作者丨柒柒@知乎来源丨https://zhuanlan.zhihu.com/p/458068647编辑丨3D视觉工坊这篇文章主要是梳理一下近期3D Detection的进展,分类列举出一些...
”3D视觉从入门到精通“ 的搜索结果


作者:泡椒味的口香糖| 来源:3D视觉工坊在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf和代码链接添加微信:dddvisiona,备注:3D点云,拉你入群。文末附行业细分群0. 笔者个人体会实例分割是CV领域很...
作者:PCIPG-Jing | 来源:3DCV,投稿入口添加微信:cv3d007,备注:三维点云,拉你入群。文末附行业细分群。1 什么是点云配准点云配准指的是输入两幅点云 Ps (source) 和 Pt (target),输出一个变换矩阵T(即旋转R...

写在前面感谢「3D视觉从入门到精通」知识星球小伙伴的分享。本课件为慕尼黑工业大学沉淀数年的3D Vision精品课件,Computer Vision(全) & Visual Navigation(部分)获取方式点击下方卡片,关注公众号「计算机...


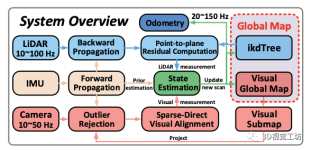
VIO-SLAMVisual-Inertial Odometry(VIO)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IM...



自从在ECCV'20被提出以来,NeRF(神经辐射场)在3D视觉领域激发了很多有趣的创新工作,同时也出现了很多优秀的开源工作,本文对近期(2020-2023)的NeRF相关典型的开源代码库和框架做一个盘点,涵盖静态场景、动态.....
作者丨慕弋云子@知乎来源丨https://zhuanlan.zhihu.com/p/455897310编辑丨3D视觉工坊本文已被收录在单目3D目标检测的综述文章中。如果你对单目3D目标检测...
写在前面首先,祝大家国庆、中秋节快乐,感谢大家对工坊的一路陪伴与支持!近一年来,工坊茁壮成长,以3D视觉为切入点,逐渐成为一个集干货、咨询、学业、工作为一体的技术交流平台!为了回馈那些和...
微信公众号推荐【3D视觉工坊简介】公众号【3D视觉工坊】,致力于3D视觉算法、SLAM算法、三维重建、点云处理、深度学习、目标检测、语义分割、自动驾驶感知算法等领域的技术传播,注重内容的...


点击上方“3D视觉工坊”,选择“星标”干货第一时间送达前言:在计算机视觉方向,数据增强的本质是人为地引入人视觉上的先验知识,可以很好地提升模型的性能,目前基本成为模型的标配。最近几年逐渐出...
本文为PCL点云数据处理基础专栏的目录,持续更新!



推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地