基于LSD的直线提取算法_lsd算法改进-程序员宅基地
LSD是一种局部提取直线的算法,速度比Hough要快。
但是有局部算法的缺点:
1.对于直线相交情况,因为设置了每个点是否USED,因此每个点只能属于一条直线,若有相交必有至少一条直线被割裂为两条。又因为其基于梯度,直线交点梯度值往往又较小(不被检测为边缘点),因此很有可能相交的两条直线在交点处被割裂为四条线段。
算法步骤概括:
1.以 s=0.8的尺度对输入图像进行高斯下采样。
2.计算每一个点的梯度值以及梯度方向(level-line orientation)。
3.根据梯度值对所有点进行伪排序(pseudo-ordered),建立状态列表,所有点设置为UNUSED。
4.将梯度值小于ρ的点状态表中相应位置设置为USED。
5.取出列表中梯度最大(伪排列的首位)的点作为种子点(seed),状态列表中设为USED。
do:
a.以seed为起点,搜索周围UNUSED并且方向在阈值[ -t, t]范围内的点,状态改为USED。
b.生成包含所有满足点的矩形R。
c.判断同性点(aligned pt)密度是否满足阈值D,若不满足,截断(cut)R变为多个矩形框,直至满足。
d.计算NFA。
e.改变R使NFA的值更小直至NFA <= ε ,R加入输出列表。
伪代码说明:
// 带有尺度参数和区域输出的 LSD 接口函数
double * lsd_scale_region( int * n_out,double * img, int X, int Y, double scale,
int ** reg_img, int * reg_x, int * reg_y )
{
double sigma_scale = 0.6 ; // Sigma for Gaussian filter is computed as sigma = sigma_scale/scale.
double quant = 2.0 ; // Bound to the quantization error on the gradient norm.
double ang_th = 22.5 ; // Gradient angle tolerance in degrees.
double log_eps = 0.0 ; // Detection threshold: -log10(NFA) > log_eps
double density_th = 0.7 ; // Minimal density of region points in rectangle.
int n_bins = 1024 ; // Number of bins in pseudo-ordering of gradient modulus.
return LineSegmentDetection( n_out, img, X, Y, scale, sigma_scale, quant,
ang_th, log_eps, density_th, n_bins,
reg_img, reg_x, reg_y );
}<p>// LSD 完整的接口函数
double * LineSegmentDetection( int * n_out,
double * img, int X, int Y,
double scale, double sigma_scale, double quant,
double ang_th, double log_eps, double density_th,
int n_bins,
int ** reg_img, int * reg_x, int * reg_y )
{
int ls_count = 0; /* line segments are numbered 1,2,3,... */</p><p>
// 角度阈值
prec = M_PI * ang_th / 180.0;
p = ang_th / 180.0; // contrario model中角度符合level-line角度阈值的概率
rho = quant / sin(prec); // 梯度阈值</p><p> // 对图像进行尺度变换
image = new_image_double_ptr( (unsigned int) X, (unsigned int) Y, img );
if( scale != 1.0 )
{
scaled_image = gaussian_sampler( image, scale, sigma_scale );
// 计算每个点的方向
angles = ll_angle( scaled_image, rho, &list_p, &mem_p, &modgrad, (unsigned int) n_bins );
free_image_double(scaled_image);
}
else
// 计算每个点的方向
angles = ll_angle( image, rho, &list_p, &mem_p, &modgrad, (unsigned int) n_bins );
xsize = angles->xsize;
ysize = angles->ysize;</p><p> /* Number of Tests - NT</p><p> improve rectangle step根据p的衰减看出运行11次,共(XY)^(5/2)种线段,得到Ntest</p><p> The theoretical number of tests is Np.(XY)^(5/2) where X and Y are number of columns and rows of the image.
Np corresponds to the number of angle precisions considered. As the procedure 'rect_improve' tests 5 times
to halve the angle precision, and 5 more times after improving other factors, 11 different precision values
are potentially tested. Thus, the number of tests is
11 * (X*Y)^(5/2)
whose logarithm value is
log10(11) + 5/2 * (log10(X) + log10(Y)). */
logNT = 5.0 * ( log10( (double) xsize ) + log10( (double) ysize ) ) / 2.0 + log10(11.0);
min_reg_size = (int) (-logNT/log10(p)); /* minimal number of points in region that can give a meaningful event */</p><p> // 搜索线段
for(; list_p != NULL; list_p = list_p->next )
{
if( used->data[ list_p->x + list_p->y * used->xsize ] == NOTUSED &&
angles->data[ list_p->x + list_p->y * angles->xsize ] != NOTDEF )
/* there is no risk of double comparison problems here
because we are only interested in the exact NOTDEF value */
{
// 找出位置相邻接且方向相近的点构成的区域
region_grow( list_p->x, list_p->y, angles, reg, ®_size, ®_angle, used, prec );</p><p> // 清除较小的区域
if( reg_size < min_reg_size ) continue;</p><p> // 构造矩形,近似该区域
region2rect(reg,reg_size,modgrad,reg_angle,prec,p,&rec);</p><p> // 检查矩形中点的密度,若小于阈值,则改进矩形表示。若仍旧不满足阈值条件,则清除该区域
if( !refine( reg, ®_size, modgrad, reg_angle,
prec, p, &rec, used, angles, density_th ) ) continue;</p><p> // 计算 NFA 值
log_nfa = rect_improve(&rec,angles,logNT,log_eps);
if( log_nfa <= log_eps ) continue;</p><p> // 找到一条新的线段
++ ls_count; // 线段数目 増一</p><p> // 补偿梯度计算时的误差
rec.x1 += 0.5; rec.y1 += 0.5;
rec.x2 += 0.5; rec.y2 += 0.5;</p><p> // 尺度变换
if( scale != 1.0 )
{
rec.x1 /= scale; rec.y1 /= scale;
rec.x2 /= scale; rec.y2 /= scale;
rec.width /= scale;
}</p><p> // 将找到的直线加入到输出变量中
add_7tuple( out, rec.x1, rec.y1, rec.x2, rec.y2,
rec.width, rec.p, log_nfa );</p><p> // 在 'region' 图像中标记出该直线
if( region != NULL )
for(i=0; i<reg_size; i++)
region->data[ reg[i].x + reg[i].y * region->xsize ] = ls_count;
}
}</p><p> // 返回结果
return return_value;
}</p>
1.尺度缩放:
按照原文,这一步可选择跳过(s =1.0)。算法的默认选择是s=0.8。目的是为了消除锯齿效应。然后用高斯下采样的方式对输入图像进行操作,其中σ =∑ /s。∑=0.6。
2.梯度和方向计算:
梯度计算中论文用到的是2*2的模板。主要是为了用contrario model的时候保证相邻点方向分布的独立性。
gx(x,y) = ( i(x + 1, y) + i(x + 1, y + 1) − i(x, y) − i(x, y + 1)) / 2
gy(x, y) =( i(x, y + 1) + i(x + 1, y + 1) − i(x, y) − i(x + 1, y)) / 2
规范化后的梯度:
g(x,y) = (gx^2 + gy^2)^0.5
梯度方向的计算:
ang(x,y) = arctan(gx(x, y) / (−gy(x, y))
这种方法计算的梯度其实是(x+0.5,y+0.5)处的,在最后的步骤会对这里的计算偏差进行补偿。
3.梯度伪排序:
梯度值越大,越是显著的边缘点,因此更适合作为种子点。但是对梯度值进行完全排序是一个时耗性很高的工作。因此简单的将梯度值划分为1024个等级(bins),这1024个等级涵盖了梯度由0~255的变化范围,这种排序是一个线性的时耗。种子点从梯度值最高的bin开始搜索,依次往下,直至所有点标记为USED。
小梯度值抑制:
小梯度值点往往出现在平滑区域,或者仅仅是噪声。不在关注的范围内,但是他们的存在往往会严重影响直线角度的计算。考虑到有角度承受范围[-t,t]。因此小梯度“脏点”的最大影响角度需要小于t。假设“脏点”的阈值为q。那么|bad ang|=q / sin(t)。这里,t被坐着设置为22.5度。因此在这里q=2。
4.直线(矩形)区域增长:
由种子点搜索角度满足并且状态为UNUSED的点(八邻域)形成的区域称为line-support region。邻域内在角度承受范围t内满足整个区域的方向角region-ang的点加入到这个区域。每次增加一个点,
reigon-ang会更新:
region-ang=arctan(∑(sin(pt(i))/ ∑(cos(pt(i))),i为region内所有的点。
直线(矩形)勾勒:
上一步后line-support region一系列相邻的离散点,需要将他们包含在一个矩形框内R,这个可以看做宽度为R的宽,长度为R的长的候选直线。R内,上一步所选择的点即为类内点(aligned pt),显然,矩形框内还很有可能包含很多上一步没有选择近line-support region的outline pt。R选择能包含line-support region的最小矩形,所有点的梯度规范化值平均计算重心。R长轴的方向设置为R的方向。
5.NFA的计算:
The validation step is based on the a contrario approachandthe Helmholtz principle proposed by Desolneux.
the Helmholtz principle:在完美噪声图像图像中不应该检测到目标。
contrario approach:一个不会检测到目标的噪声图像。对于本课题,contrario model是一个像素值为level-line angle的图像。其level-line angle随机分解为独立且服从平均分布于[0-2*PI]。
这里用NFA(Number of False Alarms)来评判observe img中某个候选Rec少于contrario model中相同位置Rec里aligned pt点的数量的概率,NFA越大,表明当前Rec与contrario model中相同位置越相似,相反的,当前rec越有可能是“真正的目标”。
其中:
NFA = N * Ph0[ k(r,I) >= k(r,i) ]
上式中,N为当前大小(m*n)图像中直线(矩形框)的数量。在m*n的图像中直线的起点和终点分别有m*n种选择,所以一共有(m*n)*(m*n)种起点和终点搭配。线段的宽度为[0,m*n ^0.5]。因此在m*n大小的图像中有(m*n)^2.5 种不同直线。
N=(m*n)^2.5
k(r,I) 为contrario model ,I 中 r 矩形里aligned pt的数量。
k(r,i) 为observe img,i 中 r 矩形里aligned pt的数量。
根据contrario model的建立规则,每个像素都服从值域为[0,2*PI]的二项分布。
设k(r,i)=k。
其中:
角度正负容忍误差为t,总容忍误差为2t。那么在contrario model中某个点为aligned pt的概率为 p=2*t / 2*Pi = t / PI。
那么,在 I 中的 r 矩形里,总像素个数为 n。I 中的 r 矩形里aligned pt个数k(r,I)大于等于k的话,可选择的值为k(r,i)、k(r,i)+1、k(r,i)......n。
概率为: ∑ p^i * (1-p)^(n-i) ,i=k,k+1,k+2……n。
因此:
NFA = (m*n)^2.5 * ∑ p^i * (1-p)^(n-i) ,i=k,k+1,k+2……n
如果NFA的值很大,认为当前事件出现在contrario model的概率很大,将其认为是背景中的一部分。相反的,认为目标是相对突出(rare)的,是一个合适的“直线”。
即:NFA <= ε
ε-meaningful rectangles :
E(ho)[ ∑NFA(r) <= ε ] <= ε , r∈ R。R为图像中所有直线的集合。E为期望运算。ho为contrario model。
根据论文,ε =1
类内点(aligned pt)密度计算

fig 1
如fig 1所示,因为t的存在且有正负号容忍范围,容易出现图中line-support region增长不合理,此时应将R截断为两个更小的R更为合适。若如图分割的区域包含的直线形成的角为钝角,本次操作只留下包含seed的一段,舍弃另一段。舍弃的点重置为UNUSED。
6.类内点密度:
d = k / n。k为类内点个数,n为R的length*width。若d > D。accepted。否则,需要将R截断。在这里设置D=0.7。文章认为这个数字既能保证同一个R中的类内点属性相近,也能保证R不会被过分的分割为小的矩形。
若没满足d > D 分割方法分为“缩小角度容忍阈值”与“缩小区域半径”的方法。
缩小角度容忍阈值:简单的将t值缩小,再次从当前R的seed开始搜寻。如果这一步仍为满足d > D,将逐步舍弃离seed较远的点,直至满足不等式未知。
类内点的计算将会解决曲线因为t的存在而误识别为直线的状况。
7.Rectangle Improvement:
如果当前的R仍旧不能满足NFA,以下的方法将对其进行改进。考虑到在有些情况下,删除line-support region中的一个点会减少R的 length-1个点(想象为对角线)。对不满足NFA的R,采取以下策略:
1.减小p=p/2
2.短边减少一行
3.长边减少一行
4.长边减少另一行
5.减小p=p/2 直至满足NFA或R过小被拒或p为原来的1/32。
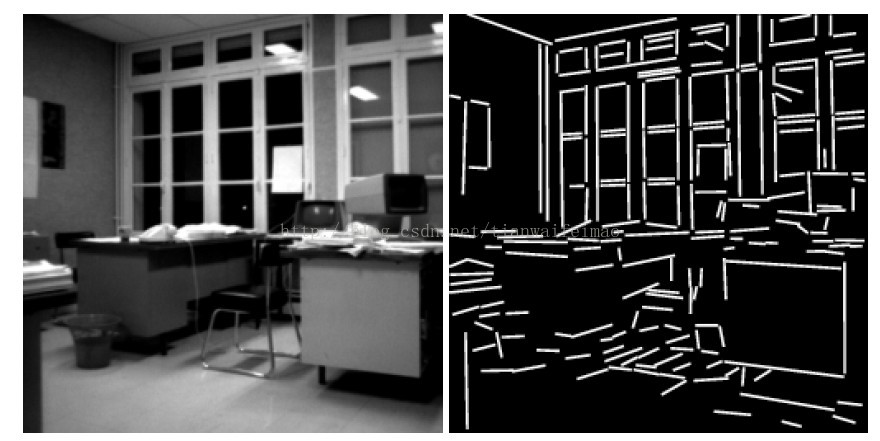
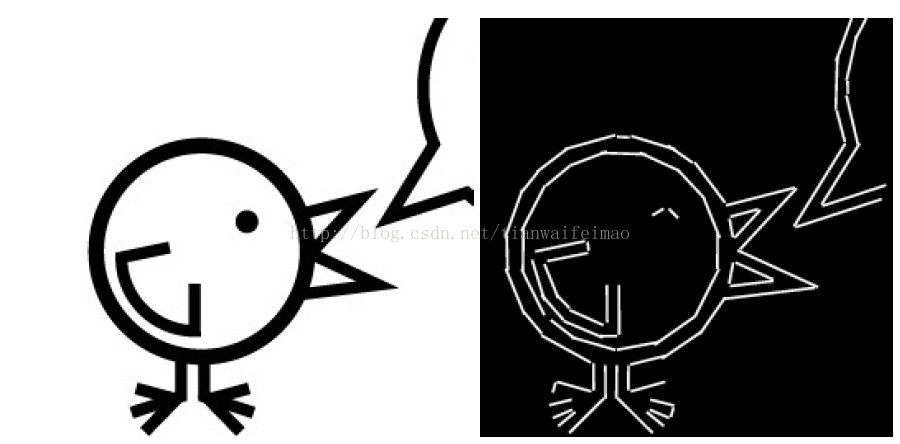
Results:
Reference:
1. <LSD :A Fast Line Segment Detector with a False Detection Control>. Rafael Grompone von Gioi.etc
2.<LSD: a Line Segment Detector>.Rafael Grompone von Gioi.etc
代码下载:
http://www.ipol.im/pub/art/2012/gjmr-lsd/
智能推荐
什么是内部类?成员内部类、静态内部类、局部内部类和匿名内部类的区别及作用?_成员内部类和局部内部类的区别-程序员宅基地
文章浏览阅读3.4k次,点赞8次,收藏42次。一、什么是内部类?or 内部类的概念内部类是定义在另一个类中的类;下面类TestB是类TestA的内部类。即内部类对象引用了实例化该内部对象的外围类对象。public class TestA{ class TestB {}}二、 为什么需要内部类?or 内部类有什么作用?1、 内部类方法可以访问该类定义所在的作用域中的数据,包括私有数据。2、内部类可以对同一个包中的其他类隐藏起来。3、 当想要定义一个回调函数且不想编写大量代码时,使用匿名内部类比较便捷。三、 内部类的分类成员内部_成员内部类和局部内部类的区别
分布式系统_分布式系统运维工具-程序员宅基地
文章浏览阅读118次。分布式系统要求拆分分布式思想的实质搭配要求分布式系统要求按照某些特定的规则将项目进行拆分。如果将一个项目的所有模板功能都写到一起,当某个模块出现问题时将直接导致整个服务器出现问题。拆分按照业务拆分为不同的服务器,有效的降低系统架构的耦合性在业务拆分的基础上可按照代码层级进行拆分(view、controller、service、pojo)分布式思想的实质分布式思想的实质是为了系统的..._分布式系统运维工具
用Exce分析l数据极简入门_exce l趋势分析数据量-程序员宅基地
文章浏览阅读174次。1.数据源准备2.数据处理step1:数据表处理应用函数:①VLOOKUP函数; ② CONCATENATE函数终表:step2:数据透视表统计分析(1) 透视表汇总不同渠道用户数, 金额(2)透视表汇总不同日期购买用户数,金额(3)透视表汇总不同用户购买订单数,金额step3:讲第二步结果可视化, 比如, 柱形图(1)不同渠道用户数, 金额(2)不同日期..._exce l趋势分析数据量
宁盾堡垒机双因素认证方案_horizon宁盾双因素配置-程序员宅基地
文章浏览阅读3.3k次。堡垒机可以为企业实现服务器、网络设备、数据库、安全设备等的集中管控和安全可靠运行,帮助IT运维人员提高工作效率。通俗来说,就是用来控制哪些人可以登录哪些资产(事先防范和事中控制),以及录像记录登录资产后做了什么事情(事后溯源)。由于堡垒机内部保存着企业所有的设备资产和权限关系,是企业内部信息安全的重要一环。但目前出现的以下问题产生了很大安全隐患:密码设置过于简单,容易被暴力破解;为方便记忆,设置统一的密码,一旦单点被破,极易引发全面危机。在单一的静态密码验证机制下,登录密码是堡垒机安全的唯一_horizon宁盾双因素配置
谷歌浏览器安装(Win、Linux、离线安装)_chrome linux debian离线安装依赖-程序员宅基地
文章浏览阅读7.7k次,点赞4次,收藏16次。Chrome作为一款挺不错的浏览器,其有着诸多的优良特性,并且支持跨平台。其支持(Windows、Linux、Mac OS X、BSD、Android),在绝大多数情况下,其的安装都很简单,但有时会由于网络原因,无法安装,所以在这里总结下Chrome的安装。Windows下的安装:在线安装:离线安装:Linux下的安装:在线安装:离线安装:..._chrome linux debian离线安装依赖
烤仔TVの尚书房 | 逃离北上广?不如押宝越南“北上广”-程序员宅基地
文章浏览阅读153次。中国发达城市榜单每天都在刷新,但无非是北上广轮流坐庄。北京拥有最顶尖的文化资源,上海是“摩登”的国际化大都市,广州是活力四射的千年商都。GDP和发展潜力是衡量城市的数字指...
随便推点
java spark的使用和配置_使用java调用spark注册进去的程序-程序员宅基地
文章浏览阅读3.3k次。前言spark在java使用比较少,多是scala的用法,我这里介绍一下我在项目中使用的代码配置详细算法的使用请点击我主页列表查看版本jar版本说明spark3.0.1scala2.12这个版本注意和spark版本对应,只是为了引jar包springboot版本2.3.2.RELEASEmaven<!-- spark --> <dependency> <gro_使用java调用spark注册进去的程序
汽车零部件开发工具巨头V公司全套bootloader中UDS协议栈源代码,自己完成底层外设驱动开发后,集成即可使用_uds协议栈 源代码-程序员宅基地
文章浏览阅读4.8k次。汽车零部件开发工具巨头V公司全套bootloader中UDS协议栈源代码,自己完成底层外设驱动开发后,集成即可使用,代码精简高效,大厂出品有量产保证。:139800617636213023darcy169_uds协议栈 源代码
AUTOSAR基础篇之OS(下)_autosar 定义了 5 种多核支持类型-程序员宅基地
文章浏览阅读4.6k次,点赞20次,收藏148次。AUTOSAR基础篇之OS(下)前言首先,请问大家几个小小的问题,你清楚:你知道多核OS在什么场景下使用吗?多核系统OS又是如何协同启动或者关闭的呢?AUTOSAR OS存在哪些功能安全等方面的要求呢?多核OS之间的启动关闭与单核相比又存在哪些异同呢?。。。。。。今天,我们来一起探索并回答这些问题。为了便于大家理解,以下是本文的主题大纲:[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JCXrdI0k-1636287756923)(https://gite_autosar 定义了 5 种多核支持类型
VS报错无法打开自己写的头文件_vs2013打不开自己定义的头文件-程序员宅基地
文章浏览阅读2.2k次,点赞6次,收藏14次。原因:自己写的头文件没有被加入到方案的包含目录中去,无法被检索到,也就无法打开。将自己写的头文件都放入header files。然后在VS界面上,右键方案名,点击属性。将自己头文件夹的目录添加进去。_vs2013打不开自己定义的头文件
【Redis】Redis基础命令集详解_redis命令-程序员宅基地
文章浏览阅读3.3w次,点赞80次,收藏342次。此时,可以将系统中所有用户的 Session 数据全部保存到 Redis 中,用户在提交新的请求后,系统先从Redis 中查找相应的Session 数据,如果存在,则再进行相关操作,否则跳转到登录页面。此时,可以将系统中所有用户的 Session 数据全部保存到 Redis 中,用户在提交新的请求后,系统先从Redis 中查找相应的Session 数据,如果存在,则再进行相关操作,否则跳转到登录页面。当数据量很大时,count 的数量的指定可能会不起作用,Redis 会自动调整每次的遍历数目。_redis命令
URP渲染管线简介-程序员宅基地
文章浏览阅读449次,点赞3次,收藏3次。URP的设计目标是在保持高性能的同时,提供更多的渲染功能和自定义选项。与普通项目相比,会多出Presets文件夹,里面包含着一些设置,包括本色,声音,法线,贴图等设置。全局只有主光源和附加光源,主光源只支持平行光,附加光源数量有限制,主光源和附加光源在一次Pass中可以一起着色。URP:全局只有主光源和附加光源,主光源只支持平行光,附加光源数量有限制,一次Pass可以计算多个光源。可编程渲染管线:渲染策略是可以供程序员定制的,可以定制的有:光照计算和光源,深度测试,摄像机光照烘焙,后期处理策略等等。_urp渲染管线