目标检测不稳定分析、优化
”2D目标检测“ 的搜索结果
ConvNeXt的网络结构基于Inception-v4,但采用了更加灵活的多尺度卷积设计。具体而言,ConvNeXt将不同尺寸的卷积核组合成一个大的卷积核,从而提高感受野并减少参数数量。为了进一步降低参数数量和计算复杂度,...

1:本文主要总结近两年的部分目标检测成果2:本文通过这些研究给出学派发展方向参考3:本文针对理论基础研究进行探索性的分析4:个人目前相关工作内容的一些基本的介绍(命名实体识别,文献情报分析,摘要内容生成,...
1 两通道DPCA动目标检测原理 PDCA(Plan-Do-Check-Act的简称)循环是品质管理循环,针对品质工作按规划、执行、查核与行动来进行活动,以确保可靠度目标之达成,并进而促使品质持续改善。规划(Plan):产品可靠度...
当前使用版本opencv3.4.0,需要安装opencv_contrib surf特征点检测 surf算法为每个检测到的特征定义了位置和尺度,尺度值可以用于定义围绕特征点的窗口大小,不论物体的...#include "opencv2/xfeatures2d/nonfree.h.

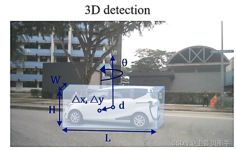
这是一篇22年的综述,介绍了3D目标检测中基于图像的检测算法。(论文中说本文是第一篇基于图像的3D目标检测算法综述!)


Pointpillars本质上是一种基于体素的三维目标检测方法。pillar英文的意思是柱子、柱状物的意思。在pointpillars模型中,体素由一系列柱状网格组成,在Z方向上仅仅只有一个体素,整体相当于一个柱子。在Z方向上只有一...

flyfish

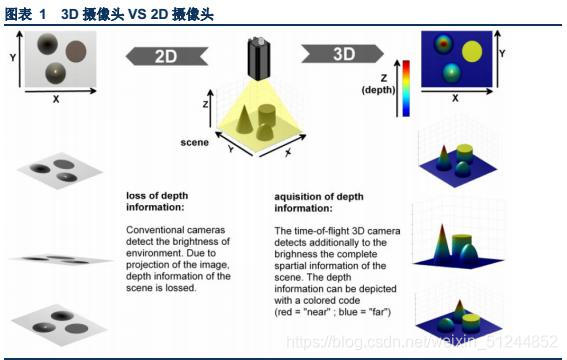




硬件传感器包括摄像机或一组摄像机,这些摄像机战略性地放置在车辆车身周围,以捕获2D视觉数据,以及一些安装在车辆顶部的雷达,以捕获3D位置数据。有一些像特斯拉这样的供应商认为,视觉数据足以让汽车识别其环境。...

碰撞检测可以说时学习Unity中最重要的一个部分,以为在游戏中,想要游戏进行交互,碰撞时非常重要的,而我在网上查了很多教程,但是都没有成功,后来经过我的仔细检查代码与修改,终于成功了



3.内容:基于2D-CFAR的雷达二维信号恒虚警检测matlab仿真。 % 对于每个时间戳,更新目标的距离(假设速度恒定) r_t(i) = initialRange + initialVelocity * currentTime; % 距离 = 速度 * 时间 td(i) = r_t(i)...
推荐文章
- JAVA—— HTML_java html-程序员宅基地
- ASP.NET版本简单的留言板的制作-程序员宅基地
- dnf时装预览怎么打开_您看我还有机会吗?被阉割的DNF时装市场系统-程序员宅基地
- Linux压缩解压tar.gz和zip包命令汇总_加压gz包命令-程序员宅基地
- c语言基础: L1-016 查验身份证_c语言检验身份照-程序员宅基地
- CI867AK01丨Modbus TCP接口模件丨3BSE092689R1-程序员宅基地
- PySide2入门--PySide2介绍与配置-程序员宅基地
- Jupyter Notebook如何调试?JupyterLab作为DeBug调试工具及调试教程_jupyterlab怎么debug-程序员宅基地
- 如何将xml转换为json_xml转json-程序员宅基地
- TCP 的那些事 | TCP报文格式解析_.tcp文件是图片吗-程序员宅基地