚高斯...

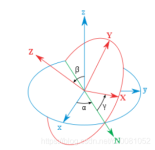
这里以常见的世界坐标系与相机坐标系间的变换为例。 一、首先介绍从相机坐标系转换到世界坐标系,也就是比较通用的body到世界坐标系间的转换。 那么旋转的欧拉角按从世界坐标系转换到相机坐...

本文介绍了CCF-CSP真题《202309-2 坐标变换(其二)》思路+python,c++满分题解,希望对你有帮助~~





高等数学笔记:三重积分下的坐标系变换
标签: 学习

极坐标变换就是将图像在直角坐标系与极坐标系中互相变换,形式如图3-26所示,它可以将一圆形图像变换成一个矩形图像,常用于处理钟表、圆盘等图像。圆形图案边缘上的文字经过及坐标变换后可以垂直的排列在新图像的...
参考: ...一共有两个机器人,一号和二号。 一号位姿 q1 = [0.35, 0.2, 0.3, 0.1]...某点在一号坐标系下坐标为p=[0.5, 0, 0.2]。求p在二号坐标系下的坐标。 假设在世界坐标系中p点的坐标为P。 用四元数做旋转则有(在Eigen
标准坐标系变换的公式为: x,y,z为初始坐标,XYZ为变换后坐标。 a1,a2,a3,b1,b2,b3,c1,c2,c3为旋转矩阵R T1,T2,T3为平移量T 将旋转矩阵和平移量放在一起,组成4*4矩阵为 这样将坐标系的变换就可以转换为...
2000国家大地坐标系简介1、关于2000国家大地坐标系的说明国家大地坐标系是测制国家基本比例尺地图的基础。根据《中华人民共和国测绘法》规定,中国建立全国统一的大地坐标系统。建国以来,中国于上世纪50年代和80...
学了ROS半年多,依旧对map坐标系、odom坐标系、base_link坐标系不是很理解,这段时间下定决心要捋清楚他们之间的关系。 map坐标系:地图坐标系,是一个固定的坐标系; base_link:机器人本体坐标系,一般和机器人的...

本文将介绍ArcGis三个需要坐标转换的场景: - Arcgis Pro设置项目坐标 - GP分析指定输出结果坐标系 - 使用python发布图层或要素服务时指定坐标系


坐标系旋转与点旋转的变换公式
标签: 坐标变换
坐标系旋转 直角坐标系 XOYXOYXOY 逆时针旋转 θθ\theta 角后变成 X′OY′X′OY′X'OY' ,原坐标系内点的坐标变化为[x′y′]=[cosθcosθsinθ−sinθ]∗[xy][x′y′]=[cosθsinθcosθ−sinθ]∗[xy] \begin{b...
火星坐标系是在GSP原始定位数据的基础上经过加密算法加密之后的定位数据所属坐标系,GSP原始定位数据所属坐标系叫WGS-84坐标系,WGS-84坐标系是美国国防制图局于1984建立的世界大地坐标系(World Geodetic System)...
[含R的最终表达式]三维空间坐标系变换-旋转矩阵 https://blog.csdn.net/fireflychh/article/details/82352710 [旋转顺序zxy]三维坐标旋转矩阵 https://blog.csdn.net/lz20120808/article/details/50809397 .....
坐标系是一个用于确定物体或点在空间中位置的图形系统。坐标系由两条相互垂直的线段组成,分别称为x轴和y轴,它们交叉于原点(0,0)处。通过在x轴和y轴上选择合适的点(坐标),可以描述出点或物体在平面上的位置。...

§1 平面直角坐标系及其变换 1.直角坐标系(笛卡儿坐标系) 坐标系:O-XY 点M(x,y),x为横坐标,y为纵坐标. 在Ⅰ、Ⅱ、Ⅲ、Ⅳ四个象限中坐标x,y的符号为: 象限 Ⅰ ...


推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地