Python基于OpenCV&YOLO台球击球路线规划系统(源码&部署教程)_桌球延长线源码-程序员宅基地
技术标签: python OpenCV 计算机视觉 目标检测 opencv
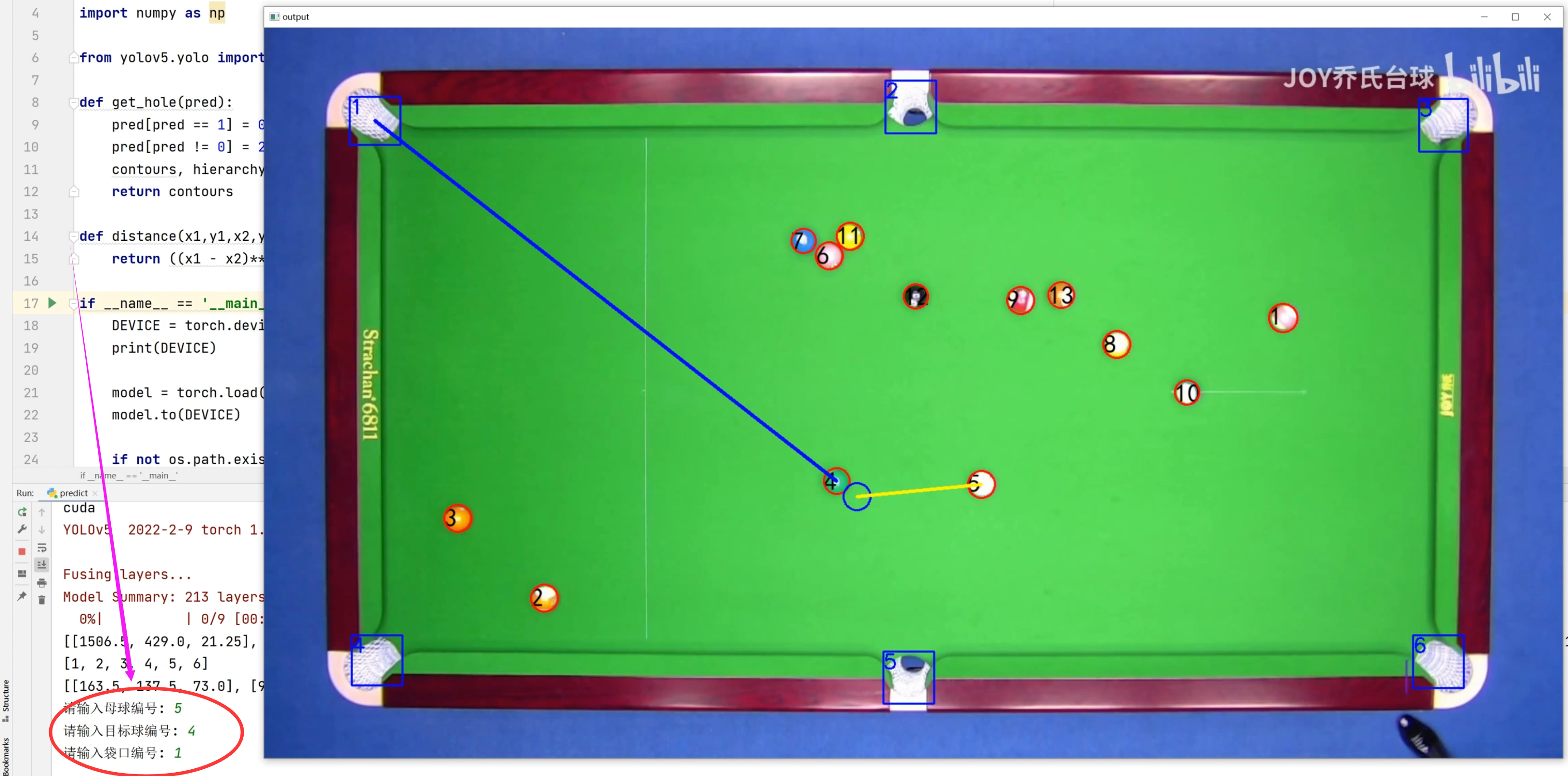
1.项目效果展示



2.视频演示
3.YOLOv7算法简介
YOLOv7 在 5 FPS 到 160 FPS 范围内,速度和精度都超过了所有已知的目标检测器
并在 GPU V100 上,30 FPS 的情况下达到实时目标检测器的最高精度 56.8% AP。YOLOv7 是在 MS COCO 数据集上从头开始训练的,不使用任何其他数据集或预训练权重。
相对于其他类型的工具,YOLOv7-E6 目标检测器(56 FPS V100,55.9% AP)比基于 transformer 的检测器 SWINL Cascade-Mask R-CNN(9.2 FPS A100,53.9% AP)速度上高出 509%,精度高出 2%,比基于卷积的检测器 ConvNeXt-XL Cascade-Mask R-CNN (8.6 FPS A100, 55.2% AP) 速度高出 551%,精度高出 0.7%。
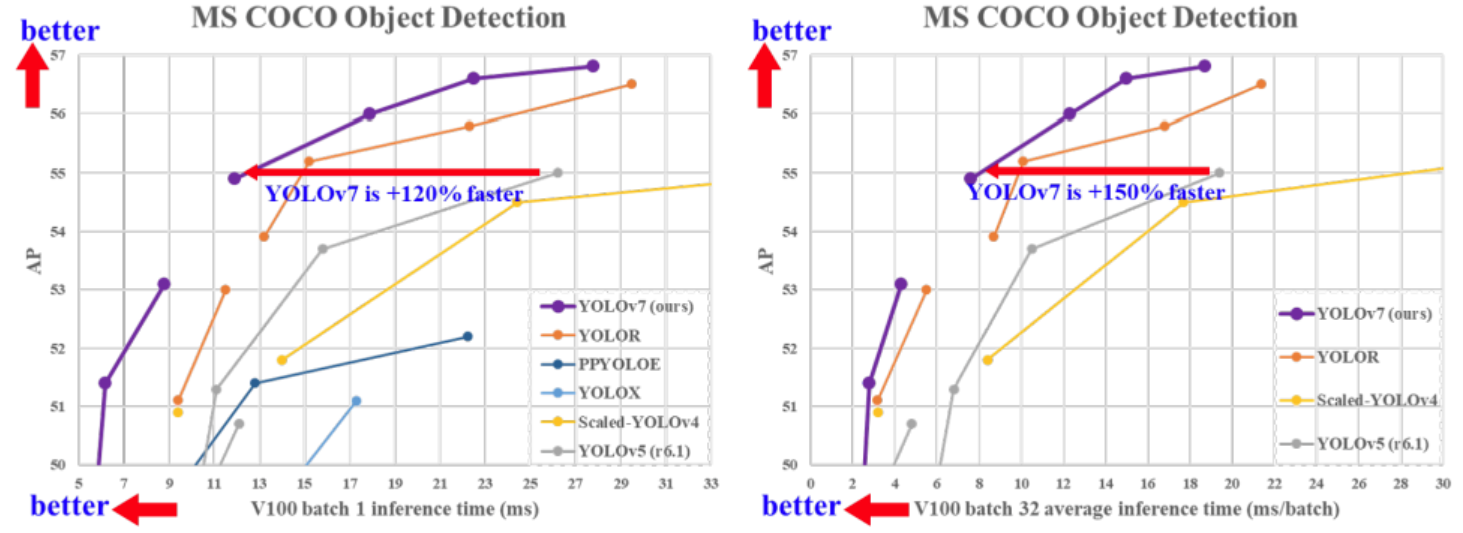
此外, YOLOv7 的在速度和精度上的表现也优于 YOLOR、YOLOX、Scaled-YOLOv4、YOLOv5、DETR 等多种目标检测器。
4.YOLOv7 技术方法
近年来,实时目标检测器仍在针对不同的边缘设备进行开发。例如,MCUNet 和 NanoDet 的开发专注于生产低功耗单芯片并提高边缘 CPU 的推理速度;YOLOX、YOLOR 等方法专注于提高各种 GPU 的推理速度;实时目标检测器的发展集中在高效架构的设计上;在 CPU 上使用的实时目标检测器的设计主要基于 MobileNet、ShuffleNet 或 GhostNet;为 GPU 开发的实时目标检测器则大多使用 ResNet、DarkNet 或 DLA,并使用 CSPNet 策略来优化架构。
YOLOv7 的发展方向与当前主流的实时目标检测器不同,研究团队希望它能够同时支持移动 GPU 和从边缘到云端的 GPU 设备。除了架构优化之外,该研究提出的方法还专注于训练过程的优化,将重点放在了一些优化模块和优化方法上。这可能会增加训练成本以提高目标检测的准确性,但不会增加推理成本。研究者将提出的模块和优化方法称为可训练的「bag-of-freebies」。
对于模型重参数化,该研究使用梯度传播路径的概念分析了适用于不同网络层的模型重参数化策略,并提出了有计划的重参数化模型。此外,研究者发现使用动态标签分配技术时,具有多个输出层的模型在训练时会产生新的问题:「如何为不同分支的输出分配动态目标?」针对这个问题,研究者提出了一种新的标签分配方法,称为从粗粒度到细粒度(coarse-to-fine)的引导式标签分配。
该研究的主要贡献包括:
(1) 设计了几种可训练的 bag-of-freebies 方法,使得实时目标检测可以在不增加推理成本的情况下大大提高检测精度;
(2) 对于目标检测方法的演进,研究者发现了两个新问题:一是重参数化的模块如何替换原始模块,二是动态标签分配策略如何处理分配给不同输出层的问题,并提出了解决这两个问题的方法;
(3) 提出了实时目标检测器的「扩充(extend)」和「复合扩展(compound scale)」方法,以有效地利用参数和计算;
(4) 该研究提出的方法可以有效减少 SOTA 实时目标检测器约 40% 的参数和 50% 的计算量,并具有更快的推理速度和更高的检测精度。
在大多数关于设计高效架构的文献中,人们主要考虑的因素包括参数的数量、计算量和计算密度。下图 2(b)中 CSPVoVNet 的设计是 VoVNet 的变体。CSPVoVNet 的架构分析了梯度路径,以使不同层的权重能够学习更多不同的特征,使推理更快、更准确。图 2 中的 ELAN 则考虑了「如何设计一个高效网络」的问题。
YOLOv7 研究团队提出了基于 ELAN 的扩展 E-ELAN,其主要架构如图所示。
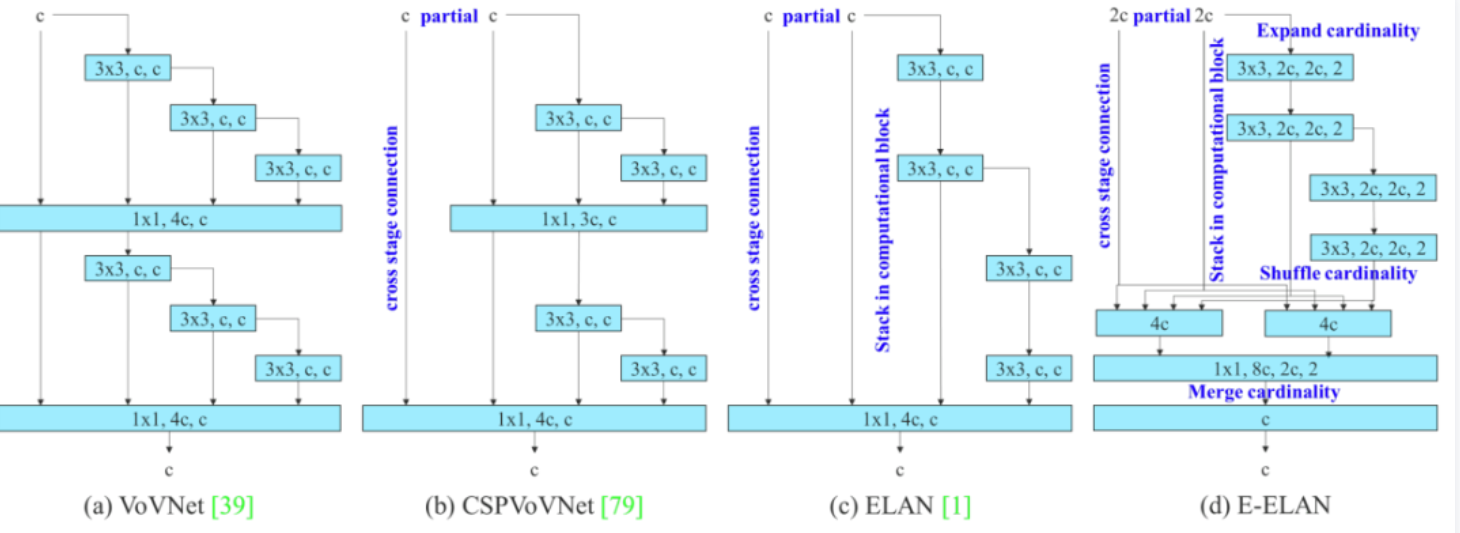
新的 E-ELAN 完全没有改变原有架构的梯度传输路径,其中使用组卷积来增加添加特征的基数(cardinality),并以 shuffle 和 merge cardinality 的方式组合不同组的特征。这种操作方式可以增强不同特征图学得的特征,改进参数的使用和计算效率。
无论梯度路径长度和大规模 ELAN 中计算块的堆叠数量如何,它都达到了稳定状态。如果无限堆叠更多的计算块,可能会破坏这种稳定状态,参数利用率会降低。新提出的 E-ELAN 使用 expand、shuffle、merge cardinality 在不破坏原有梯度路径的情况下让网络的学习能力不断增强。
在架构方面,E-ELAN 只改变了计算块的架构,而过渡层(transition layer)的架构完全没有改变。YOLOv7 的策略是使用组卷积来扩展计算块的通道和基数。研究者将对计算层的所有计算块应用相同的组参数和通道乘数。然后,每个计算块计算出的特征图会根据设置的组参数 g 被打乱成 g 个组,再将它们连接在一起。此时,每组特征图的通道数将与原始架构中的通道数相同。最后,该方法添加 g 组特征图来执行 merge cardinality。除了保持原有的 ELAN 设计架构,E-ELAN 还可以引导不同组的计算块学习更多样化的特征。
因此,对基于串联的模型,我们不能单独分析不同的扩展因子,而必须一起考虑。该研究提出图 (c),即在对基于级联的模型进行扩展时,只需要对计算块中的深度进行扩展,其余传输层进行相应的宽度扩展。这种复合扩展方法可以保持模型在初始设计时的特性和最佳结构。
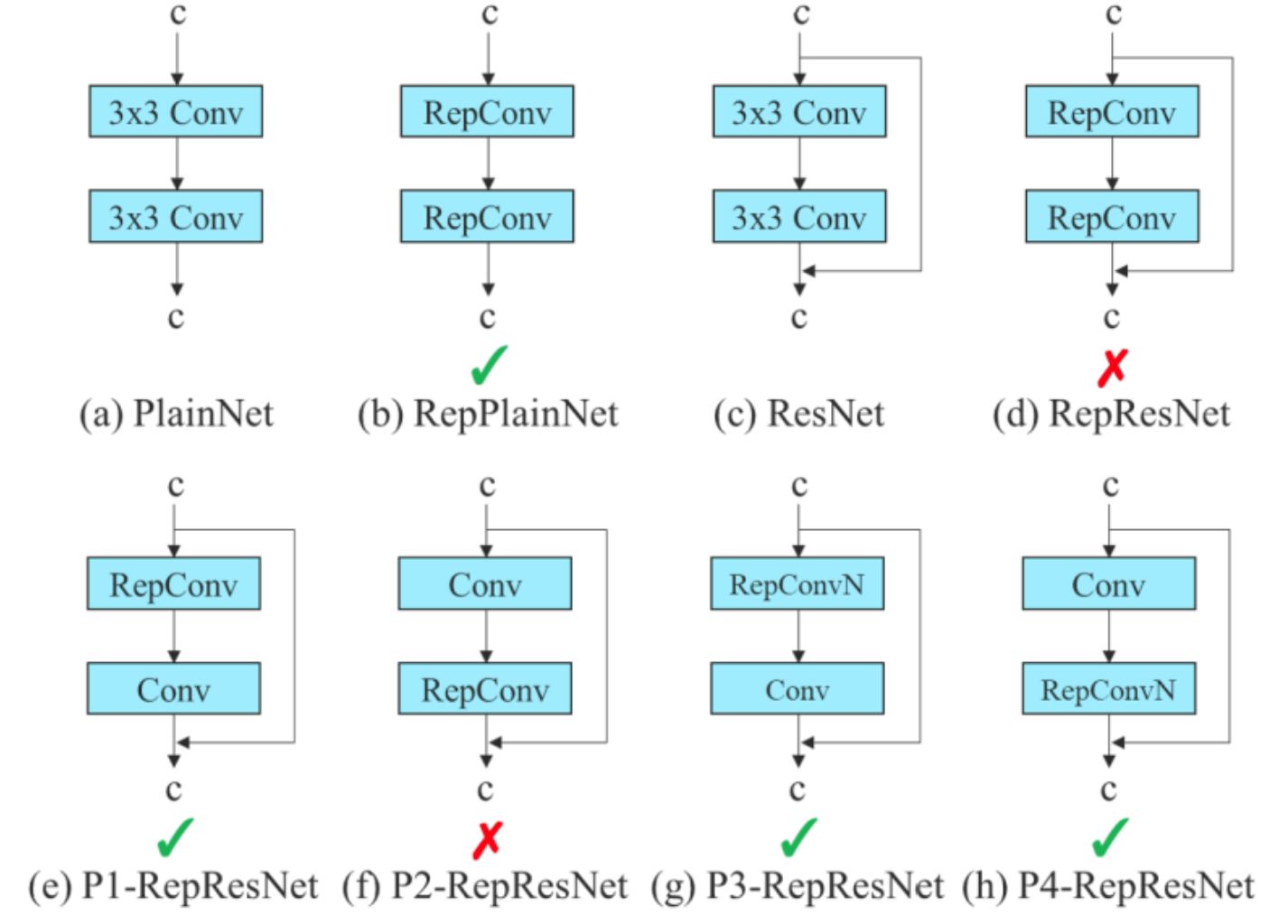
此外,该研究使用梯度流传播路径来分析如何重参数化卷积,以与不同的网络相结合。下图展示了该研究设计的用于 PlainNet 和 ResNet 的「计划重参数化卷积」。
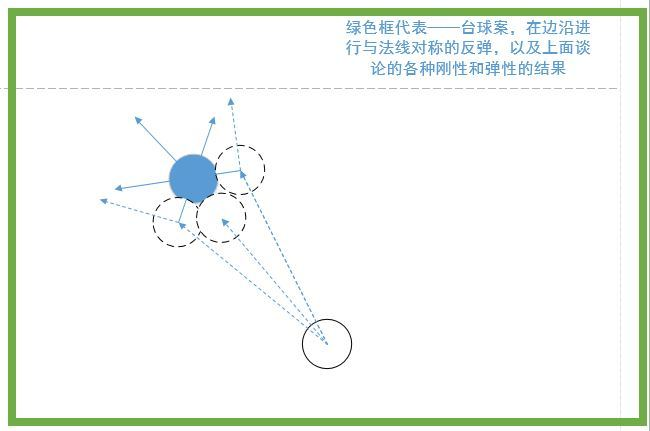
5.台球击球路线原理
(1)球路的选定
台球的瞄准方法,是根据力的直线传递原理,通过主球撞击目标球,目标球被撞击后,便沿着直线进入球袋。因为球台上有6个球袋,分别固定在四角和边岸中部,而球是可以在球台上到处滚动的,要想把其中某一个球打进球袋,必须在球群中观察选择,哪个球的球路、角度最合适、容易进袋,在袋口附近有一个目标球,要想使这个球进袋,便要先看看球路是否合适,然后由球袋口中心,通过目标球中心,划一条直线,这条直线便是目标球进袋要走的路线。
(2)目标球上的击点
因为目标球没有外力推动本身是不能滚动的,必须通过主球的撞击才行。根据力的直线传递原理,要把某个目标球打进球袋,不能随便乱撞目标球上的任何点位,必须根据目标球的进袋线路,确定主球应该撞击目标球上的击点位置,才能完成打球入袋。
由目标球所对着的球袋中心,经过目标球中心延长线,这条线和目标球外圆相交在M点,这个点便是目标球上的击点。
(3)瞄准点
目标球上的击点确定之后,接着要确定瞄准点的位置。从目标球上的击点M,再沿这条直线向后,量出一段与球的半径相等的长度,最远点T就是瞄准点。以T点为圆心划一个圆形虚线,这个圆球形表示主球要撞击目标球必须来到的位置,主球与目标球的外圆才能在M点相交,与目标球相撞击,主球上的力量便通过M点传递给目标球,使它沿目标球球路入袋。
6.整合代码实现
import torch, cv2, os, tqdm
import numpy as np
import numpy as np
from yolov5.yolo import YOLOV5_Detect, opt
def get_hole(pred):
pred[pred == 1] = 0
pred[pred != 0] = 255
contours, hierarchy = cv2.findContours(pred[:, :, 0], cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
return contours
def distance(x1,y1,x2,y2):
return ((x1 - x2)**2+(y1 - y2)**2)**0.5
if __name__ == '__main__':
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(DEVICE)
model = torch.load('model.pkl')
model.to(DEVICE)
if not os.path.exists('output'):
os.mkdir('output')
path = 'detect'
yolo_detect = YOLOV5_Detect(**vars(opt))
for i in tqdm.tqdm(os.listdir(path)):
# 读取图像
ori_img = cv2.imdecode(np.fromfile('{}/{}'.format(path, i), np.uint8), cv2.IMREAD_COLOR)
yolov5_res,balllist,ballvalue = yolo_detect.detect(ori_img)
# 记录原图尺寸
img_shape = ori_img.shape
# Resize到训练大小 640*320
img_ = cv2.resize(ori_img, (640, 320))
# 转换通道 归一化
img = np.transpose(np.expand_dims(img_, axis=0), (0, 3, 1, 2)) / 255.0
# 转换成tensor格式
img = torch.from_numpy(img).to(DEVICE).float()
# 预测
pred = np.argmax(model(img).cpu().detach().numpy()[0], axis=0)
# 1 2 对应着目标类别
pred_mask = []
for j in pred.reshape((-1)):
if j == 0:
pred_mask.append(np.array([0, 0, 0]))
elif j == 1:
pred_mask.append(np.array([0, 0, 255]))
elif j == 2:
pred_mask.append(np.array([255, 0, 0]))
pred_mask = np.array(pred_mask, dtype=np.uint8).reshape((pred.shape[0], pred.shape[1], 3))
pred = np.expand_dims(pred, axis=-1)
pred = np.repeat(pred, axis=-1, repeats=3)
pred = np.array(pred, dtype=np.uint8)
pred = cv2.resize(pred, (img_shape[1], img_shape[0]), interpolation=cv2.INTER_NEAREST)
pred_mask = cv2.resize(pred_mask, (img_shape[1], img_shape[0]), interpolation=cv2.INTER_NEAREST)
contours = get_hole(pred)
pred[pred == 0] = 255
pred[pred != 255] = 0
yolov5_res = yolov5_res & pred
# yolov5_res = cv2.addWeighted(yolov5_res, 0.5, pred_mask, 0.5, 0)
# ori_img = yolov5_res & pred
holes_coordinate = []
radius = 0
number = 0
for cnts in contours:
x, y, w, h = cv2.boundingRect(cnts)
holes_coordinate.append([x, y, w, h])
radius = radius + (w + h)/2
number = number + 1
holllist = []
hollvalue = []
holes_coordinate = sorted(holes_coordinate, key=lambda x:x[2] * x[3], reverse=True)[:6]
holes_coordinate = sorted(holes_coordinate, key=lambda x:x[1])
for idx, (x, y, w, h) in enumerate(sorted(holes_coordinate[:3], key=lambda x:x[0])):
cv2.rectangle(yolov5_res, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.putText(yolov5_res, '{:.0f}'.format(idx + 1),
(x, y + 25), cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(255, 0, 0), 2)
holllist.append(idx + 1)
hollvalue.append([x + w / 2, y + h / 2, (w + h) / 2])
#print('hole {} x_center:{:.2f} y_center:{:.2f} radius:{:.2f}'.format(idx + 1, x + w / 2, y + h / 2, (w + h) / 2))
for idx, (x, y, w, h) in enumerate(sorted(holes_coordinate[3:], key=lambda x:x[0])):
cv2.rectangle(yolov5_res, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.putText(yolov5_res, '{:.0f}'.format(idx + 4),
(x, y + 25), cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(255, 0, 0), 2)
holllist.append(idx + 4)
hollvalue.append([x + w / 2, y + h / 2, (w + h) / 2])
#print('hole {} x_center:{:.2f} y_center:{:.2f} radius:{:.2f}'.format(idx + 4, x + w / 2, y + h / 2, (w + h) / 2))
for m in range(len(balllist)):
cv2.circle(yolov5_res, (int(ballvalue[m][0]),int(ballvalue[m][1])), int(ballvalue[m][2]), [0,0,255], 2)
cv2.imshow('input', yolov5_res)
cv2.waitKey(0)
print(balllist)
print(ballvalue)
print(holllist)
print(hollvalue)
a = input("请输入母球编号: ")
b = input("请输入目标球编号: ")
c = input("请输入袋口编号: ")
x1 = int(ballvalue[balllist.index(int(a))][0])
y1 = int(ballvalue[balllist.index(int(a))][1])
r1 = int(ballvalue[balllist.index(int(a))][2])
x2 = int(ballvalue[balllist.index(int(b))][0])
y2 = int(ballvalue[balllist.index(int(b))][1])
r2 = int(ballvalue[balllist.index(int(b))][2])
x3 = int(hollvalue[holllist.index(int(c))][0])
y3 = int(hollvalue[holllist.index(int(c))][1])
r3 = int(hollvalue[holllist.index(int(c))][2])
#画出目标球的可能行进路线:
def drawline(yolov5_res,x1,y1,x2,y2,r):
gen = ((x2-x1)**2+(y2-y1)**2)**0.5
x3 = int(x1 - (y2-y1)*r/gen)
y3 = int(y1 + (x2-x1)*r/gen)
x4 = int(x2 - (y2-y1)*r/gen)
y4 = int(y2 + (x2-x1)*r/gen)
x5 = int(x1 + (y2 - y1) * r / gen)
y5 = int(y1 - (x2 - x1) * r / gen)
x6 = int(x2 + (y2 - y1) * r / gen)
y6 = int(y2 - (x2 - x1) * r / gen)
cv2.line(yolov5_res, (x3, y3), (x4, y4), (255, 255, 255), 3)
cv2.line(yolov5_res, (x5, y5), (x6, y6), (255, 255, 255), 3)
return yolov5_res
cv2.line(yolov5_res,(x2,y2),(x3,y3),(255, 0, 0),3)
yolov5_res = drawline(yolov5_res,x2,y2,x3,y3,r2)
#画出撞击点
xz = int(x3 + (x2 - x3)*((r1+r2) + distance(x2,y2,x3,y3))/(distance(x2,y2,x3,y3)))
yz = int(y3 + (y2 - y3)*((r1+r2) + distance(x2,y2,x3,y3))/(distance(x2,y2,x3,y3)))
cv2.circle(yolov5_res, (xz,yz), int(ballvalue[balllist.index(int(a))][2]), [255, 0, 0], 2)
#画出母球的行进路线
cv2.line(yolov5_res, (xz, yz), (x1, y1), (255, 0, 0), 3)
yolov5_res = drawline(yolov5_res, xz, yz, x1, y1,r1)
cv2.imshow('output',yolov5_res)
cv2.waitKey(0)
#cv2.imwrite('output/{}'.format(i), yolov5_res)
7.项目文件展示
智能推荐
Docker 快速上手学习入门教程_docker菜鸟教程-程序员宅基地
文章浏览阅读2.5w次,点赞6次,收藏50次。官方解释是,docker 容器是机器上的沙盒进程,它与主机上的所有其他进程隔离。所以容器只是操作系统中被隔离开来的一个进程,所谓的容器化,其实也只是对操作系统进行欺骗的一种语法糖。_docker菜鸟教程
电脑技巧:Windows系统原版纯净软件必备的两个网站_msdn我告诉你-程序员宅基地
文章浏览阅读5.7k次,点赞3次,收藏14次。该如何避免的,今天小编给大家推荐两个下载Windows系统官方软件的资源网站,可以杜绝软件捆绑等行为。该站提供了丰富的Windows官方技术资源,比较重要的有MSDN技术资源文档库、官方工具和资源、应用程序、开发人员工具(Visual Studio 、SQLServer等等)、系统镜像、设计人员工具等。总的来说,这两个都是非常优秀的Windows系统镜像资源站,提供了丰富的Windows系统镜像资源,并且保证了资源的纯净和安全性,有需要的朋友可以去了解一下。这个非常实用的资源网站的创建者是国内的一个网友。_msdn我告诉你
vue2封装对话框el-dialog组件_<el-dialog 封装成组件 vue2-程序员宅基地
文章浏览阅读1.2k次。vue2封装对话框el-dialog组件_
MFC 文本框换行_c++ mfc同一框内输入二行怎么换行-程序员宅基地
文章浏览阅读4.7k次,点赞5次,收藏6次。MFC 文本框换行 标签: it mfc 文本框1.将Multiline属性设置为True2.换行是使用"\r\n" (宽字符串为L"\r\n")3.如果需要编辑并且按Enter键换行,还要将 Want Return 设置为 True4.如果需要垂直滚动条的话将Vertical Scroll属性设置为True,需要水平滚动条的话将Horizontal Scroll属性设_c++ mfc同一框内输入二行怎么换行
redis-desktop-manager无法连接redis-server的解决方法_redis-server doesn't support auth command or ismis-程序员宅基地
文章浏览阅读832次。检查Linux是否是否开启所需端口,默认为6379,若未打开,将其开启:以root用户执行iptables -I INPUT -p tcp --dport 6379 -j ACCEPT如果还是未能解决,修改redis.conf,修改主机地址:bind 192.168.85.**;然后使用该配置文件,重新启动Redis服务./redis-server redis.conf..._redis-server doesn't support auth command or ismisconfigured. try
实验四 数据选择器及其应用-程序员宅基地
文章浏览阅读4.9k次。济大数电实验报告_数据选择器及其应用
随便推点
灰色预测模型matlab_MATLAB实战|基于灰色预测河南省社会消费品零售总额预测-程序员宅基地
文章浏览阅读236次。1研究内容消费在生产中占据十分重要的地位,是生产的最终目的和动力,是保持省内经济稳定快速发展的核心要素。预测河南省社会消费品零售总额,是进行宏观经济调控和消费体制改变创新的基础,是河南省内人民对美好的全面和谐社会的追求的要求,保持河南省经济稳定和可持续发展具有重要意义。本文建立灰色预测模型,利用MATLAB软件,预测出2019年~2023年河南省社会消费品零售总额预测值分别为21881...._灰色预测模型用什么软件
log4qt-程序员宅基地
文章浏览阅读1.2k次。12.4-在Qt中使用Log4Qt输出Log文件,看这一篇就足够了一、为啥要使用第三方Log库,而不用平台自带的Log库二、Log4j系列库的功能介绍与基本概念三、Log4Qt库的基本介绍四、将Log4qt组装成为一个单独模块五、使用配置文件的方式配置Log4Qt六、使用代码的方式配置Log4Qt七、在Qt工程中引入Log4Qt库模块的方法八、获取示例中的源代码一、为啥要使用第三方Log库,而不用平台自带的Log库首先要说明的是,在平时开发和调试中开发平台自带的“打印输出”已经足够了。但_log4qt
100种思维模型之全局观思维模型-67_计算机中对于全局观的-程序员宅基地
文章浏览阅读786次。全局观思维模型,一个教我们由点到线,由线到面,再由面到体,不断的放大格局去思考问题的思维模型。_计算机中对于全局观的
线程间控制之CountDownLatch和CyclicBarrier使用介绍_countdownluach于cyclicbarrier的用法-程序员宅基地
文章浏览阅读330次。一、CountDownLatch介绍CountDownLatch采用减法计算;是一个同步辅助工具类和CyclicBarrier类功能类似,允许一个或多个线程等待,直到在其他线程中执行的一组操作完成。二、CountDownLatch俩种应用场景: 场景一:所有线程在等待开始信号(startSignal.await()),主流程发出开始信号通知,既执行startSignal.countDown()方法后;所有线程才开始执行;每个线程执行完发出做完信号,既执行do..._countdownluach于cyclicbarrier的用法
自动化监控系统Prometheus&Grafana_-自动化监控系统prometheus&grafana实战-程序员宅基地
文章浏览阅读508次。Prometheus 算是一个全能型选手,原生支持容器监控,当然监控传统应用也不是吃干饭的,所以就是容器和非容器他都支持,所有的监控系统都具备这个流程,_-自动化监控系统prometheus&grafana实战
React 组件封装之 Search 搜索_react search-程序员宅基地
文章浏览阅读4.7k次。输入关键字,可以通过键盘的搜索按钮完成搜索功能。_react search