以ZK-500工业机器人为例整理机器人运动学、DH建模、正逆解的相关内容以及matlab代码
”DH法建模“ 的搜索结果
怎么使用6自由度机械臂做动画?


(1)Link类函数,基于DH法建模,建立其相关关系,DH法建模分改进型和标准型,Link类函数的一种用法是 R = Link([theta,d,a, alpha]),其中参数theta代表DH建模的关节角、参数d代表DH建模的连杆偏距、参数a代表...

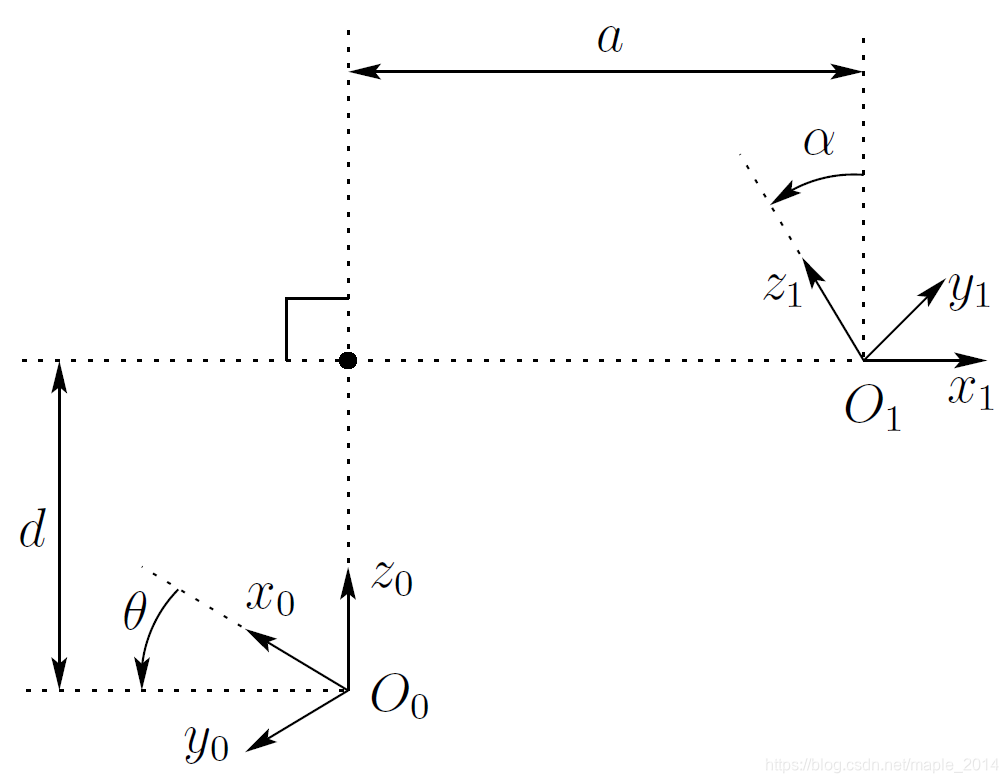
机器人运动学-DH法建模
标签: 运动学





对六自由度协作机械臂分别使用标准DH和改进DH进行建模
机械手(七自由度)D-H建模、正运动学分析与轨迹规划

前两天我们导师让我基于DH方法在ROS上建模,但我搜了一下发现都是用MoveIt!...涉及到DH参数法的基本上都是用matlab实现的,所以ROS可以用DH参数方法建模吗?还是说就是用建立urdf方法来建模的</p>

本文我们分别用SDH法和MDH来给同一个机器人模型建模,感受一下两种建模方法在串联机械臂里面的应用。 所用平台:Matlab ...这是因为这里的Tool frame不能用DH法 2.尝试用标准DH建模 2.1 首先建系 我们按照标准D...
SDH建模。


(matlab)基于DH参数法的机械臂正运动,逆运动,以及轨迹规划代码,有注释,适合新手



机器人学——标准DH建模
标签: 机器人


Peter Croke著《机器人学、机器视觉与控制》里使用的是标准的DH建模,John J.Craig著《机器人学导论》中使用的是修正后的DH建模。关于DH建模的基础理论知识此处不做介绍,此文只包括在建立DH表时的两种DH建模...
List item 这里写自定义目录标题欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定...
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地