
”ros小车“ 的搜索结果
使用ROS把各种传感器连接起来。 对动手能力要求很高。 不想被折腾的朋友,建议在淘宝买现成的套餐,半成品。 等熟练后,再买零件组装 智能小车,组装,焊接,连接电路,使用Arduino让车动起来 智能小车底盘+电机驱动...
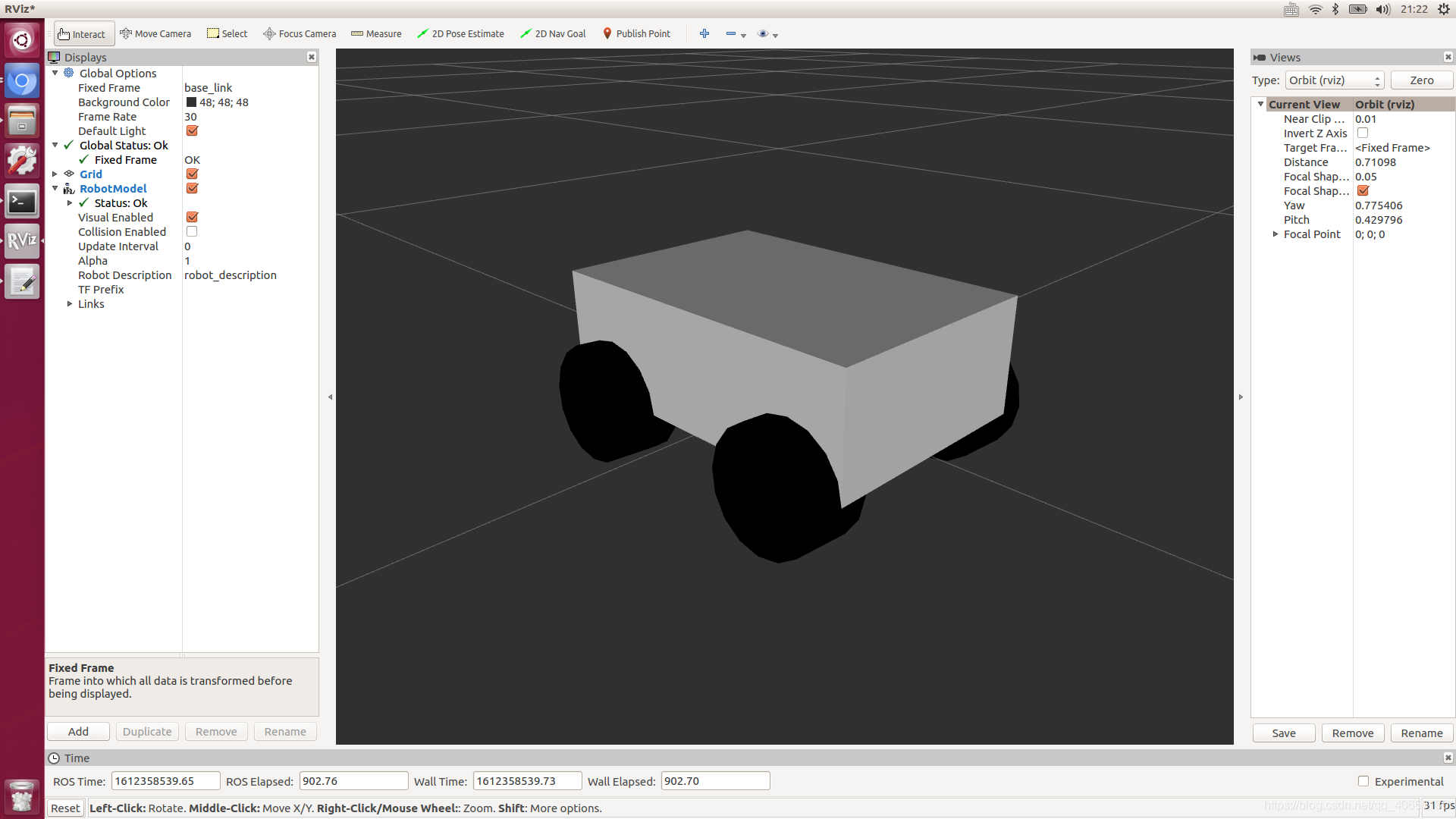
最近期间开始学习Linux嵌入式,ROS,激光SLAM,学的很杂,学的很乱,学习的过程中愈发地想造一台ROS小车,小车的最终要实现的功能是实现自动导航运动。经过一段时间的学习,已经初步实现了导航功能。下面我将记录...
由于参加学校的大学生创新训练项目,我们决定制作一款基于ROS系统的智能医疗机器人。) 决定写下此文章来记录我们的开发历程,并收集整合各种资料。
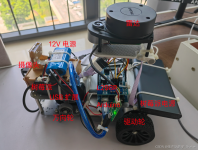
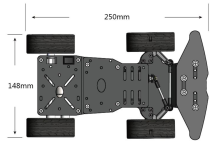
苦于资金紧张,等了好久才下决心做一个ros小车用于学习和研究。下面我会详细介绍我从头开始一步一步小车底层的计划、思路等。 ros小车方案选型 要从头做一个小车底盘,首先要了解小车底盘结构、硬件、模块等等。小车...
运行效果如下图所示,图像左边是通过cv_bridge将ROS图像转换成OpenCV图像数据之后的显示效果,使用OpenCV库在图像的左上角绘制了一个红色的圆;该例程中,一个ROS节点订阅摄像头驱动发布的图像消息,然后将其转换成...

ros&slam&智能小车
标签: 汽车
ros
通过视觉识别无人小车前进方向的障碍物 使用python脚本在ROS系统中使用
9.ROS小车视频教程
标签: ROS
9.ROS小车视频教程
ros小车的包
标签: python ROS
ros小车的一些代码,包含底层驱动,导航,建图部分。内有激光雷达驱动,使用需重新编译,可能不能用
搭建ROS小车底盘B-通过ROS利用键盘控制小车移动说明:介绍如何通过键盘控制小车运动准备工作下载串口通信的ROS包$ cd ~/catkin_ws/src$ git clone https://github.com/ncnynl/serial.git下载键盘控制的ROS包cd ~/...



一、ROS基础ROS常用关键词文件系统的概念二、环境搭建快速安装分步安装三、ROS初体验ROS串口通信主机topic通信四、ROS分布式通信规范节点通信原理话题发布话题订阅五、ROS描述文件六、启动小车底盘节点七、激光雷达...
2.6 ROS小车STM32底层控制代码 经过之前几篇文章,我相信大家一定对下面这些模块都已经有些了解了。今天,我们将编写ROS小车STM32单片机底层控制的最后一篇文章。我们将一起按照之前的软件流程,将所有的代码整合到...
在修改move_base集成的yaml文件的线速度和角速度时问题并没有解决,后来在看base_local_planner_params文件参数的注释时发现了其中一个参数(sim_time:0.8)对于这个参数的注释是小车规划未来路径的时间(单位是秒...




ROS系统内置了许多建图以及导航节点,在导航时我们通过拖拽箭头的方式实现目的地的设置,那么能不能通过程序写入一系列导航点,让小车依次沿着这些点前行呢?



【ROS小车8】_小车硬件组成
标签: ros小车

推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地