点击上方“3D视觉工坊”,选择“星标”干货第一时间送达一、SA-SSD在bird's eye view任务中,效率与精度并存的SA-SSD论文:http://www4.comp....
”3D目标检测“ 的搜索结果
平均准确度AP是目标检测中非常重要的评价指标,本文介绍准确率、召回率,用实例讲解P-R曲线的绘制,分析了AP R11和AP R40的区别,并给出Python实现


本文转载自知乎,已获作者授权转载。链接:https://zhuanlan.zhihu.com/p/152120636随着自动驾驶与机器人技术的不断发展,基于点云表征的3D目标检测领域在近...
【导读】FAIR何恺明等人团队提出3D目标检测新框架VoteNet,直接处理原始数据,不依赖任何2D检测器。该模型设计简单,模型紧凑,效率高,在两大真实3D扫描数据集上实...

3D目标检测是自动驾驶中感知周围环境的一项重要任务,尽管性能优异,但现有的3D检测器对恶劣天气、传感器噪声等造成的真实世界的破坏缺乏鲁棒性,这引发了人们对自动驾驶系统安全性和可靠性的担忧。为了全面而严格地...
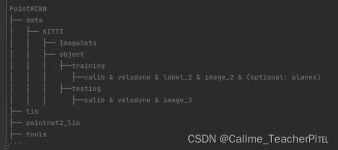
【3D目标检测】KITTI数据集
标签: 3d


基于深度学习的图像目标检测(上) 基于深度学习的图像目标检测(下) 大牛讲堂 | 基于DenesBox的目标检测在自动驾驶中的应用 前言 CNN(convolutional neural network)在目标检测中大放异彩,R-CNN系列,YOLO,SSD...

自动驾驶车辆需要持续的环境感知以获得障碍物的分布,...具体来说,3D目标检测是一个至关重要的功能模块,因为它可以同时预测周围物体的类别、位置和大小。一般来说,自动驾驶汽车配备了多个传感器,包括摄像头和激...
而目前3D检测,输入是重力方向校正的,得到的是对应完整物体的中心x,y,z,以及水平面内的夹角a,以及估计的size(s1,s2,s3); 2.6D姿态的角度范围可以是360度,但3D检测只能得到180度,因为物体旋转180度,3D包围盒...
基于YOLO的3D目标检测:YOLO-6D stone 收藏之前点个赞呗 阅读本文之前需要对yolo算法有所了解,如果不了解的可以看我的两篇文章: stone:你真的读懂yolo了吗? zhuanlan.zhihu.comstone:yolo v2详解...
基于OpenCV的使用YOLOv3进行目标检测,使用YOLO神经网络的实时目标检测代码。
MVX-Net论文阅读

©PaperWeekly 原创 ·作者|黄飘学校|华中科技大学硕士研究方向|多目标跟踪随着最近 Waymo Open Dataset Challenges 2020 的落幕,其中关于 ...
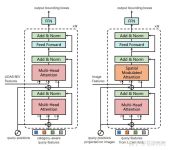
Transformer的"魔爪"已经伸向3D目标检测了。 Pointformer:用于3D点云的特征学习backbone,可结合并提高现有的3D点云目标检测网络性能,如VoteNet、PointRCNN和CBGS等。 注:文末附【Transformer】和【3D目标检测】...
MV3D论文阅读

传统的2D目标检测,是得到目标物体的类别,以及图像平面内的包围盒,因此包含的参数为类别c,包围盒的中心(x,y),长宽(length, width)。 而3D检测的任务是得到目标物体的类别(Classification)以及带朝向的3D包围盒...

推荐文章
- 记录CentOS7 Linux下安装MySQL8_适合正式环境_干货满满(超详细,默认开启了开机自启动,设置表名忽略大小写,提供详细配置,创建非root专属远程连接用户)_centos7安装mysql8-程序员宅基地
- python 读取grib \grib2-程序员宅基地
- Kimi Chat,不仅仅是聊天!深度剖析Kimi Chat 5大使用场景!-程序员宅基地
- Datawhale-集成学习-学习笔记Day4-Adaboost-程序员宅基地
- TexStudio配置以及解决无法Build&View_texstudio 无法启动 build & view:pdflatex:"d:/data/texl-程序员宅基地
- 用户空间访问I2C设备驱动-程序员宅基地
- 人脸识别算法初次了解-程序员宅基地
- maven的pom文件学习-程序员宅基地
- wamp mysql 没有启动,WAMP中mysql服务突然无法启动 解决方法-程序员宅基地
- 《树莓派Python编程入门与实战(第2版)》——3.7 创建Python脚本-程序员宅基地