”OpenPCDet“ 的搜索结果

Openpcdet 系列 Pointpillar代码逐行解析之POST_PROCESSING模块
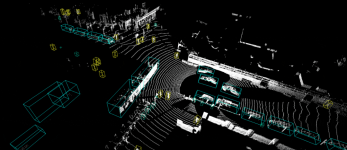
PointPillars是一种用于三维物体检测的深度学习模型,其主要思想是将三维点云数据转化为二维的BEV(Bird’s Eye View)视角下的特征图,以实现在计算上的高效性和准确性。
OpenPCDet新手向教程,用小项目的形式记录自定义模块、网络、loss实现训练。
安装openpcdet
标签: 深度学习

打开标签文件,把标签文件...以上分析了代码中的train的pkl生成过程,test,val原理相同,都是通过不同参数调用get_infos()形成,有了pkl,openpcdet框架就可以方便的调用数据进行训练了。(自定义纯点云数据集构建)
使用自己采集标注后的激光点云数据在pcdet上训练pointpillars模型的过程。
NVIDIA Jetson AGX Xavier安装OpenPCDet的完整过程,出现的问题及解决方案。

在ubuntu系统下配置自己的openpcdet环境,并且运行其中的pointpillar例子,查看损失函数
以下内容,均在linux系统上进行。下载OpenPCDet-master项目配好环境之后,首先使用python setup.py develop 调用编译代码进行编译。
Openpcdet自定义数据集训练遇到问题
Openpcdet yaml配置文件解读。
训练OpenPCDet报错
标签: 目标检测
解决方法:将配置文件中数据增强部分的 USE_ROAD_PLANE 设置为 False。
将Openpcdet工程中的OpenPCDet/tools中的全部文件以及/OpenPCDet/pcdet(尤其注意不要遗漏pcdet文件),复制粘贴放入到src/pointpillars/tools文件夹下,最终tools中的文件如图所示。根据错误提示应该是kitti_models...

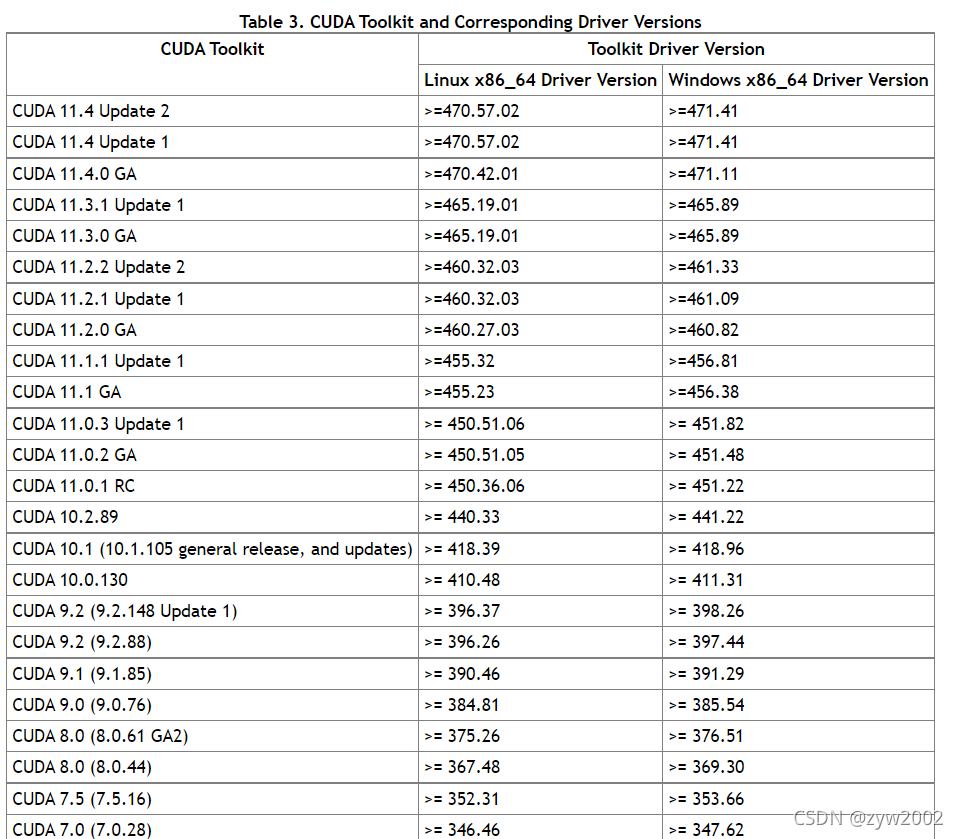
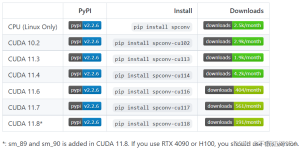
torch-1.9.0+cu111-cp38-cp38-linux_x86_64.whl和torchvision-0.10.0+cu111-cp38-cp38-linux_x86_64.whl右键复制下载链接,使用。最近在GPU服务器主RTX4090上部署了一下,折腾了一天发现就算4090安装cuda11.1按照...

Openpcdet 系列 Pointpillar代码逐行解析

NVIDIA Jetson AGX Orin配置OpenPCDet环境部署PointPillar
Openpcdet 系列 Pointpillar代码逐行解析之MAP_TO_BEV模块
推荐文章
- 【vue-treeselect+vxe-table】数据量大的时候懒加载,数据回显,输入框绑值,末级节点不要前面的箭头等问题详解_treeselect显示加载中-程序员宅基地
- 【从0入门JVM】-01Java代码怎么运行的_代码如何在jvm中运行-程序员宅基地
- TreeViewer应用实例(ITreeContentProvider与LabelProvider的使用)-程序员宅基地
- 如何将别人Google云端硬盘中的数据进行保存_谷歌网盘怎么保存别人的资源-程序员宅基地
- java中查看数据类型_java查看数据类型-程序员宅基地
- Scrapy-redis分布式+Scrapy-redis实战-程序员宅基地
- web播放H.264/H.265,海康,大华监控摄像头RTSP流方案_海康api hls怎么取265的流-程序员宅基地
- HTML详解连载(7)-程序员宅基地
- PHP使用多线程-程序员宅基地
- 由excel一键生成json的小工具(基于python,仅支持单层嵌套)_excel转json github-程序员宅基地