黑群晖DSM7.0.1物理机安装教程_黑群晖7.0安装教程-程序员宅基地
为了更好的浏览体验,欢迎光顾勤奋的凯尔森同学个人博客http://www.huerpu.cc:7000
本教程所需文件点击下载
一、硬件信息说明
| 项目 | 配置 | RMB |
|---|---|---|
| CPU | i7 8700T | 1245元 |
| 主板 | 技嘉B365 M AORUS ELITE | 509元 |
| 内存条 | 美商海盗船 DDR4 3000Hz 8G * 4 | 1000元 |
| 机箱 | 万由NSC-810A U-NAS | 1150元 |
| 电源 | 海韵350W | 450元 |
| 散热 | 英特尔CPU自带散热 | 没花钱 |
| SSD | 三星980 500G * 2 | 1000元 |
| NAS硬盘 | 希捷酷狼 4T * 8 | 6250元 |
| 11604元 |
二、制作U盘引导
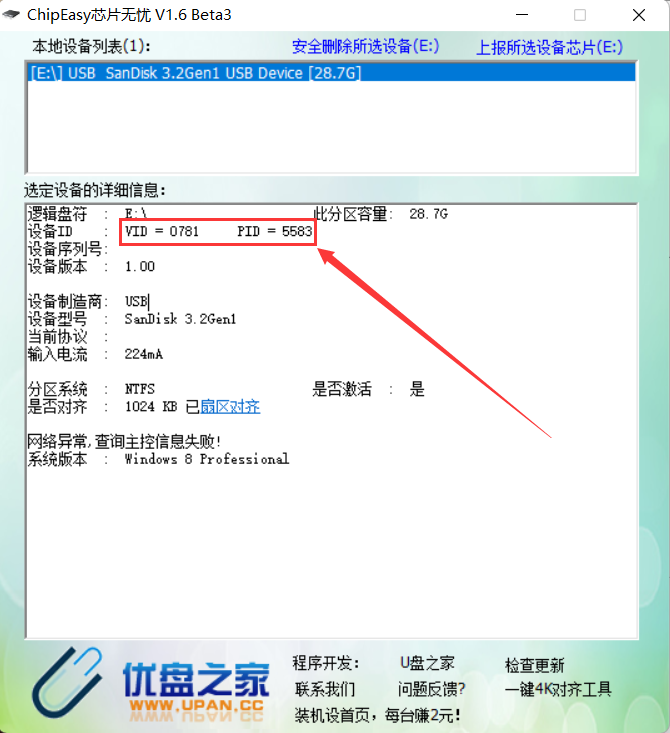
使用芯片无忧工具,查看U盘的PID和VID。
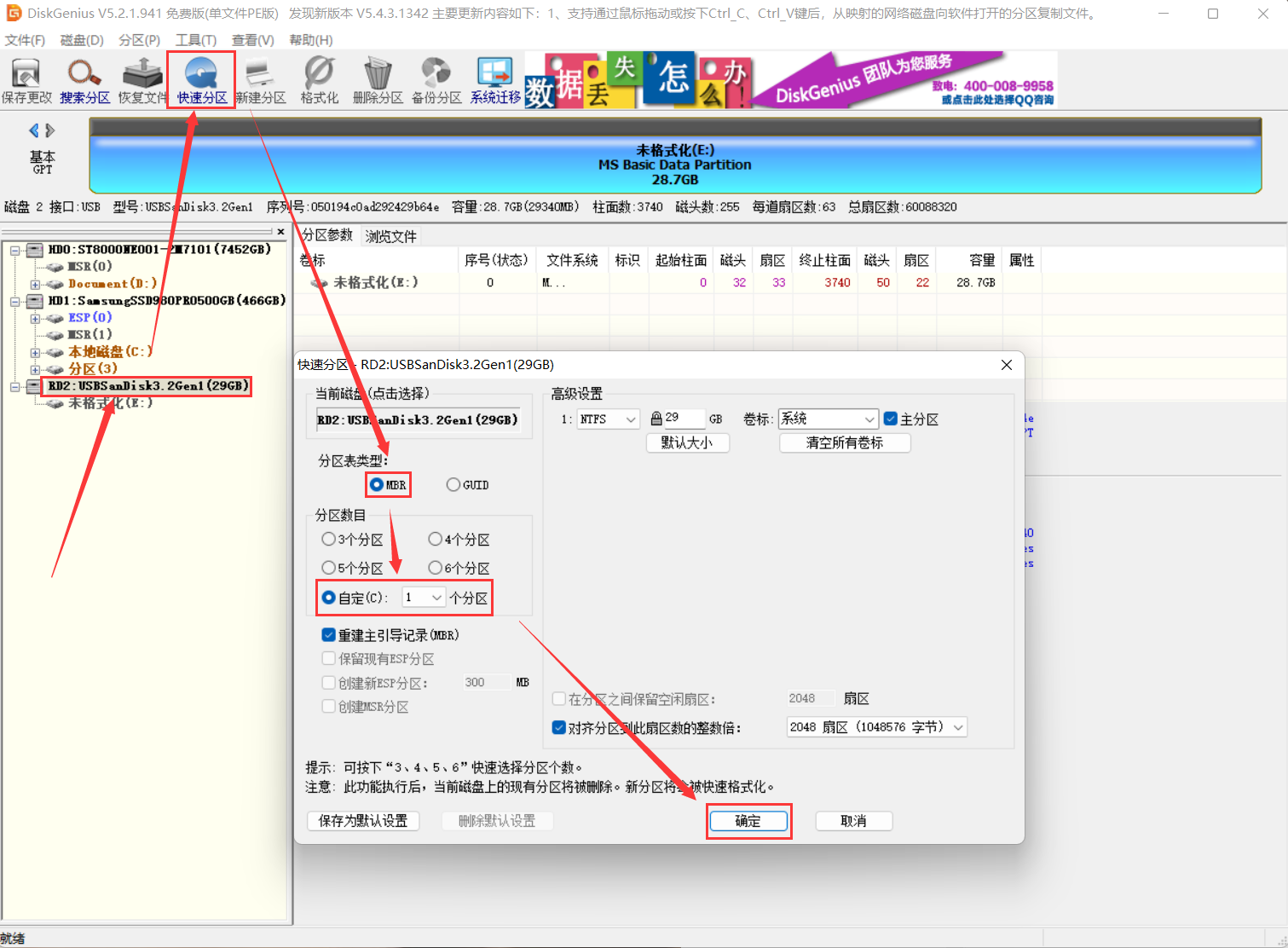
使用DiskGenius,格式化U盘。
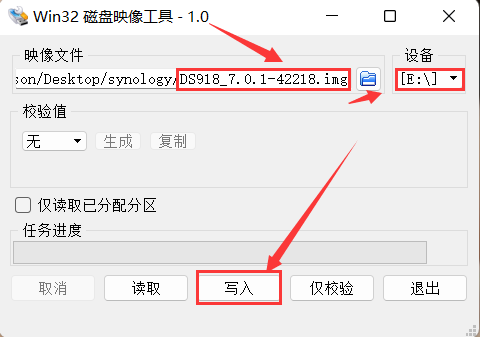
使用镜像写入工具,把引导写入U盘。
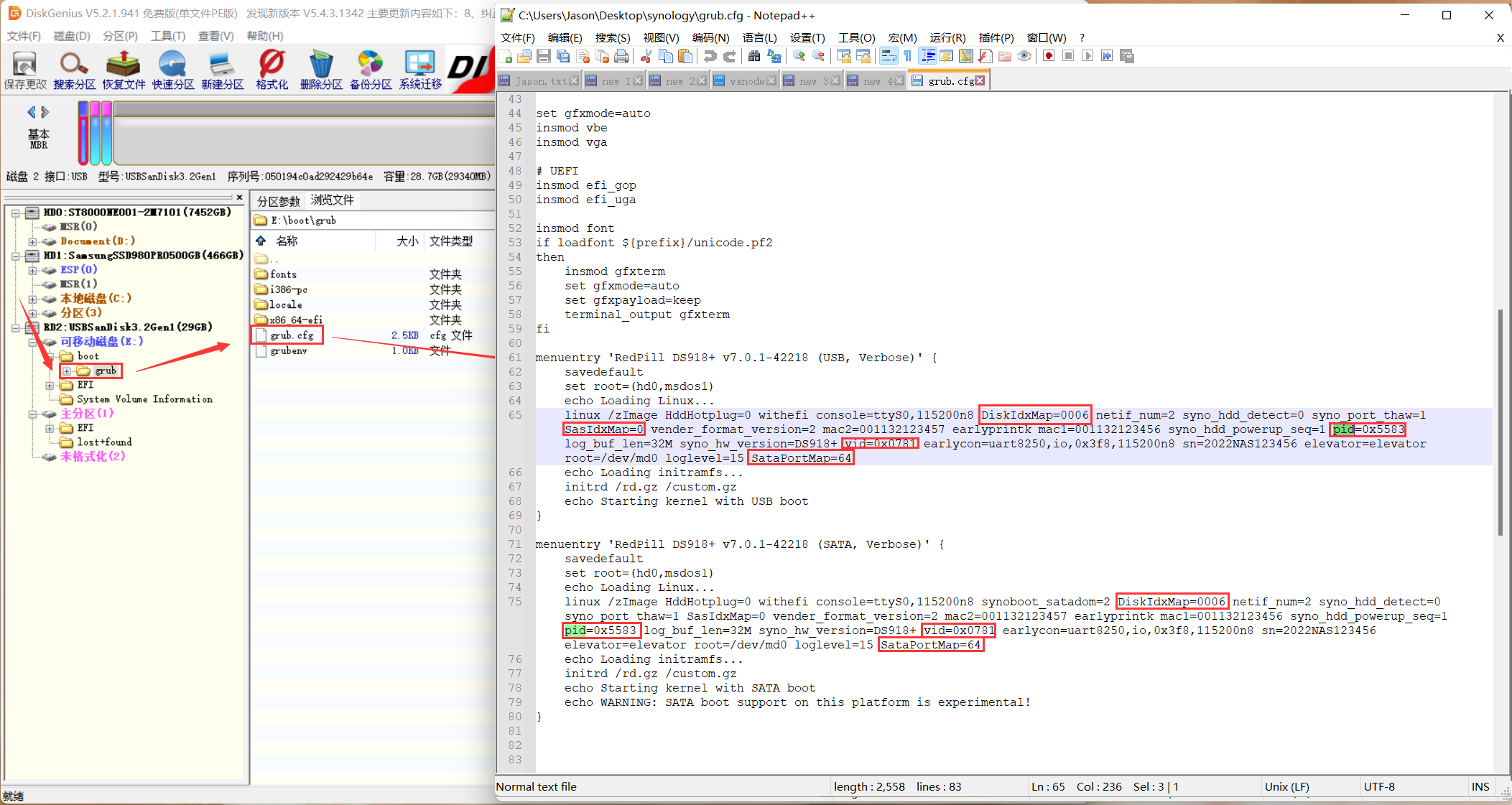
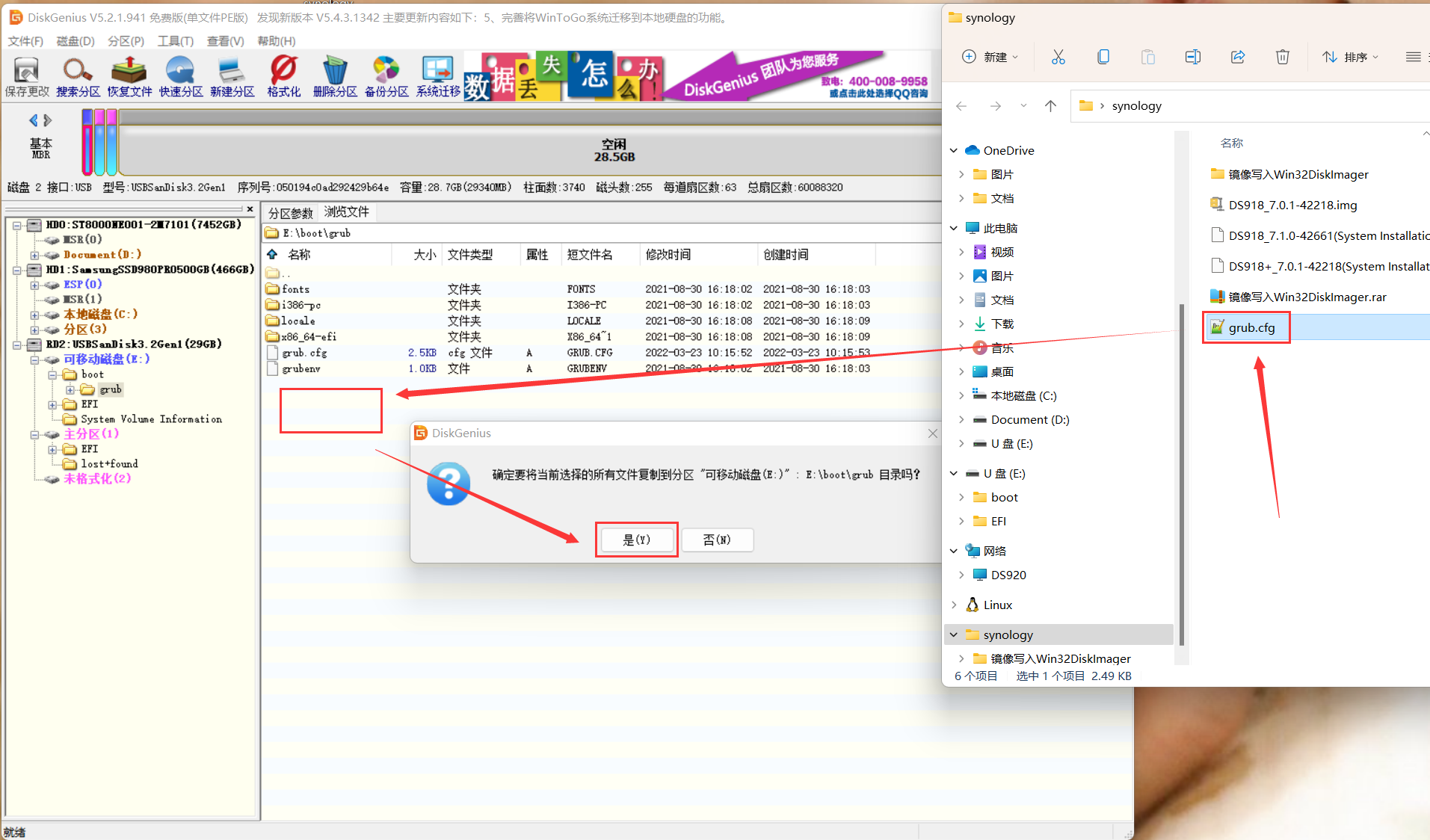
修改grub.cfg文件,可以使用DiskGenius工具把文件复制到桌面,通过notepad++修改好之后,拖进DiskGenius这个界面中。或者在电脑中,查看U盘,打开U盘中的grub.cfg文件直接修改。
具体修改内容如下:
-
PID修改为U盘的PID
-
VID修改为U盘的VID
-
默认只有mac1=a8412083CB52 mac2=0a11323D47F7 ,增加:mac3=a15823C08000 mac4=a23C04158B52 mac5=82a002524158 mac6=38233052415a
-
SataPortMap=64
-
DiskIdxMap=0006
SataPortMap=64,因为我的主板上有6个sata口,然后PCIE扩展了4个SATA口,所以这里写了64,分别对应主板的SATA数目和PCIE的SATA数目。
DiskIdxMap=0006,因为主板的6个SATA口分别为00、01、02、03、04、05,所以PCIE的SATA从06开始。也就是说,前面两个00代表主板上的SATA控制从00开始计数,PCIE的SATA从06开始计数。
#
# ### !!! WARNING - READ ME !!! ###
#
# DO NOT edit this file. This file has been generated automatically by the loader generator.
# If you were asked to use a pre-made image and asked by someone to edit this file DO NOT do it. The only
# supported method of obtaining the loader image is generating it using the loader generator provided.
#
terminal_output console
if serial --unit=0 --speed=115200; then
terminal_input --append serial_com0
terminal_output --append serial_com0
fi
set default="0"
set timeout="0"
set timeout_style="menu"
if [ -s $prefix/grubenv ]; then
load_env --file $prefix/grubenv --skip-sig
set has_env="1"
if [ -n "${saved_entry}" ]; then
set default="${saved_entry}"
fi
else
set has_env="0"
echo "WARN: failed to load env. Default choice will NOT be saved!"
fi
function savedefault {
saved_entry="${chosen}"
save_env --file $prefix/grubenv saved_entry
}
insmod usb_keyboard
insmod part_msdos
insmod ext2
insmod fat
insmod linux
insmod gzio
set gfxmode=auto
insmod vbe
insmod vga
# UEFI
insmod efi_gop
insmod efi_uga
insmod font
if loadfont ${prefix}/unicode.pf2
then
insmod gfxterm
set gfxmode=auto
set gfxpayload=keep
terminal_output gfxterm
fi
menuentry 'RedPill DS918+ v7.1.0-42661 (USB, Verbose)' {
savedefault
set root=(hd0,msdos1)
echo Loading Linux...
linux /zImage HddHotplug=0 withefi console=ttyS0,115200n8 DiskIdxMap=0006 netif_num=2 syno_hdd_detect=0 syno_port_thaw=1 SasIdxMap=0 vender_format_version=2 earlyprintk syno_hdd_powerup_seq=1 pid=0x5583 log_buf_len=32M syno_hw_version=DS918+ vid=0x0781 earlycon=uart8250,io,0x3f8,115200n8 sn=2022NAS123456 elevator=elevator root=/dev/md0 loglevel=15 SataPortMap=64 mac1=a8412083CB52 mac2=0a11323D47F7 mac3=a15823C08000 mac4=a23C04158B52 mac5=82a002524158 mac6=38233052415a
echo Loading initramfs...
initrd /rd.gz /custom.gz
echo Starting kernel with USB boot
}
menuentry 'RedPill DS918+ v7.1.0-42661 (SATA, Verbose)' {
savedefault
set root=(hd0,msdos1)
echo Loading Linux...
linux /zImage HddHotplug=0 withefi console=ttyS0,115200n8 synoboot_satadom=2 DiskIdxMap=0006 netif_num=2 syno_hdd_detect=0 syno_port_thaw=1 SasIdxMap=0 vender_format_version=2 earlyprintk syno_hdd_powerup_seq=1 pid=0x5583 log_buf_len=32M syno_hw_version=DS918+ vid=0x0781 earlycon=uart8250,io,0x3f8,115200n8 sn=2022NAS123456 elevator=elevator root=/dev/md0 loglevel=15 SataPortMap=64 mac1=58412083CB52 mac2=0011323D47F7 mac3=415823C08000 mac4=123C04158B52 mac5=823002524158 mac6=382330524158
echo Loading initramfs...
initrd /rd.gz /custom.gz
echo Starting kernel with SATA boot
echo WARNING: SATA boot support on this platform is experimental!
}
三、群晖系统安装
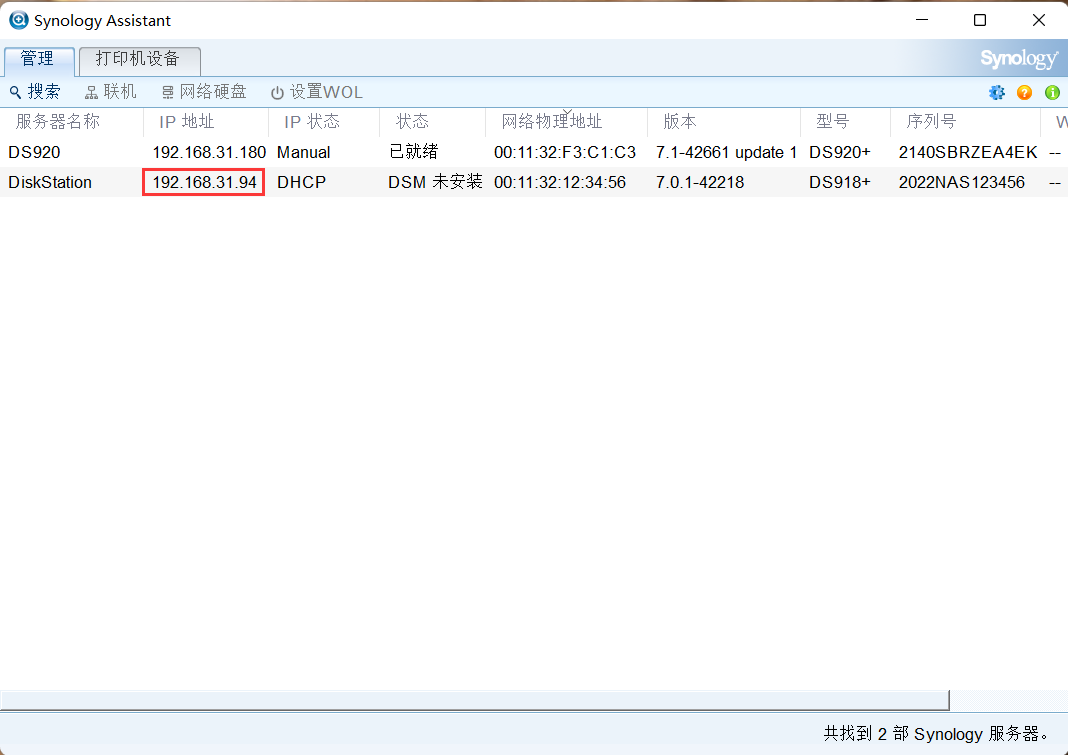
在BIOS中设置U盘启动,然后就可以通过群晖助手进行搜索到了。
在浏览器输入群晖ip地址+5000端口号,进行访问并安装。
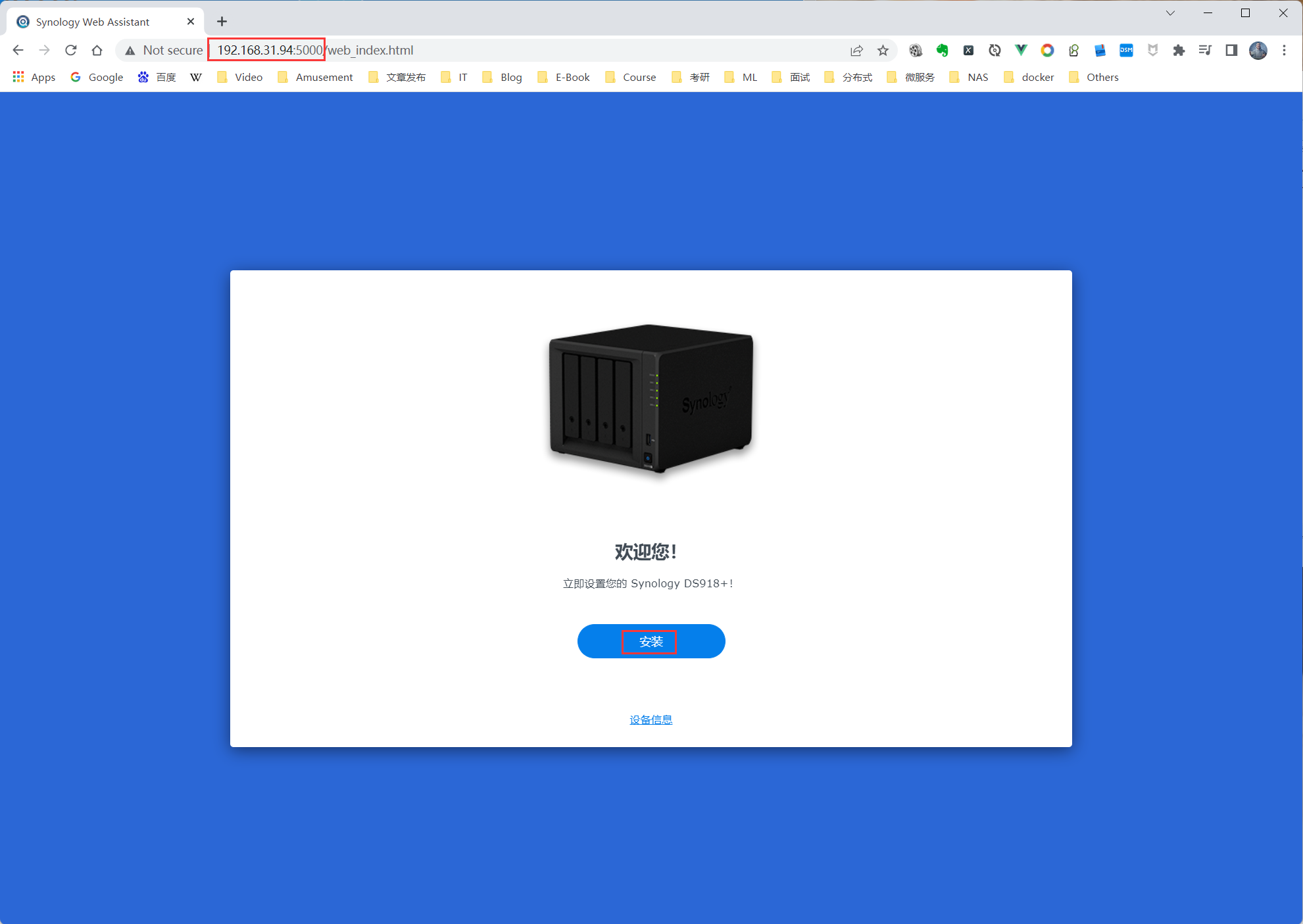
这里选择7.1.0或者7.0.1,具体看你的引导是哪个版本。

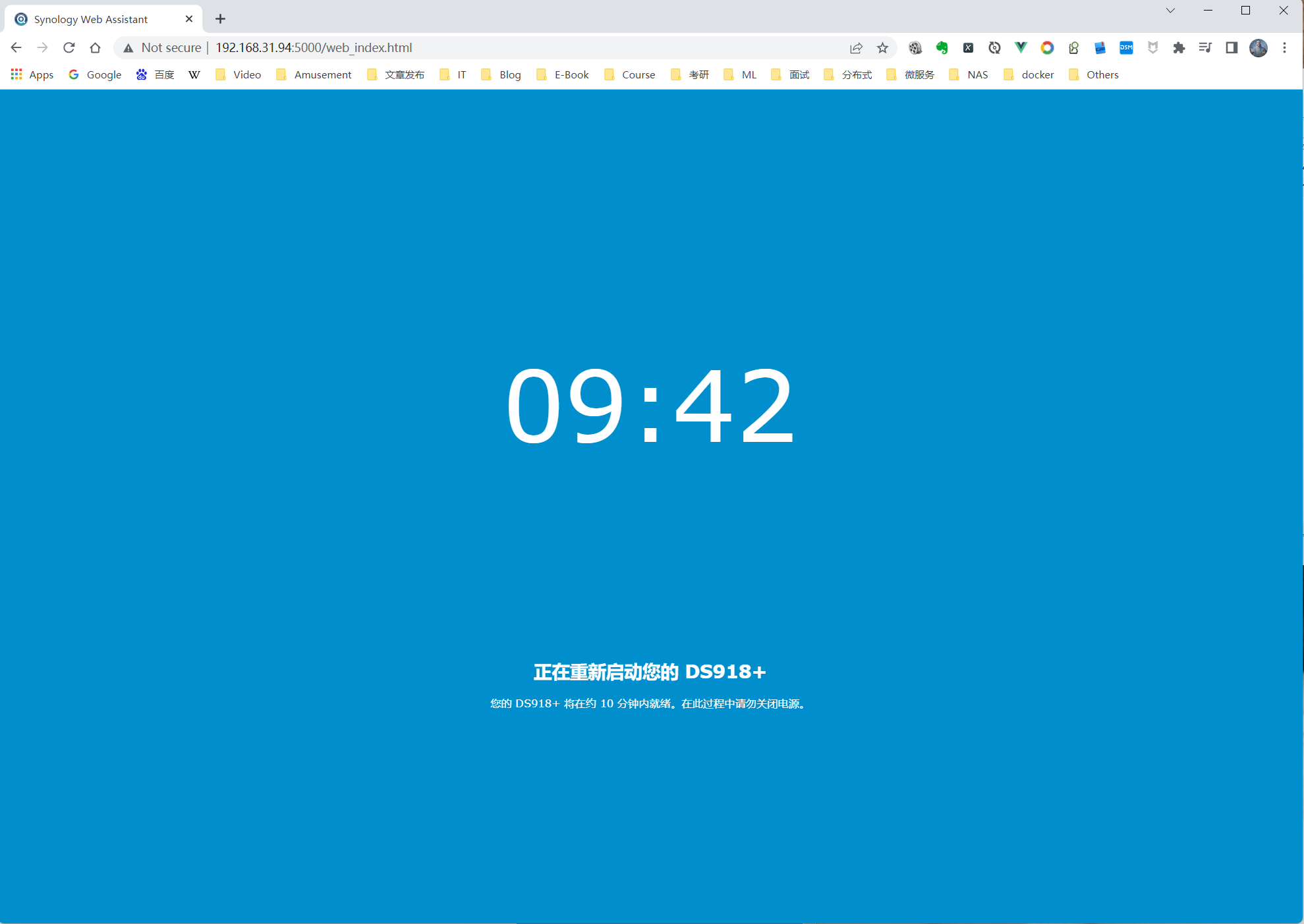
等待安装,这个过程大概十分钟。
安装完成啦。

设置设备名称,以及用户名和密码。

选择手动更新,因为黑群晖更新系统极不稳定,容易造成群晖崩溃。

这里选择跳过。


这里就进入到群晖的DSM界面了。
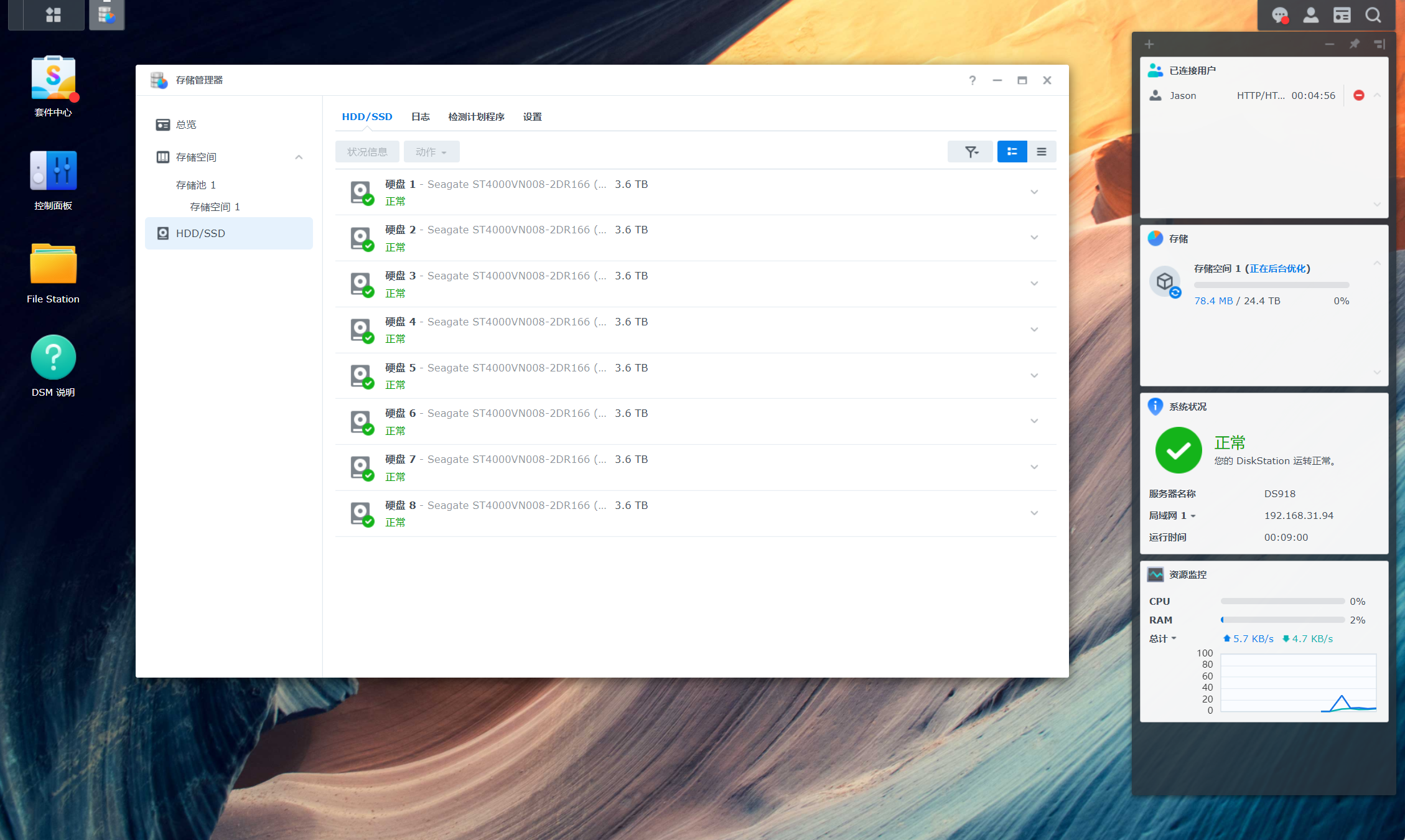
这里创建了8块盘的存储池。
四、添加2.5G网卡驱动
1、将驱动添加入引导
2、通过SSH将驱动添加到群晖系统文件中
3、安装bb-qq大神驱动套件。下载地址
第三种方式最简单,我这里安装的是DS918所以是apollolak架构,所以下载r8152-apollolake-2.15.0-7.spk。
在套件中心,选择右上角的手动安装,然后选择刚刚下载的r8152-apollolake-2.15.0-7.spk文件。这时候会提示无法安装,然后使用ssh工具远程连接群晖,输入以下命令:
sudo install -m 4755 -o root -D /var/packages/r8152/target/r8152/spk_su /opt/sbin/spk_su
此时重新点击手动安装就可以啦。
但这时候默认只有两个网口,我使用的PCIE拓展了4个2.5G的网口,所以我想把四个网口都添加上去。
修改一下最大的lan网卡配置,输入
vi /etc.defaults/synoinfo.conf
把maxlanport="2"修改为maxlanport="6"
然后定位到
eth0_mtu="1500"
eth0_wol_options="d"
eth1_mtu="1500"
eth1_wol_options="d"
增加
eth2_mtu="1500"
eth2_wol_options="d"
eth3_mtu="1500"
eth3_wol_options="d"
eth4_mtu="1500"
eth4_wol_options="d"
eth5_mtu="1500"
eth5_wol_options="d"
输入命令reboot重启。
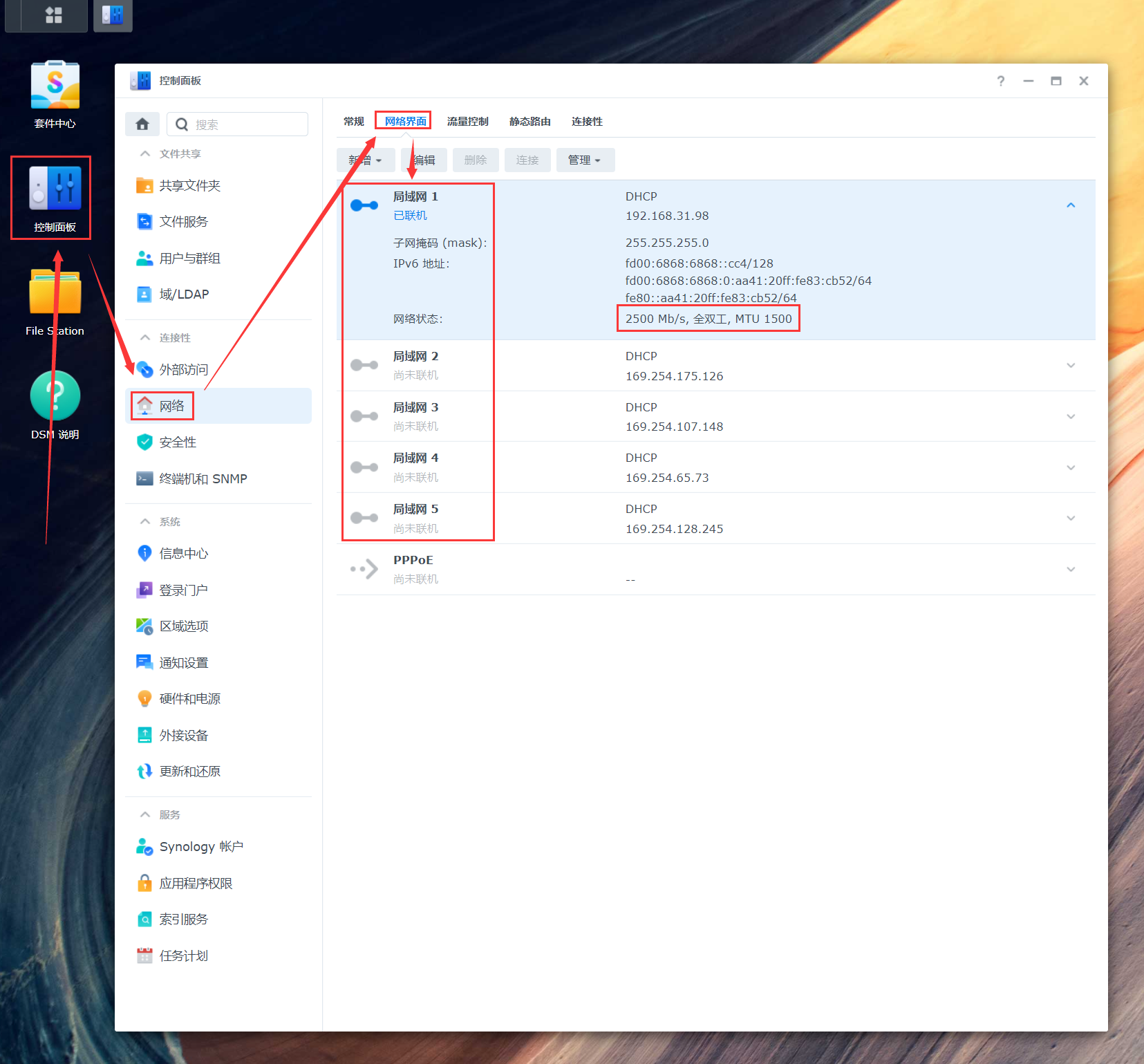
打开群晖,就可以看到我们的2.5G网口可以用了。加上主板上的一个千兆网口,一共五个。
五、添加NVME固态硬盘
#查看nvme硬盘
ls /dev/nvme*
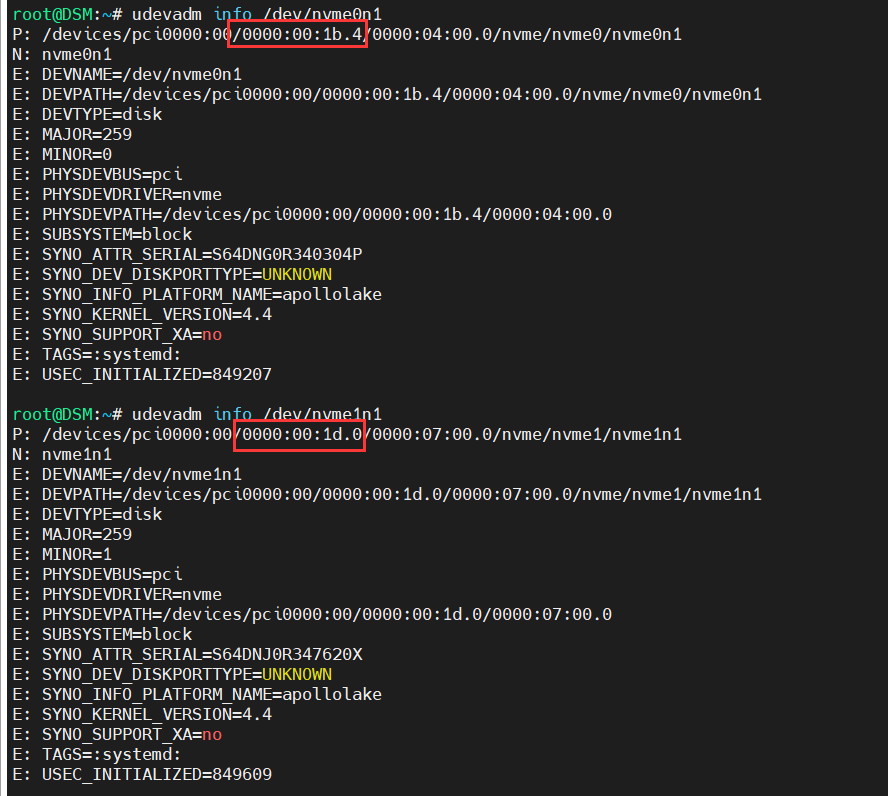
#查看第一块硬盘信息
udevadm info /dev/nvme0
#查看第二块硬盘信息
udevadm info /dev/nvme1
#把libsynonvme.so.1拷贝到document共享文件夹中
cp /lib64/libsynonvme.so.1 /volume1/document/libsynonvme.so.1
#备份libsynonvme.so.1文件
cp /lib64/libsynonvme.so.1 /lib64/libsynonvme.so.1.bak
使用udevadm info /dev/nvme0和udevadm info /dev/nvme1命令查看硬盘信息,分别记住0000:00:1b:4和0000:00:1d.0。
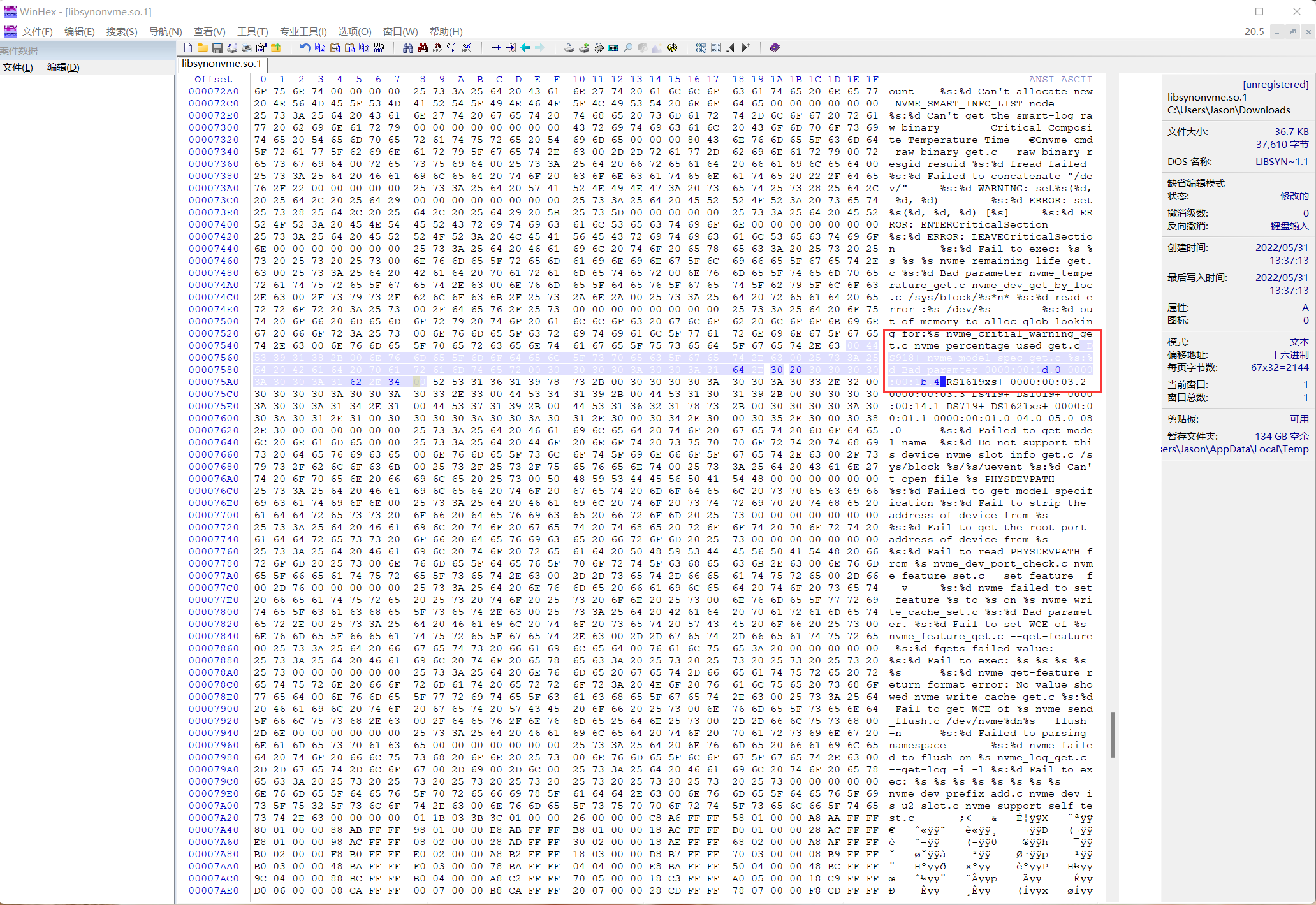
电脑上使用 winhex软件打开刚才下载的 libsynonvme.so.1 文件
搜索nvme_model_spec_get,在右侧找到如下图字段的原数据为0000:00:13.0和0000:00:13.1,把它修改为0000:00:1b:4和0000:00:1d.0,然后保存文件,并上传到群晖的document共享文件夹中。
#把原来的libsynonvme.so.1删除
rm /lib64/libsynonvme.so.1
#把我们刚刚修改过的文件,copy到lib64目录下
cp /volume1/document/libsynonvme.so.1 /lib64/libsynonvme.so.1
#授权
chmod 644 /lib64/libsynonvme.so.1
#重启系统
reboot
重启之后,在存储管理器中,就可以看到两块ssd硬盘了。
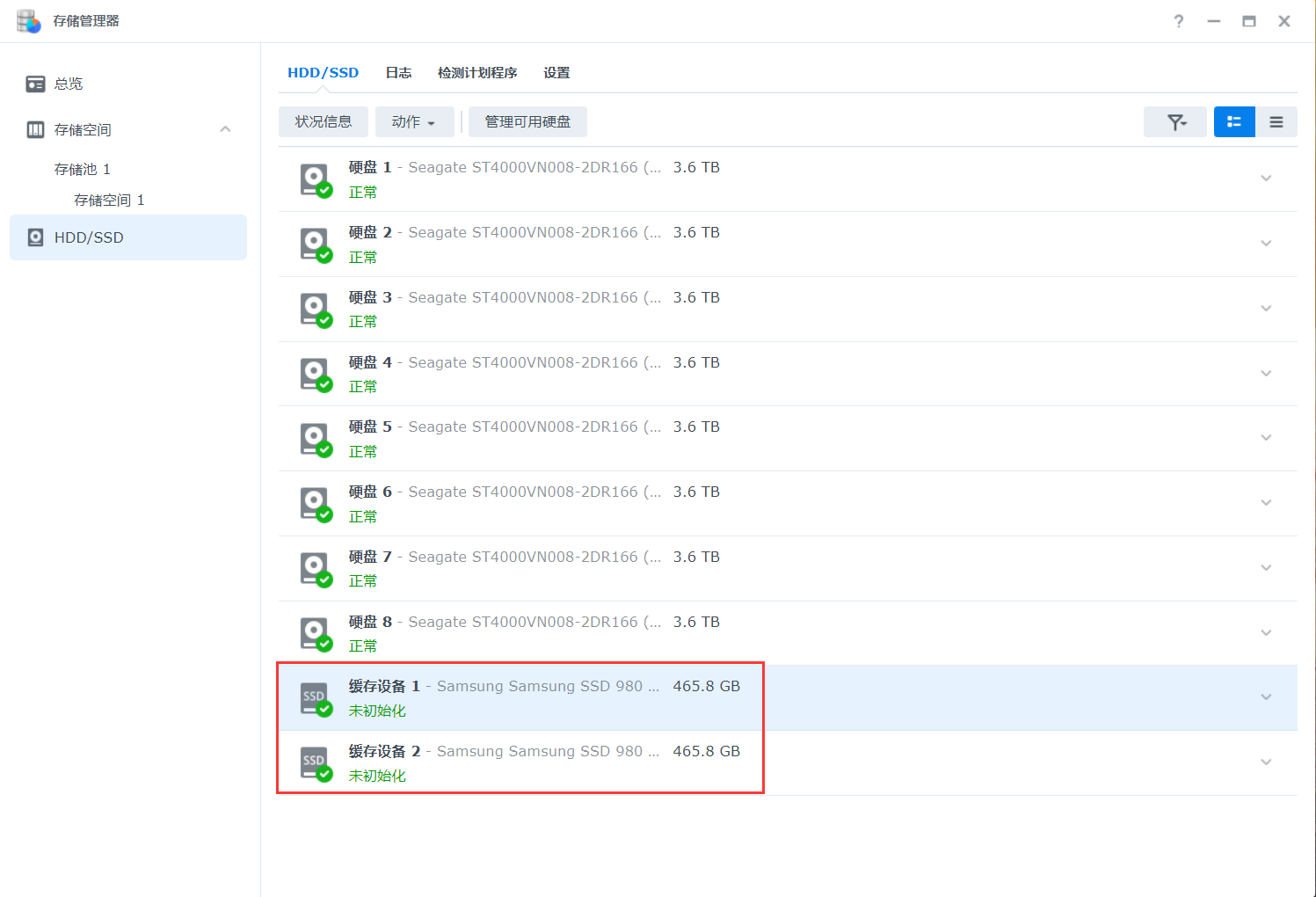
大功告成,enjoy it。
智能推荐
oracle 12c 集群安装后的检查_12c查看crs状态-程序员宅基地
文章浏览阅读1.6k次。安装配置gi、安装数据库软件、dbca建库见下:http://blog.csdn.net/kadwf123/article/details/784299611、检查集群节点及状态:[root@rac2 ~]# olsnodes -srac1 Activerac2 Activerac3 Activerac4 Active[root@rac2 ~]_12c查看crs状态
解决jupyter notebook无法找到虚拟环境的问题_jupyter没有pytorch环境-程序员宅基地
文章浏览阅读1.3w次,点赞45次,收藏99次。我个人用的是anaconda3的一个python集成环境,自带jupyter notebook,但在我打开jupyter notebook界面后,却找不到对应的虚拟环境,原来是jupyter notebook只是通用于下载anaconda时自带的环境,其他环境要想使用必须手动下载一些库:1.首先进入到自己创建的虚拟环境(pytorch是虚拟环境的名字)activate pytorch2.在该环境下下载这个库conda install ipykernelconda install nb__jupyter没有pytorch环境
国内安装scoop的保姆教程_scoop-cn-程序员宅基地
文章浏览阅读5.2k次,点赞19次,收藏28次。选择scoop纯属意外,也是无奈,因为电脑用户被锁了管理员权限,所有exe安装程序都无法安装,只可以用绿色软件,最后被我发现scoop,省去了到处下载XXX绿色版的烦恼,当然scoop里需要管理员权限的软件也跟我无缘了(譬如everything)。推荐添加dorado这个bucket镜像,里面很多中文软件,但是部分国外的软件下载地址在github,可能无法下载。以上两个是官方bucket的国内镜像,所有软件建议优先从这里下载。上面可以看到很多bucket以及软件数。如果官网登陆不了可以试一下以下方式。_scoop-cn
Element ui colorpicker在Vue中的使用_vue el-color-picker-程序员宅基地
文章浏览阅读4.5k次,点赞2次,收藏3次。首先要有一个color-picker组件 <el-color-picker v-model="headcolor"></el-color-picker>在data里面data() { return {headcolor: ’ #278add ’ //这里可以选择一个默认的颜色} }然后在你想要改变颜色的地方用v-bind绑定就好了,例如:这里的:sty..._vue el-color-picker
迅为iTOP-4412精英版之烧写内核移植后的镜像_exynos 4412 刷机-程序员宅基地
文章浏览阅读640次。基于芯片日益增长的问题,所以内核开发者们引入了新的方法,就是在内核中只保留函数,而数据则不包含,由用户(应用程序员)自己把数据按照规定的格式编写,并放在约定的地方,为了不占用过多的内存,还要求数据以根精简的方式编写。boot启动时,传参给内核,告诉内核设备树文件和kernel的位置,内核启动时根据地址去找到设备树文件,再利用专用的编译器去反编译dtb文件,将dtb还原成数据结构,以供驱动的函数去调用。firmware是三星的一个固件的设备信息,因为找不到固件,所以内核启动不成功。_exynos 4412 刷机
Linux系统配置jdk_linux配置jdk-程序员宅基地
文章浏览阅读2w次,点赞24次,收藏42次。Linux系统配置jdkLinux学习教程,Linux入门教程(超详细)_linux配置jdk
随便推点
matlab(4):特殊符号的输入_matlab微米怎么输入-程序员宅基地
文章浏览阅读3.3k次,点赞5次,收藏19次。xlabel('\delta');ylabel('AUC');具体符号的对照表参照下图:_matlab微米怎么输入
C语言程序设计-文件(打开与关闭、顺序、二进制读写)-程序员宅基地
文章浏览阅读119次。顺序读写指的是按照文件中数据的顺序进行读取或写入。对于文本文件,可以使用fgets、fputs、fscanf、fprintf等函数进行顺序读写。在C语言中,对文件的操作通常涉及文件的打开、读写以及关闭。文件的打开使用fopen函数,而关闭则使用fclose函数。在C语言中,可以使用fread和fwrite函数进行二进制读写。 Biaoge 于2024-03-09 23:51发布 阅读量:7 ️文章类型:【 C语言程序设计 】在C语言中,用于打开文件的函数是____,用于关闭文件的函数是____。
Touchdesigner自学笔记之三_touchdesigner怎么让一个模型跟着鼠标移动-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏13次。跟随鼠标移动的粒子以grid(SOP)为partical(SOP)的资源模板,调整后连接【Geo组合+point spirit(MAT)】,在连接【feedback组合】适当调整。影响粒子动态的节点【metaball(SOP)+force(SOP)】添加mouse in(CHOP)鼠标位置到metaball的坐标,实现鼠标影响。..._touchdesigner怎么让一个模型跟着鼠标移动
【附源码】基于java的校园停车场管理系统的设计与实现61m0e9计算机毕设SSM_基于java技术的停车场管理系统实现与设计-程序员宅基地
文章浏览阅读178次。项目运行环境配置:Jdk1.8 + Tomcat7.0 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。项目技术:Springboot + mybatis + Maven +mysql5.7或8.0+html+css+js等等组成,B/S模式 + Maven管理等等。环境需要1.运行环境:最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。_基于java技术的停车场管理系统实现与设计
Android系统播放器MediaPlayer源码分析_android多媒体播放源码分析 时序图-程序员宅基地
文章浏览阅读3.5k次。前言对于MediaPlayer播放器的源码分析内容相对来说比较多,会从Java-&amp;gt;Jni-&amp;gt;C/C++慢慢分析,后面会慢慢更新。另外,博客只作为自己学习记录的一种方式,对于其他的不过多的评论。MediaPlayerDemopublic class MainActivity extends AppCompatActivity implements SurfaceHolder.Cal..._android多媒体播放源码分析 时序图
java 数据结构与算法 ——快速排序法-程序员宅基地
文章浏览阅读2.4k次,点赞41次,收藏13次。java 数据结构与算法 ——快速排序法_快速排序法