”3D目标检测“ 的搜索结果

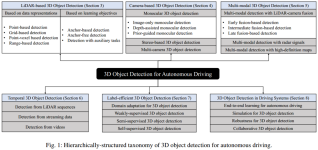
3D目标检测进展综述
标签: 2D目标检测
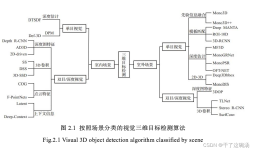
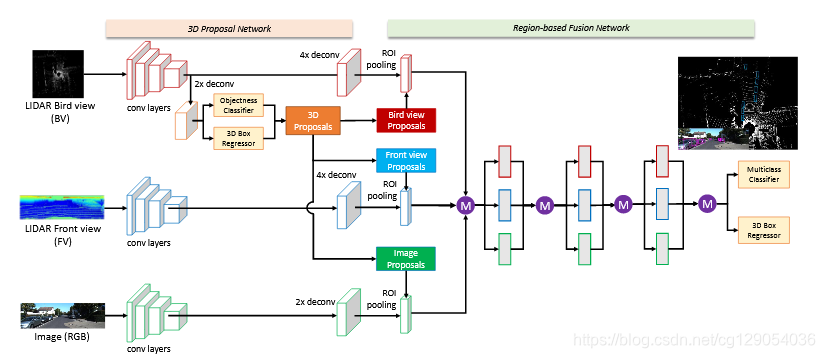
其次根据图像、激光雷达、多传感器等不同数据采集方式,分析目前具有代表性和开创性的3D目标检测算法;结合自动驾驶的应用场景,对比分析不同 3D 目标检测算法的性能、优势和局限性;最后总结了3D目标检测的应用意义以及...
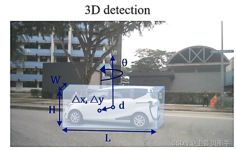
前言做为被动传感器的相机,其感光元件仅接收物体表面反射的环境光,3D场景经投影变换呈现在2D像平面上,成像过程深度信息丢失了。而当我们仅有图片时,想要估计物体在真实3D场景中所处的位置,这将是一个欠约束的...
基于YOLO的3D目标检测(激光雷达点云)课程设计

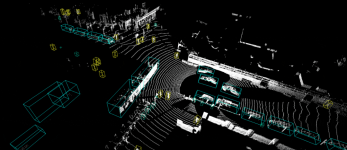
展示了使用我们的数据集,一个合理的训练三维目标检测时,可以达到较高的精度基于雷达的算法。

【lidar】3D目标检测PointPillars:论文解读、代码解读、部署实现
本文综合整理单目3D目标检测的方法模型,包括:基于几何约束的直接回归方法,基于深度信息的方法,基于点云信息的方法。万字长文,慢慢阅读~ 直接回归方法涉及到模型包括:MonoCon、MonoDLE、MonoFlex、CUPNet、...
基于python的Au实时形状感知的单目3D目标检测系统(ICCV2021).zip 计算机专业,软件工程专业,通信工程大学生课程设计 自己大三的时候写的 适合大家做课程设计,写毕业设计也可以参考 基于python的课程设计



参考: 3D检测入门知识梳理

MonoDLE作为一个延续CenterNet框架的单目3d检测器,在不依赖dcn的情况下获得了较好的性能,可以作为baseline。论文核心观点,主要包括为三点: 2d box中心点与投影下来的3d box中心点,存在不可忽视的差异,优先使用...


本文共4593字,预计需要20分钟,可以先收藏再看哦1 简介目标检测是计算机视觉领域的传统任务,与图像识别不同,目标检测不仅需要识别出图像上存在的物体,给出对应的类别,还需要将该物体的位置通过最小包围框...
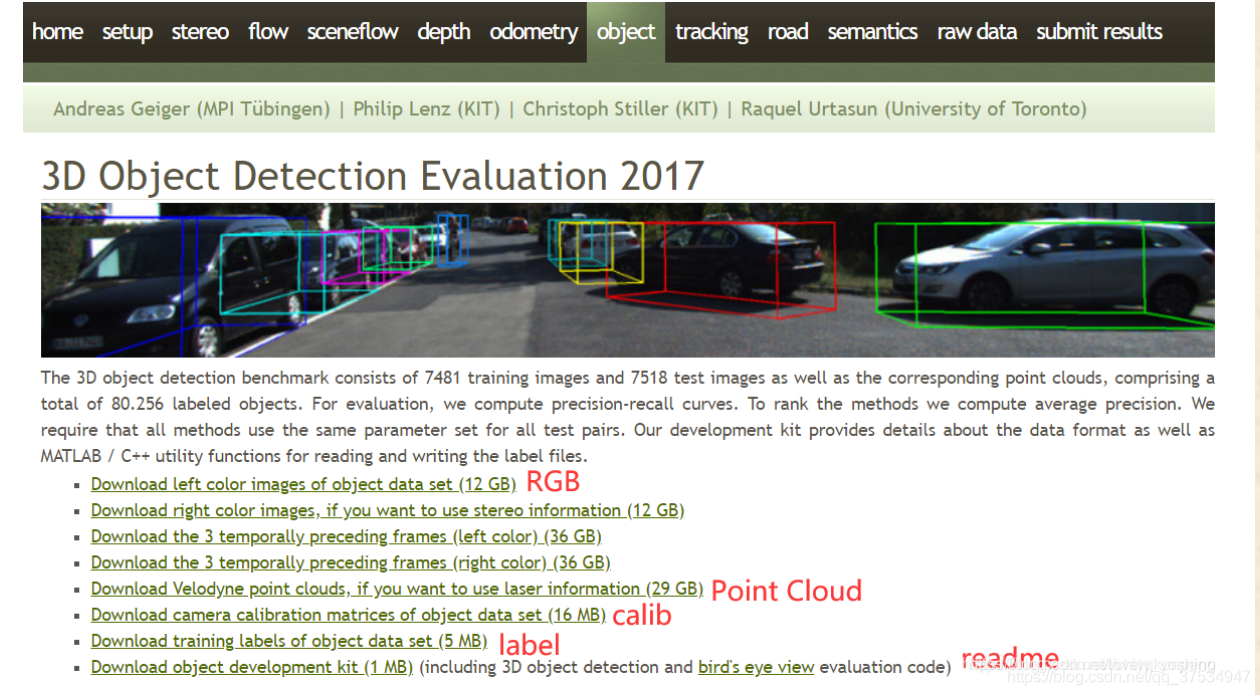
本文介绍在3D目标检测中,理解和使用KITTI 数据集,包括KITTI 的基本情况、下载数据集、标签格式解析、3D框可视化、点云转图像、画BEV鸟瞰图等,并配有实现代码。 1、KITTI数据集3D框可视化 2、KITTI 3D数据集 3、...


3D目标检测跟踪_基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化

推荐文章
- GPT-ArcGIS数据处理、空间分析、可视化及多案例综合应用
- 在Debian 10上安装MySQL_debian mysql安装-程序员宅基地
- edge 此项内容已下载并添加到 Chrome 中。_一个小扩展,解决Chrome长期以来的大痛点...-程序员宅基地
- vue js 点击按钮为当前获得焦点的输入框输入值_vue获得当前获得焦点的元素-程序员宅基地
- Android 资源文件中@、@android:type、@*、?、@+含义和区别_@android @*android-程序员宅基地
- python中的正则表达式是干嘛的_Python中正则表达式介绍-程序员宅基地
- GeoGeo多线程_geo 多线程-程序员宅基地
- phpstudy的Apache无法启动_phpstudy apache无-程序员宅基地
- 数据泵导出出现ORA-31617错误-程序员宅基地
- java基础巩固-宇宙第一AiYWM:为了维持生计,两年多实验室项目经验之分层总结和其他后端开发好的习惯~整起_java两年经验项目-程序员宅基地