”Categrapher“ 的搜索结果
ROS cartographer安装
标签: 其他
1. 安装工具: sudo apt-get update sudo apt-get install -y python-wstool python-rosdep ninja-build 2. 下载或者复制代码包 mkdir catkin_ws cd catkin_ws wstool init src wstool merge -t src ...

在ubuntu20.04系统下安装cartographer的一些踩坑经历及相关解决方法
Cartographer总结(二)-代码框架及算法流程 本文从/scan传递的信息流帮助大家找到算法的入口,在找算法入口的同时可以帮助理解代码框架。在ROS环境中跑cartographer一般包含cartographer和cartographer_ros两个库...

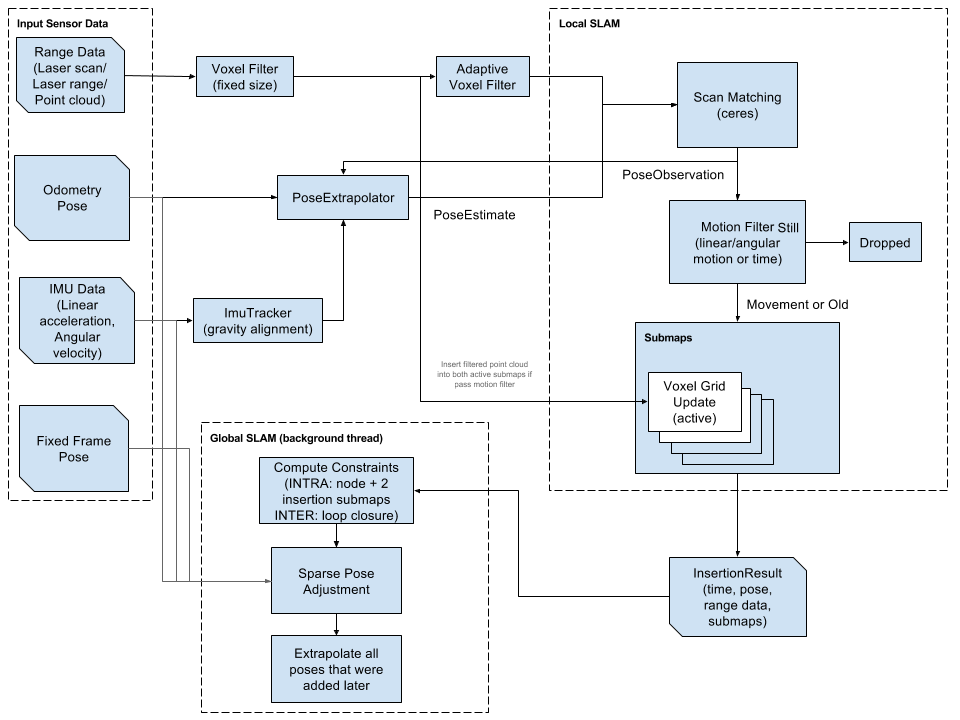
cartographer算法流程 首先输入是激光,imu,odom数据,总体分为前端和后端 前端定位和建图流程如下 总的定位和建图从GlobalTrajectoryBuilder::AddHorizontalLaserFan开始运行 局部定位和建图从...
cartographer错误解决
1、平台 硬件平台:中继四轮电机底盘(结合IMU提供校准确的odom数据),velodyne16线激光雷达 (只取其远距离的单线数据scan) 软件平台:ubuntu18.04下ros系统 2、配置文件 见cartographer建图(1) ...
1>启动gazebo roslaunch mbot_gazebo view_mbot_with_laser_gazebo_suyunzzz_world.launch 2>启动cartographer roslaunch cartographer_ros cartographer_demo_rplidar.launch ... Co...
cartographer安装的常见错误CMAKE_CXX_FLAGS错误protoc 版本错误解决办法:pcl相关错误一错误二 CMAKE_CXX_FLAGS错误 把错误信息完整打到error1.log catkin_make_isolated --install --use-ninja >...
官方安装步骤太复杂,而且容易失败 以下安装全部从hitcm大神的github下载,源码一样只是编译文件有所修改,亲测ubuntu16 ros kinetic一次成功 感谢hitcm 大神的无私分享 1.安装所有依赖项 ...
cartographer的纯定位模式需要使用已知地图。2、在launch文件中加载地图,并删除生成地图节点。1、启动纯定位配置_location.lua。5、修改MakeList.txt。4、创建定位数据发布节点。
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地