
”openpcdet“ 的搜索结果
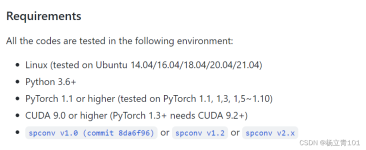
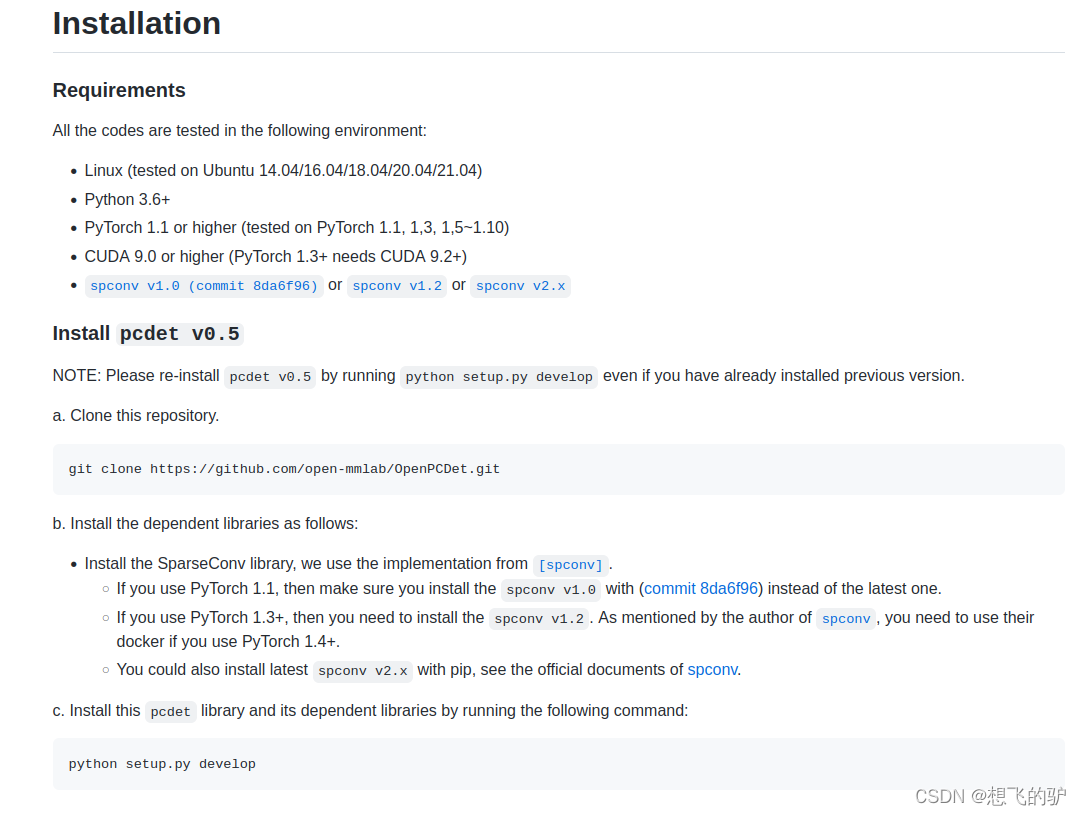
刚开始接触OpenPCDet这个库,配置环境好久都不成功,后面看到这篇博文给我提供了思路,本文主要记录一下安装过程中出现的错误。
OpenPCDet OpenPCDet是一个清晰,简单,自成体系的开源项目,用于基于LiDAR的3D对象检测。 它也是 , 和的官方代码版本。概述变更日志[2020-11-27]错误修复:如果您想使用我们提供的Waymo评估工具(请参阅 ),请...
ubuntu18.04.5配置OpenPCDet
在ubuntu系统下配置自己的openpcdet环境,并且运行其中的pointpillar例子,查看损失函数
数据预处理的过程如果报错,检查training和testing文件中的image_2中的文件数量是否与training和testing文件下其他目录中的文件数量相同,如果不同,从另一个image_2中复制一部分补齐道另一个image_2中。...
利用该算法,能实现对点云数据集的物体分割,
OpenPCDet训练三维目标检测方法
3DSSD-pytorch-openPCDet 在Pytorch中成功实施3DSSD 感谢 ! 3DSSD的此实现主要基于pcdet v0.3。 准备 克隆此存储库 安装Python依赖项。 pip install -r requirements.txt 选项:安装spconv。 请按照的说明进行。...
OpenPCDet权重文件pointpillar_7728.pth
基于OpenDet进行训练Pointpillars算法,基于tensorrt-8.5进行部署并移植到ROS
探索OpenPCDet:一个强大的3D目标检测框架 项目地址:https://gitcode.com/jjw-DL/OpenPCDet-Noted OpenPCDet 是一个开源的、基于PyTorch的三维点云目标检测框架,为研究人员和开发者提供了一个集成了最新技术的平台...

【3D目标检测】OpenPCDet自定义数据集训练
OpenPCDet权重文件pointrcnn_iou_7875.pth
本文主要对这6部分文件的数据内容进行解析讲解。
记录自己训练过程

OpenPCDet权重文件PartA2_free_7872.pth
将Openpcdet工程中的OpenPCDet/tools中的全部文件以及/OpenPCDet/pcdet(尤其注意不要遗漏pcdet文件),复制粘贴放入到src/pointpillars/tools文件夹下,最终tools中的文件如图所示。根据错误提示应该是kitti_models...
OpenPCDet是一个基于PyTorch实现的3D目标检测框架,以其模块化网络结构、复用性强、组合灵活等特点闻名,目前该框架已经支持目前已有的绝大多数面向Lidar点云的3D目标检测算法,比如voxel-based,point-based,point...
OpenPCDet新手向教程,用小项目的形式记录自定义模块、网络、loss实现训练。
在Conda虚拟环境中搭建MMdetection3d环境
报错1下载数据集太慢(外网下载且40G数据)#按照指定目录下载data ./pointpillars/data/kitti/training/# 报错 连不上ssl解决(添加代理即可,在clash打开 allow LAN )按i按esc:wq# xxx是自己电脑的地址 按 win按i...
对于OpenPCDet中模型的训练过程如下所示,在训练前一般需要进行4个部分的准备:数据准备、网络模型准备、以及优化器和学习率调度器。可以选择的优化器有:Adam、SGD、Adam_OneCycle。完整的PointPillars网络配置如上...

推荐文章
- 第十三周 ——项目二 “二叉树排序树中查找的路径”-程序员宅基地
- C语言基础 -- scanf函数的返回值及其应用_c语言ignoring return value-程序员宅基地
- 数字医疗时代的数据安全如何保障?_数字医疗服务保障方案-程序员宅基地
- 确定性随机数发生器测试向量——DRBG-HMAC-SHA1_drbg_nopr_hmac_sha1-程序员宅基地
- Apache Lucene 8.0.0 发布,Java 全文搜索引擎-程序员宅基地
- java趣事_【趣事】Java程序员最年轻,C++程序员最年老-程序员宅基地
- 用什么软件测试内存条稳定,使用内存条检测工具监测内存稳定性,内存条检测工具有哪些...-程序员宅基地
- Harmonyos 自定义下拉列表框(select)_harmonyos 下拉列表-程序员宅基地
- VBA入门到进阶常用知识代码总结44_msofalse-程序员宅基地
- 公司个人年终工作总结【10篇】_csdn 公司 年终终结-程序员宅基地