Ubuntu20.04下noetic安装ROS及cartographer安装及出现问题解决
”cartographer“ 的搜索结果
cartographer ros使用指南-调优说明:介绍如何调整cartographer相关参数,以达到更好的效果两个系统:cartographer可以被视为两个独立但相关的系统。第一个是本地SLAM(有时也称为前端)。它的工作是构建一组局部一致...



在ROS noetic上安装cartographer 文章目录在ROS noetic上安装cartographer安装测试在自己的环境中运行 记录一下在ROS noetic上安装cartographer的过程。 官方ros文档,官方文档很详细,建议看着官方文档配置。 安装 ...



目录概述安装ROS21)安装python3及colcon2) 添加ROS2的源3)安装eloquent桌面版本4)修改~/.bashrc2 安装cartographer及cartographer_ros1) 安装cartographer2) 安装cartographer_ros3. 测试cartographer1) 创建...
map_builder_bridge介绍
1.demo_backpack_2d_localization.launch增加参数-pure_localization...node name="cartographer_occupancy_grid_node" pkg="cartographer_ros" type="cartographer_occupancy_grid_node" args="-resolution 0.05 .

本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:...
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:...



移动机器人激光SLAM导航(四):Cartographer SLAM 篇
node类简要介绍
关于 LocalTrajectoryBuilder2D 有关于点云数据处理得部分已经讲解完成了,但是比较杂,比较乱,因为很多地方可能都是跳着讲解得。为了方便大家的理解,这里把相关的总要环节都复盘一下。首相再重述一下之前已经讲解...

cartographer的代码主要包括两个部分:cartographer和cartographer_ros。一、cartographer和cartographer_ros的关系cartographer_ros相当于只给我们封装了一个ROS的皮,新建了一个cartographer_node节点,但其核心的...

cartographer编译报错
标签: 机器人
问题描述:在我修改了lua文件重新编译之后,报了如下的错,翻找了一些资料也没发现问题具体在哪,报错信息不是很有价值,感觉是因为版本不匹配的问题。删除之前编译的这三个文件夹删除,重新进行编译命令。

CMakeFiles/cartographer.dir/build.make:1501: recipe for target 'CMakeFiles/cartographer.dir/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc.o' failed make[2]: *** [CMakeFiles/...
其用法和c++可以做类比,就是把 map_builder.lua 与 trajectory_builder.lua 中的配置都都加载到 lx_rs16_2d_outdoor.lua 之中。另外在 lx_rs16_2d_outdoor.lua 中还可以看到...... }其内部的参数,一般来说都是新的...
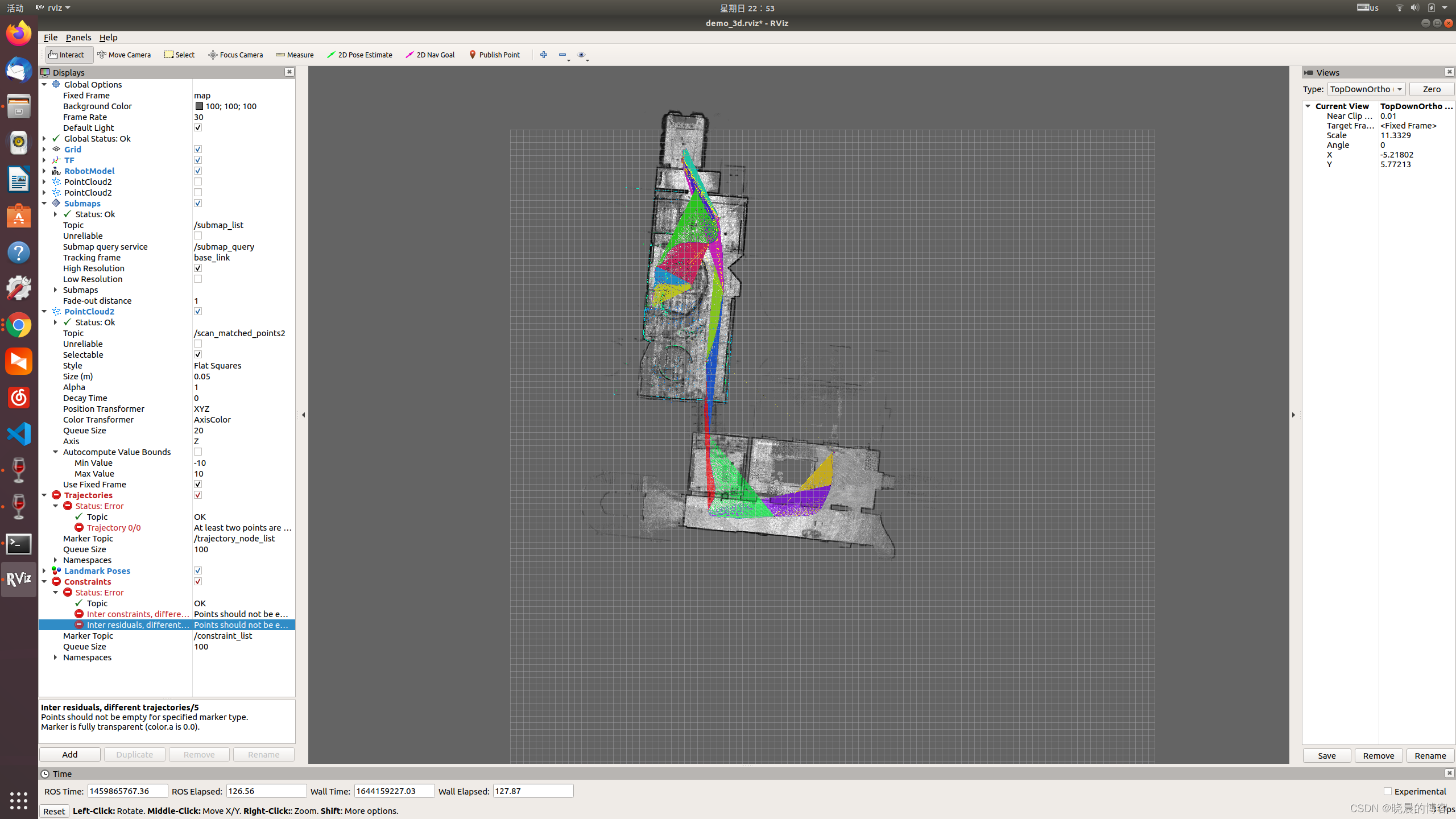
SLAM、Cartographer实时建图
推荐文章
- python判断sqlite数据库是否存在_sqlite3 判断数据库是否存在-程序员宅基地
- android多级树形列表-程序员宅基地
- 《成为一名机器学习工程师》_成为机器学习的拉斐尔·纳达尔-程序员宅基地
- Debian11-jenkins+python+allure自动化搭建_debian11 源 tencent-程序员宅基地
- JavaScript设计模式系统讲解与应用-笔记_javascript 设计模式系统讲解与应用 课程-程序员宅基地
- sepl 3.0,全方位全能型计算机语言_sepl无人编程-程序员宅基地
- java comtext_Java中的上下文对象设计模式(Context Object Design Pattern)-程序员宅基地
- lldp中与snmp相关内容agentx-程序员宅基地
- 关闭Mysql的root用户远程访问授权报错Duplicate entry localhost-root for key PRIMARY_error 1062 (23000): duplicate entry 'localhost-roo-程序员宅基地
- LeetCode 818. Race Car-程序员宅基地