由于T265停产,Intel® RealSense™ SDK 2.0 (v2.54.1) 在该版本中移除了对T265相机的支持,以后的版本也不会支持了。本文给出安装Intel® RealSense™ SDK 2.0 (v2.53.1)版本的方法,以正常使用T265。
”T265“ 的搜索结果

Ubuntu 20.04+intel realense t265 (安装Realsense SDK和Realsense-ros)
T265安装全教程
SLAM算法与工程实践——相机篇:RealSense T265相机使用(1)
对应掩码位置为1为不使用,为0为使用,所以想通过/mavros/setpoint_raw/local话题给无人机发送期望位置与偏航,type_mask赋值为0b100111111000,即可实现,注意coordinate_frame 需要赋值,一般为1,即为本地系。...
实感T265相机测试
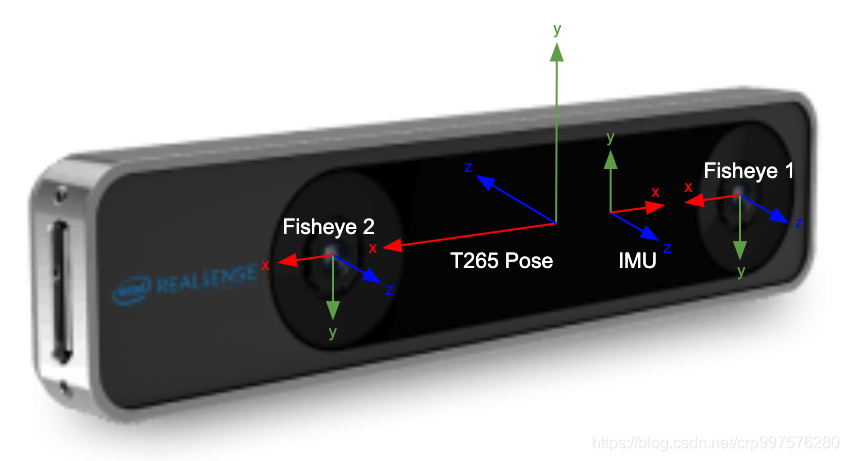
含有相机信息的话题共有三个,分别为两个鱼眼相机以及一个IMU话题。使用rviz可以查看相机相关多个坐标系信息,需要注意的是。使用该指令时不能通过roslaunch开启相机。使用TF树不能清晰表示获得的坐标信息;...
SDK已经集成了一些例子,似乎就是Github里看到的例子,可以直接用。 https://blog.csdn.net/sinat_16643223 https://blog.csdn.net/sinat_16643223/article/details/107439002
这些是用于将带ROS的英特尔实感摄像头(D400系列SR300摄像头和T265跟踪模块)使用的软件包。 此版本支持动力学,旋律和动力学分配。 要在ROS2环境中运行,请切换到。 LibRealSense2支持的版本:v2.45.0(请参阅)...
SLAM算法与工程实践——相机篇:RealSense T265相机使用(2)
硬件机载端:树莓派4B 4/8G 、T265、RPLIDAR-A2 配套开发环境: 树莓派系统Ubuntu 20.04.3 LTS RealSense SDK 2.0 ROS系统版本:noetic+realsense-ros 多平台远程登陆软件:nomachine(win10、mac、安卓、...
使用一块Jetson nano读取T265数据发送给飞控代替光流实现室内定点飞行。 1.Jetson nano数据发送 sudo apt-get install ros-melodic-serial cd ros_ws/src catkin_create_pkg fcu_serial std_msgs roscpp serial ...





因项目需要用T265跑VINS之类的算法,但网上关于realsense T265的资料较少,这两天爬了很多坑,算是把T265的标定做好了。同时也跑了VINS-Fusion(图在最下),效果算是可以吧(吗)。 1. 使用imu_uti
rosrun topic_tools throttle messages /camera/fisheye1/image...二、修改rs_t265.launch文件,位置在/home/liubo/realsense_ws/src/realsense-ros/realsense2_camera/launch。3、使用rosbag录制。一、安装好ros空间。
先看展示视频。
mainmoil_t265_cuda
标签: C
Mainmoil T265 CUDA 该项目集成了moildev库和realsense库,用户可以使用T265 / D435来控制视角。 到目前为止,我们已经在x86_64 + Ubuntu 18.04上的T265 / D435i和NVIDIA Jetson TX2上的T265上成功运行了它。 主要...
并且T265的imu到Pose的位置关系我们也是知道的,那么也可以用联合标定的方式搞定D430和T265的外参。我们可以通过单目+imu联合标定的方法,获取D430_link、t265_link、base_link之间的坐标关系,即可完成三个传感器...
Realsense T265 installation The following instruction has been tested in Ubuntu 16.04 Kinetic The library is installed in one folder and realsense ros packages are installed in workspace Step 1: ...
1. T265深度图像输出 1.1. 环境依赖 T265摄像头 python3 pip3 opencv-python pyrealsense2 1.2. 安装运行环境 安装秘钥 sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55...
Realsense T265 简单上手 实验室新买了一个相机,属于intel realsense 系列,两个单色鱼眼相机,自带IMU并配有VPU,性能强大,可以直接输出位置。就是拿来当IMU用也是不错的。 废话不多说,直接上手 系统:ubuntu...
如果你想在树莓派或者jetson nano等嵌入式设备上使用Python API获得T265的数据,需要编译pyrealsense2。 jetson nano的安装可以参考这篇文章: jetson nano 编译pyrealsense2 运行t265_I_LOVE_MCU的博客-程序员宅基地 ...
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地