
”3D视觉从入门到精通“ 的搜索结果

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达前言加入工坊快一年了,这一年里结识了很多优秀的童鞋,他们是一群对技术充满着好奇心的探索者。不知道为什么,一旦碰到难题,大家显得格外团...
Clion从入门到精通
标签: clion
文章目录前言一 Clion从入门到精通1.1 Clion学习资源:1.2 clion的配置文件1.3 好用的插件 前言 由于项目中经常会使用clion作为程序开发ide, 这里简单将自己对于clion的一些使用技巧,简单做个总结,方便以后回顾。...


点上方蓝字Python人工智能与深度学习社区获取更多干货在右上方···设为星标★,与你不见不散本文来源学习笔记文章目录图像处理计算机视觉OpenCV网页OpenCV可应用的领域Ope...
星球内经常会发布一些项目承接,只对星球成员开放,篇幅有限列举部分如下欢迎大家扫码加入我们的知识星球,共同学习进步!真正的高手,都是向内卷。欢迎扫码加入一起学习!(更多内容星球内查看,篇幅有限,以上仅为...
与文本提示相比,找到最佳的提示词来生成完美的图片并没有那么成熟。这可能是因为创建对象自身的挑战,这些对象基本上是主观的并且往往缺乏良好的准确性度量方法。本指南涵盖了基本的图像提示技术,并且我们强烈建议...
(1)没有高深理论,每章都以实例为主,读者参考书中源码运行,就能得到与书中一样的结果。(2)专注于Python数据分析与可视化...《Python数据分析与可视化从入门到精通》以"零基础”为起点,系统地介绍了Pyth...

(1)没有高深理论,每章都以实例为主,读者参考书中源码运行,就能得到与书中一样的结果。...《Python数据分析与可视化从入门到精通》以“零基础”为起点,系统地介绍了Python在数据处理与可视化分析方面...
写在前面我们在「3D视觉从入门到精通」星球里已经为大家梳理了以下一些内容:(一)3D视觉学习路线(二)线上视频课程(三)3D视觉顶会|期刊(四)精华github资源(五)往期帖...




在 3D-BoNet 中由于 3D 点云本身包含了每个物体的几何信息,在输入点云数据。二是相比较基于候选目标框,分割框架—3D-BoNet,它可以实现对三维点云目标物的实例分割,同时为进一步检。3D-BoNet 的实现思想较为好...
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上...


通过滑动窗口的方法,在相邻多个位姿之间建立位姿约束,能够克服较为剧烈的运动场景,仅使用单帧激光点云来获得特征点的深度,虽然摆脱了对运动估计的依赖,但是精度较低。取特征点,在系统的状态量中引入了尺度因子...


线激光扫描系统采用标准安装方式,原理基于直射式激光三角法,激光投射方向和...高度方向一致,投射到被测物体表面形成漫反射,被图像传感器接收形成像点,当沿着激光 束方向移动时,图像传感器像点发生移动,利用平
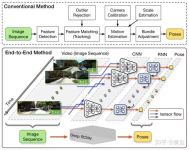
而为网络的输出生成一个逐点的连续置信图,该框架并行处理图像和稀松的深度图,法,这种方法虽然能够得到目标识别的结果,但却丢失了点云中最重要的深度信息,到各种障碍物的距离、相对速度等数据,再根据运动传感器...
推荐文章
- cocos creator 实现截屏截图切割转成 base64分享--facebook小游戏截图base64分享,微信小游戏截图分享【白玉无冰】每天进步一点点_cocos上传base64-程序员宅基地
- Docker_error running 'docker: compose deployment': server-程序员宅基地
- ChannelSftp下载目录下所有或指定文件、ChannelSftp获取某目录下所有文件名称、InputStream转File_channelsftp.lsentry获取文件全路径-程序员宅基地
- Hbase ERROR: Can‘t get master address from ZooKeeper; znode data == null 解决方案_error: can't get master address from zookeeper; zn-程序员宅基地
- KMP的最小循环节_kmp求最小循环节-程序员宅基地
- 详解ROI-Pooling与ROI-Align_roi pooling和roi align-程序员宅基地
- Imx6ull开发板Linux常用查看系统信息指令_armv7 processor rev 2 (v7l)-程序员宅基地
- java SSH面试资料-程序员宅基地
- ant design vue table 高度自适应_对比1万2千个Vue.js开源项目发现最实用的 TOP45!火速拿来用!...-程序员宅基地
- 程序员需要知道的缩写和专业名词-程序员宅基地