【Baidu Apollo】6.2 Lattice Planner规划算法_lattice算法-程序员宅基地
一、Lattice Planner 总体概览
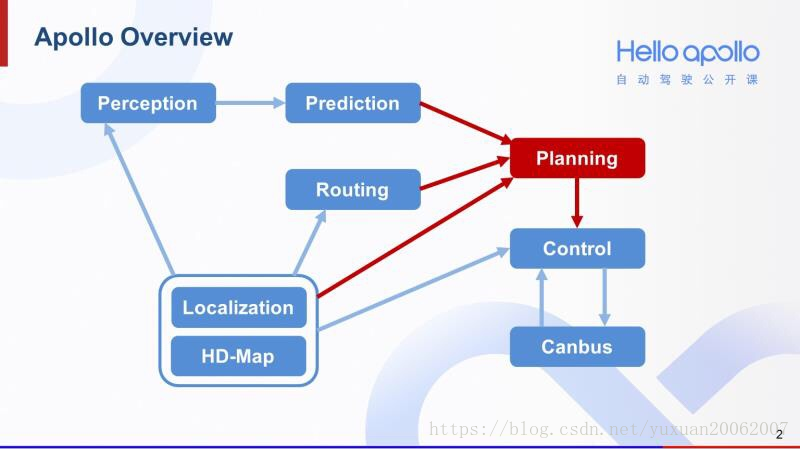
Lattice算法隶属于规划模块。规划模块以预测模块、routing模块、高精地图和定位的结果作为输入,通过算法,输出一条平稳、舒适、安全的轨迹,交给控制模块去执行。我们可以看到,规划模块在Apollo中是一个承上启下的重要模块。
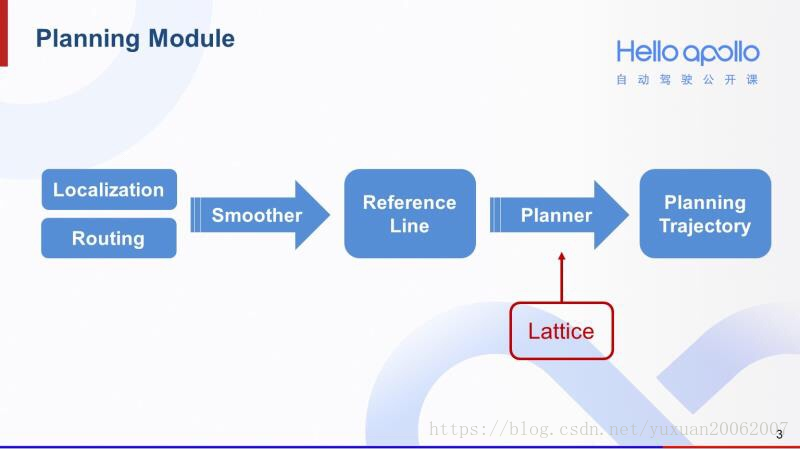
这是Apollo中规划模块的工作流程。首先是依据routing和定位,通过平滑算法,生成一条平滑的参考线(平滑的道路中心线)。再通过规划算法,生成一条符合交规,安全舒适的规划轨迹。那么Lattice算法就是Apollo开源平台中,其中的一种规划算法。
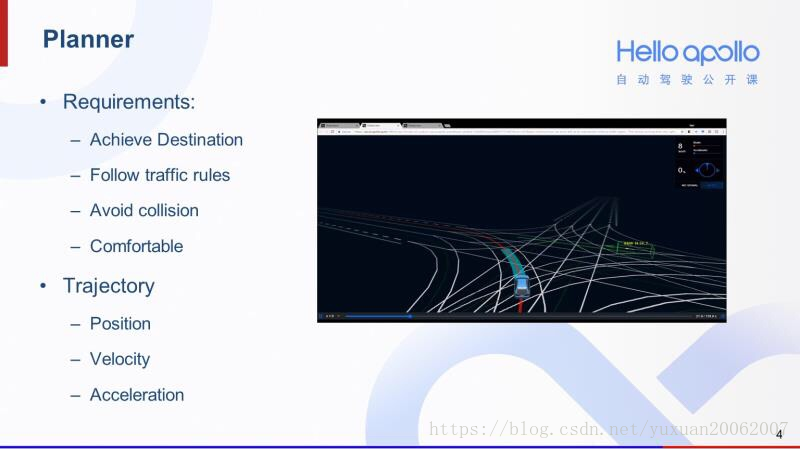
一个合格规划算法,必须满足几个条件。首先,必须能够使自动驾驶汽车到达目的地;其次,必须符合交规;第三,能够避免碰撞;最后,也需要能保证一定的舒适性。
在Apollo中,规划算法的输出是一系列轨迹点连成的轨迹。每一个轨迹点包含位置,速度,加速的等信息。
二、Lattice 规划算法的工作流程
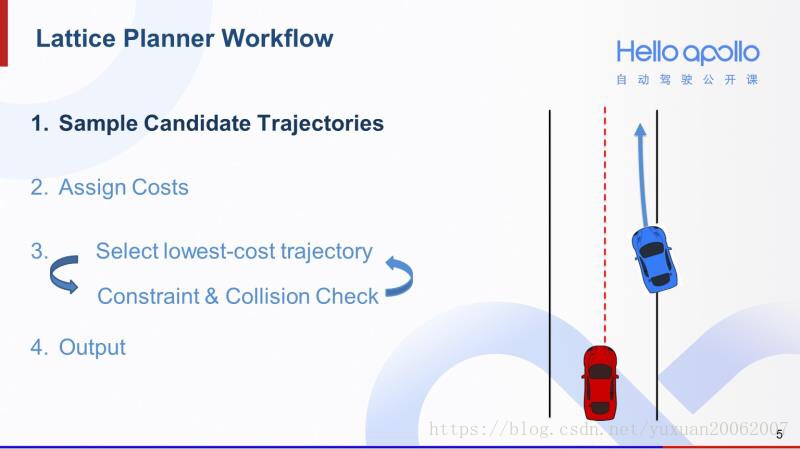
下面我来介绍一下Lattice规划算法的工作流程。我们以右图中的场景为例。其中红车是我们的自动驾驶汽车,蓝车是其他障碍车,前面蓝色带尖头的曲线是蓝车的预测轨迹。那么这是一个前方即将有车辆并入的场景。
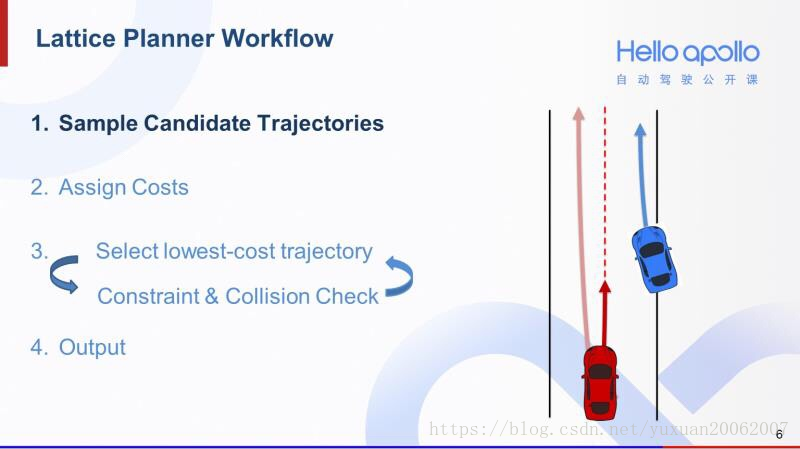
面对这样的场景,有些司机会按照右图中浅红色的轨迹,选择绕开蓝色的障碍车。另外有一些司机开车相对保守,会沿着右图中深红色较短的轨迹做一个减速,给蓝色障碍车让路。
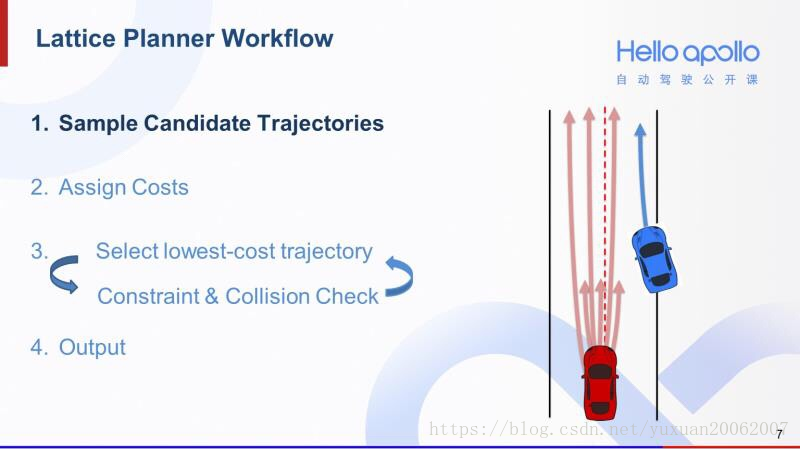
既然对于同一个场景,人类司机会有多种处理方法,那么Lattice规划算法的第一步就是采样足够多的轨迹,提供尽可能多的选择。
Lattice规划算法的第二步是计算每一条轨迹计算的cost。这个cost考虑了轨迹的可行性、安全性等因素。我会在后面为大家详细介绍。
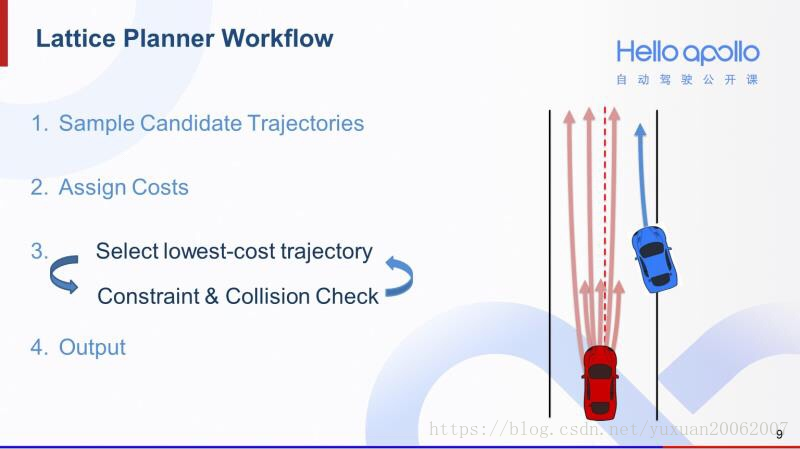
那么有了轨迹的cost以后,第三步就是一个循环检测的过程。在这个过程中,我们每次会先挑选出cost最低的轨迹,对其进行物理限制检测和碰撞检测。如果挑出来的轨迹不能同时通过这两个检测,就将其筛除,考察下一条cost最低的轨迹。
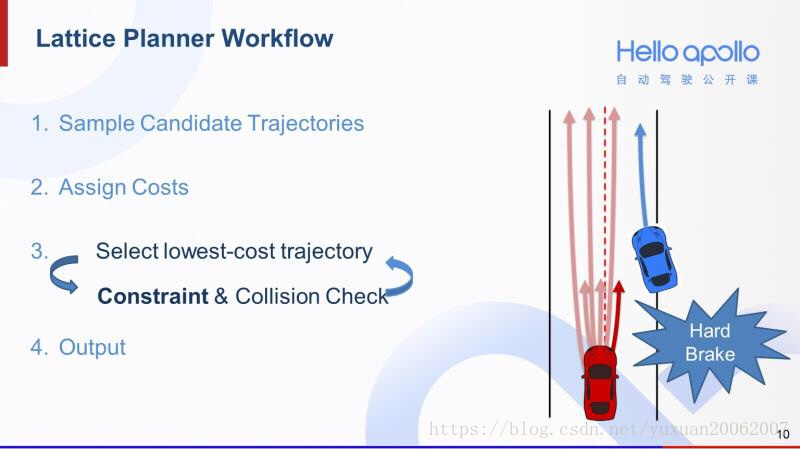
以右图为例,假设我们首先挑选出cost最低的是深红色较短的轨迹。但我们发现即便猛踩刹车也无法执行这条轨迹。也就是说,这条轨迹超出了汽车的减速度上限。那么它就无法通过物理限制检测,我们会将其筛除。
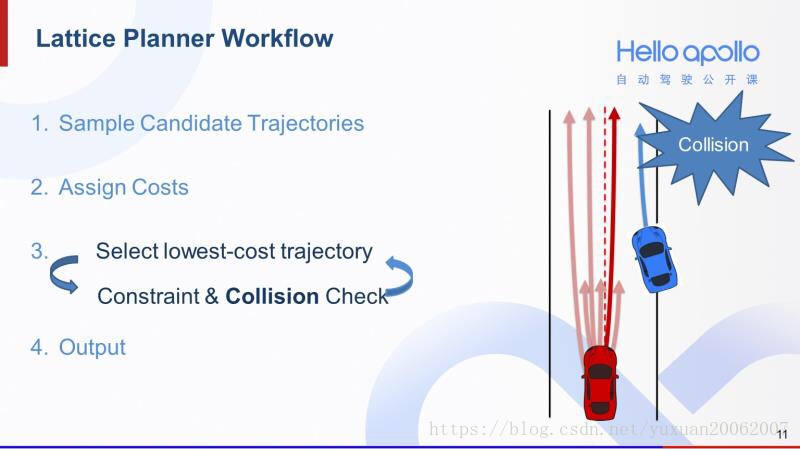
假设我们下一条选出来cost最低的轨迹是右图中深红色较长的轨迹。我们会发现若沿着这条轨迹前进,红车会和蓝色障碍车发生碰撞。也就是说,这条轨迹轨迹无法通过碰撞检测。于是只能放弃这条轨迹,考虑下一条cost最低的。
这样的过程循环继续下去,假设我们现在挑选出右图中靠左边的深红色轨迹,它既符合汽车的物理性状,也不会有碰撞风险。
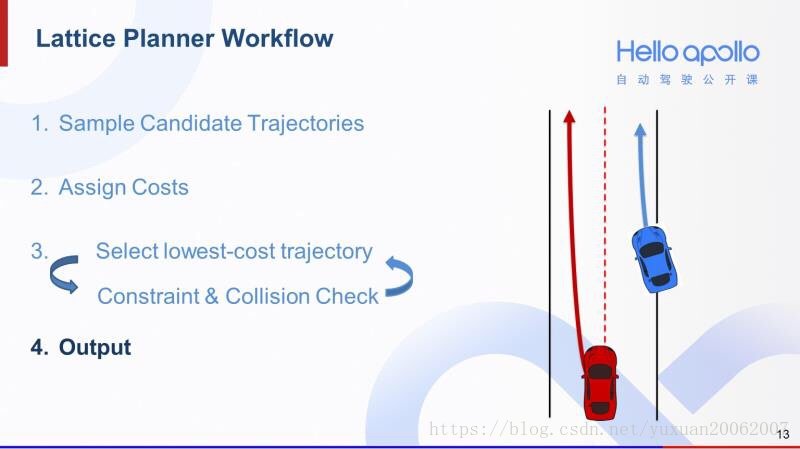
最终就将这条轨迹作为规划轨迹输出。
三、Lattice Planner的采样过程
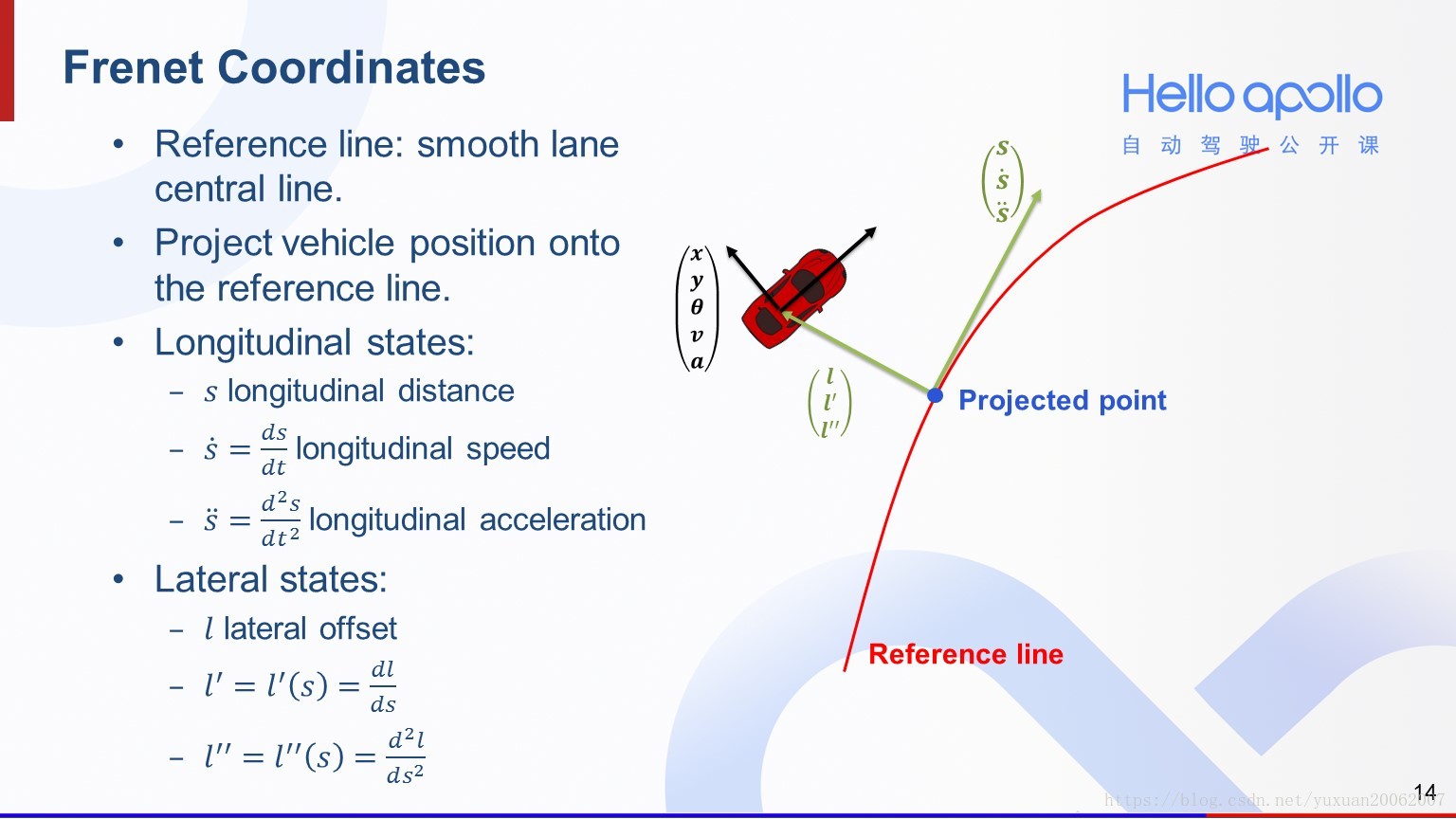
首先是采样过程。在正式介绍采样过程之前,作为铺垫,先来介绍一下Frenet坐标系。在二维平面中,通常采用X-Y坐标系来描述问题。但在自动驾驶规划问题中,我们的工作是基于道路的。这种情况下,X-Y坐标系并不是最方便的。所以我们这里需要使用基于车道线横向和纵向的Frenet坐标系。
那么如何用Frenet坐标系来表示一辆汽车的状态呢?首先有一条光滑的参考线(右图中红线),可以按右图所示将汽车的坐标点投影到参考线上,得到一个参考线上的投影点(图中蓝色点)。从参考线起点到投影点的路径长度就是汽车在Frenet坐标系下的纵向偏移量,用S表示。而投影点到汽车位置的距离则是汽车在Frenet坐标系下的横向偏移量,用L表示。因为参考线是足够光滑的,也可通过汽车的朝向、速度、加速度来计算出Frenet坐标系下,横向和纵向偏移量的一阶导和二阶导。
这里需要注意的是,我们将横向偏移量L设计成纵向偏移量S的函数。这是因为对于大多数的汽车而言,横向运动是由纵向运动诱发的。
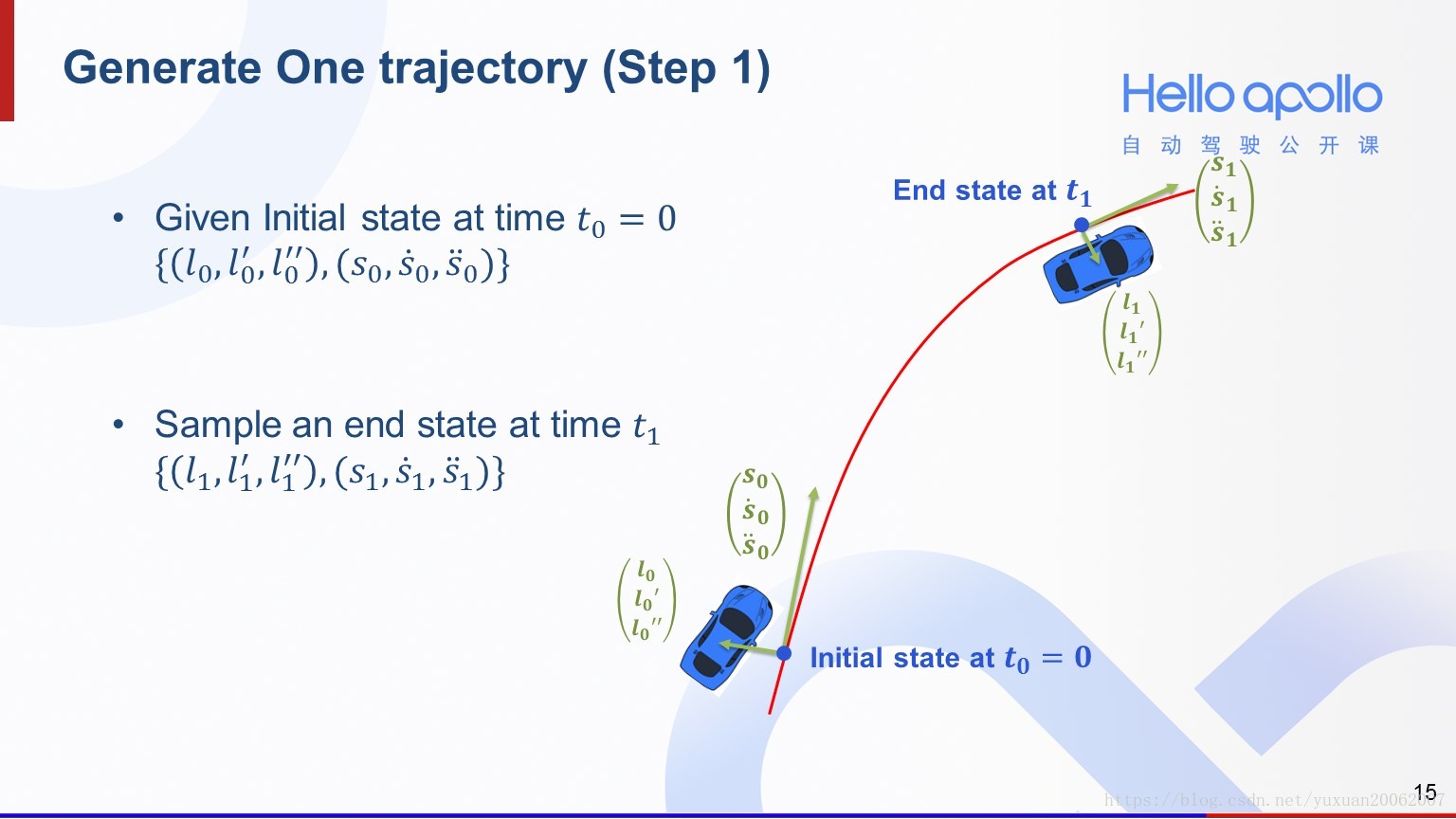
有了Frenet坐标系的概念,下面来介绍一下如何生成一条轨迹。首先我们可以通过计算得到自动驾驶汽车在Frenet坐标系下的在零时刻的起始状态,也就是汽车的当前状态。为了生成一条轨迹,第一步就是在Frenet坐标系下采样一个在T1时刻的末状态。
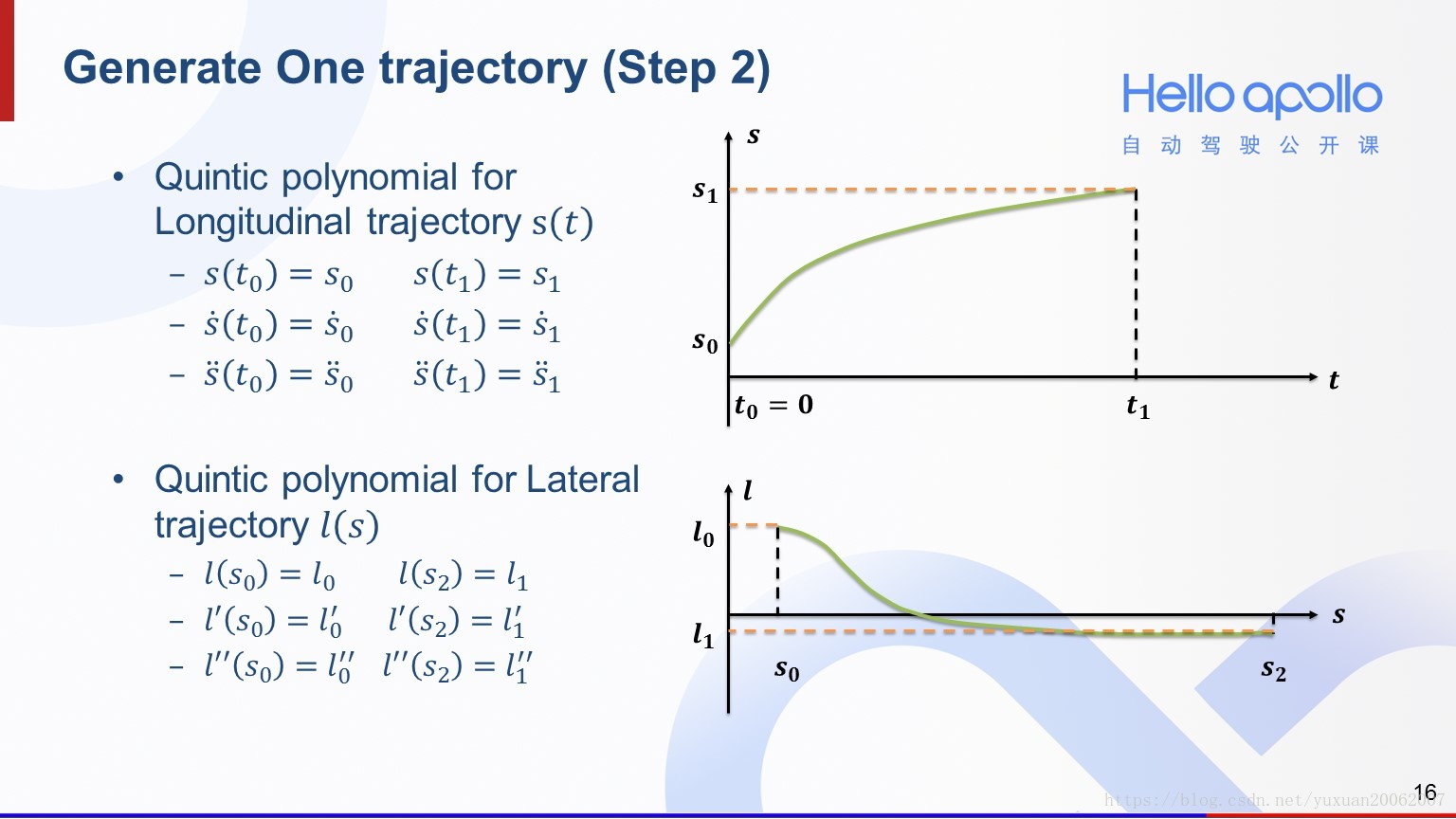
第二步就是将末状态和起始状态做多项式拟合。分别形成横向和纵向的多项式轨迹。
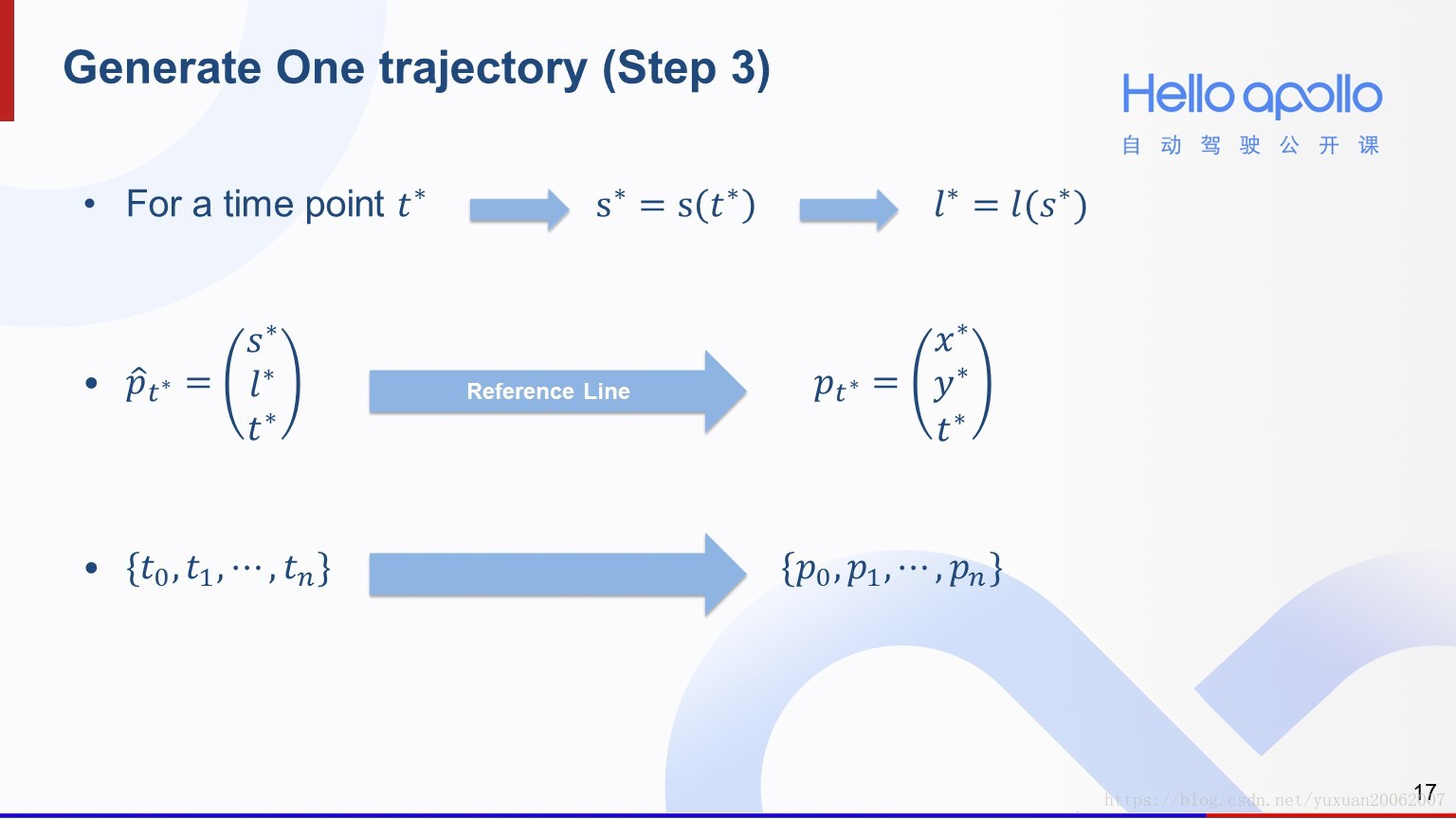
有了横向轨迹和纵向轨迹之后,第三步就是二维合成。给定一个时刻T*,可以计算出在T*时刻的纵向偏移量和横向偏移量,再通过参考线,即可还原成一个二维平面中的轨迹点。通过一系列的时间点T0,T1,...,Tn,可以获得一系列的轨迹点P0,P1,…,Pn,最终形成一条完整的轨迹。了解了如何生成一条轨迹之后,下面介绍一下如何采样一系列轨迹。
四、如何采样横向和纵向轨迹
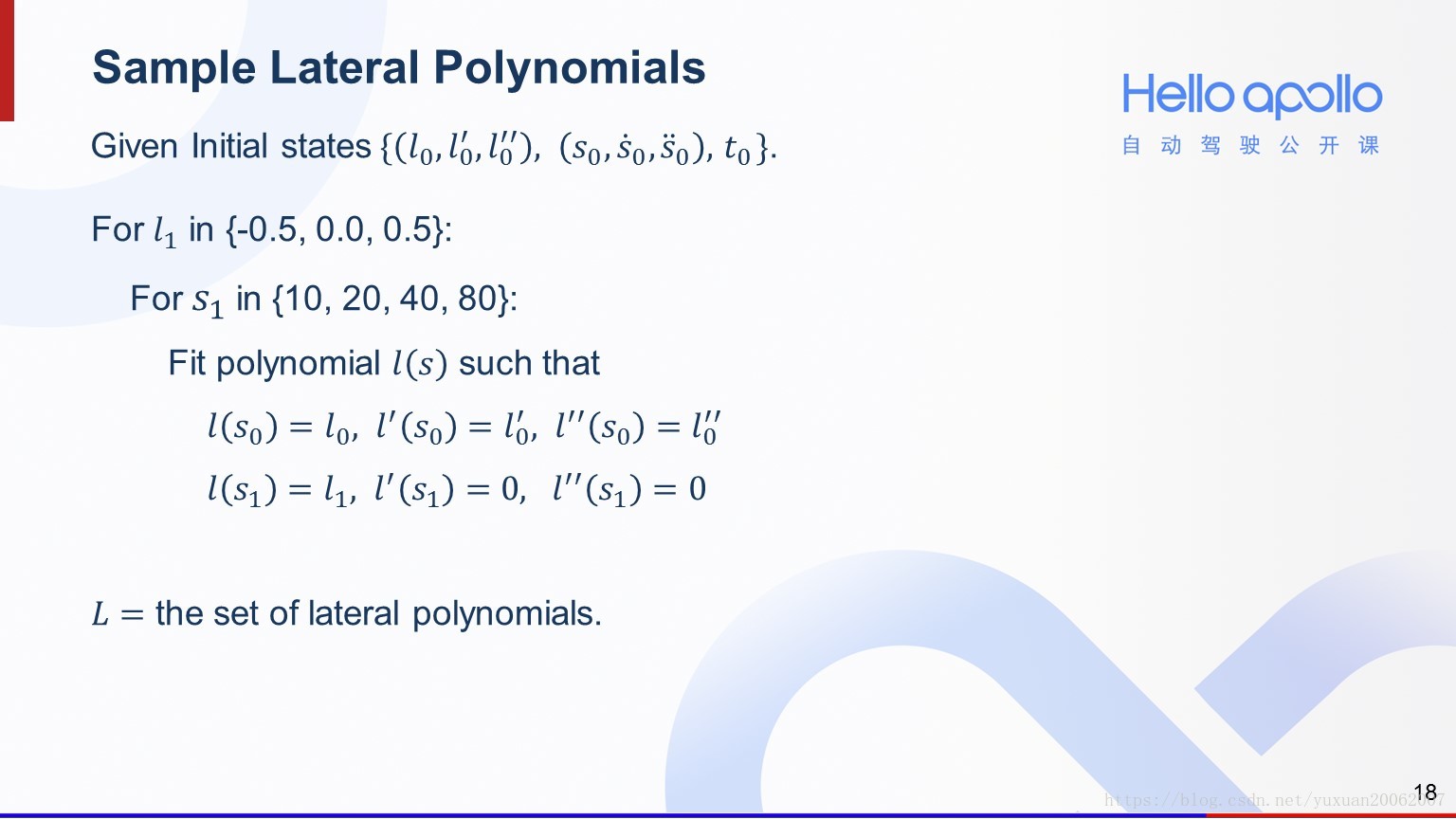
首先介绍如何采样横向轨迹。横向轨迹的采样需要涵盖多种横向运动状态。现在Apollo的代码中设计了三个末状态横向偏移量,-0.5,0.0和0.5,以及四个到达这些横向偏移量的纵向位移,分别为10,20,40,80。用两层循环遍历各种组合,再通过多项式拟合,即可获得一系列的横向轨迹。
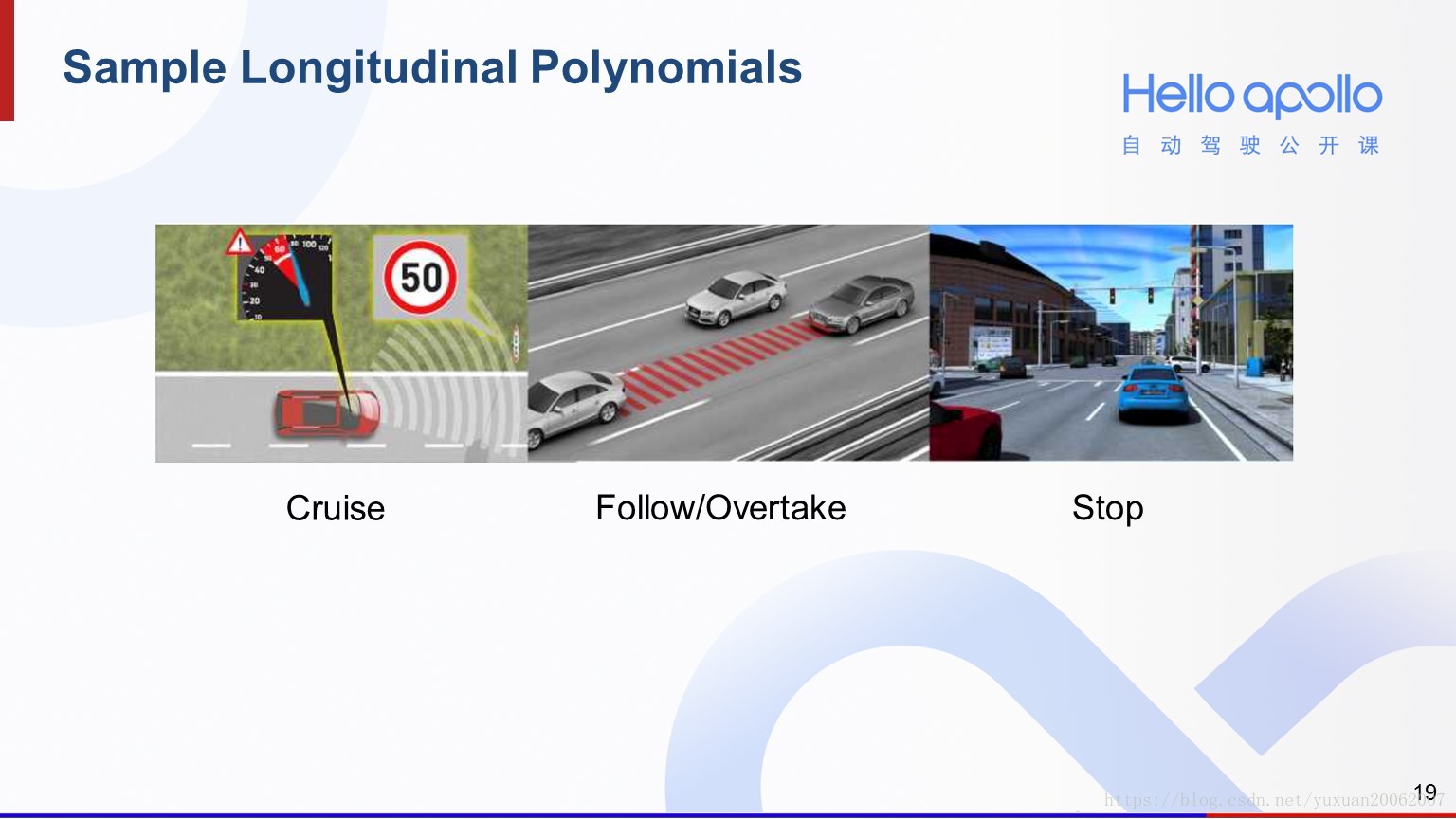
对于纵向轨迹的采样,需要考虑巡航、跟车或超车、停车这三种状态。
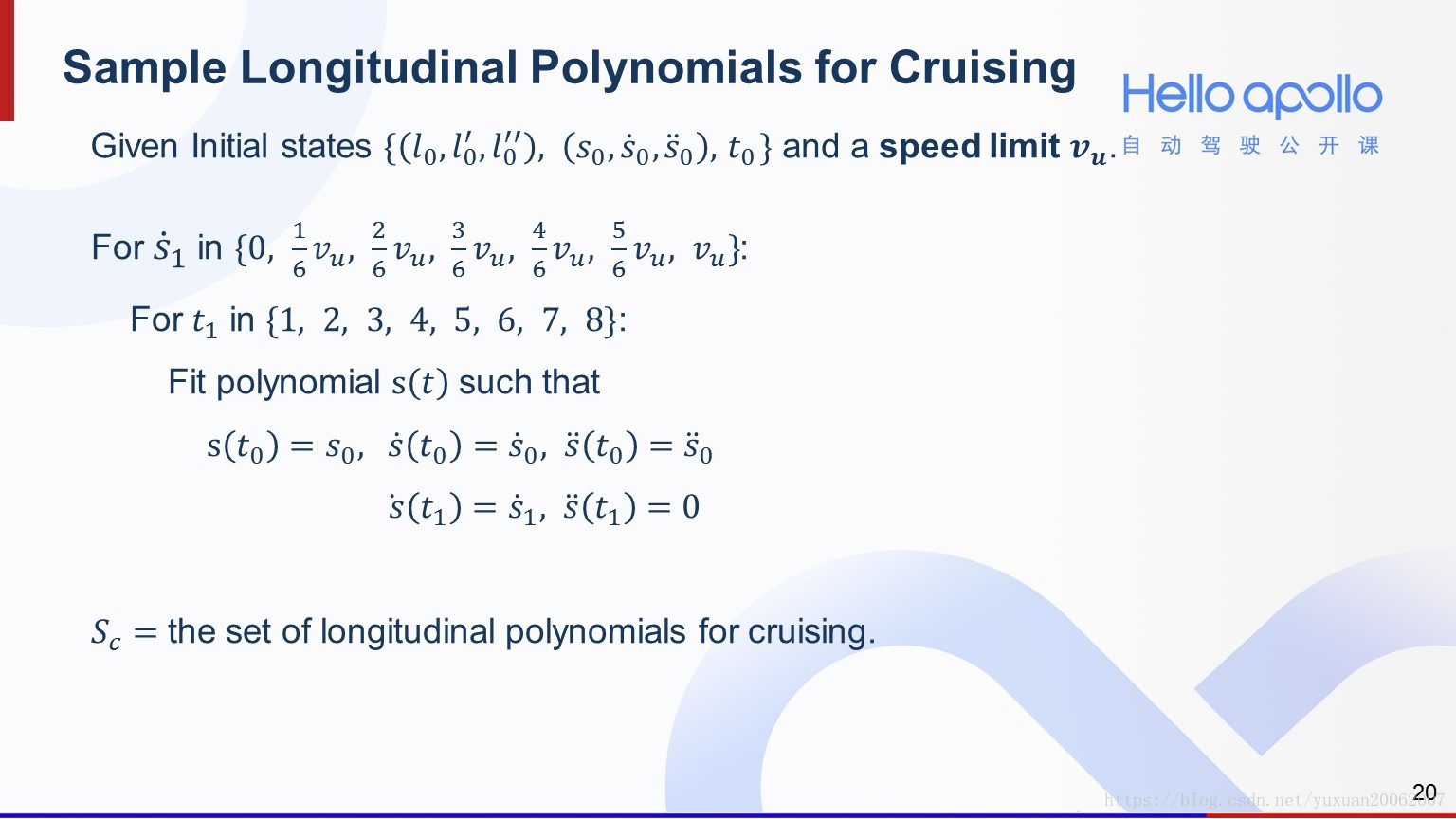
对于巡航状态,通过两层循环来完成采样。外层循环将速度从零到上限值按等间隔均匀遍历。内层循环遍历到达末状态速度的时间,从1秒到8秒按1秒的间隔均匀遍历。由于巡航状态不需要指明到达末状态的S值,所以这里只需要用四次多项式拟合即可。
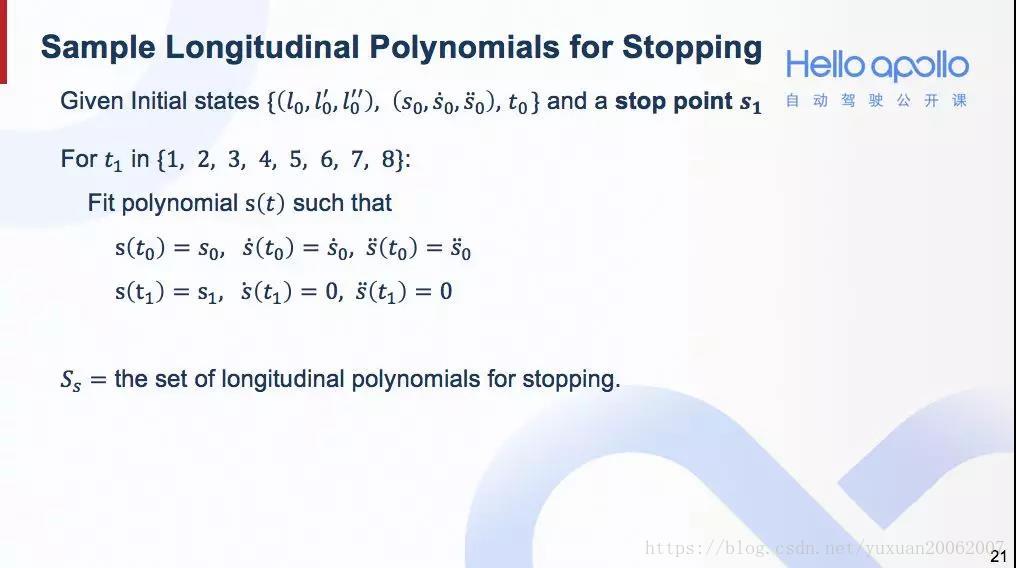
在停车状态中,给定停车点,末状态的速度和加速度都是零,所以末状态是确定的。
那么我们只需用一层循环来采样到达停车点的时间即可。
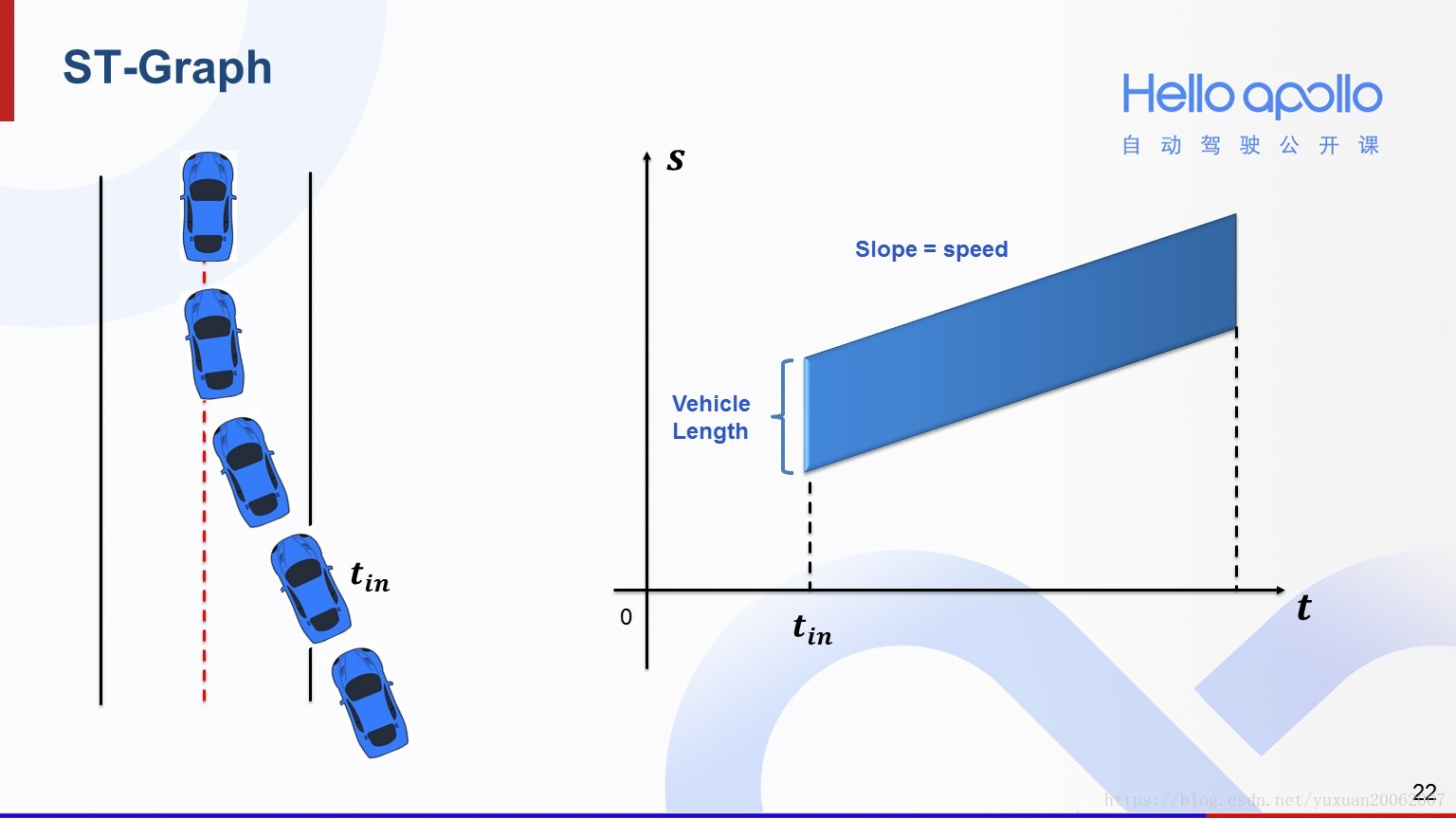
在介绍跟车/超车的采样逻辑之前,需要介绍一下S-T图的概念。以左图中的场景为例,蓝色障碍车从车道右侧切入,在T_in时刻开始进入当前车道。那么这个场景对应的S-T图就如右图所示。从T_in时刻开始出现一块斜向上的阴影区域。这块阴影区域的高度就是蓝色障碍车的车身长,上边界表示车头,下边界表示车尾,斜率表示车速。
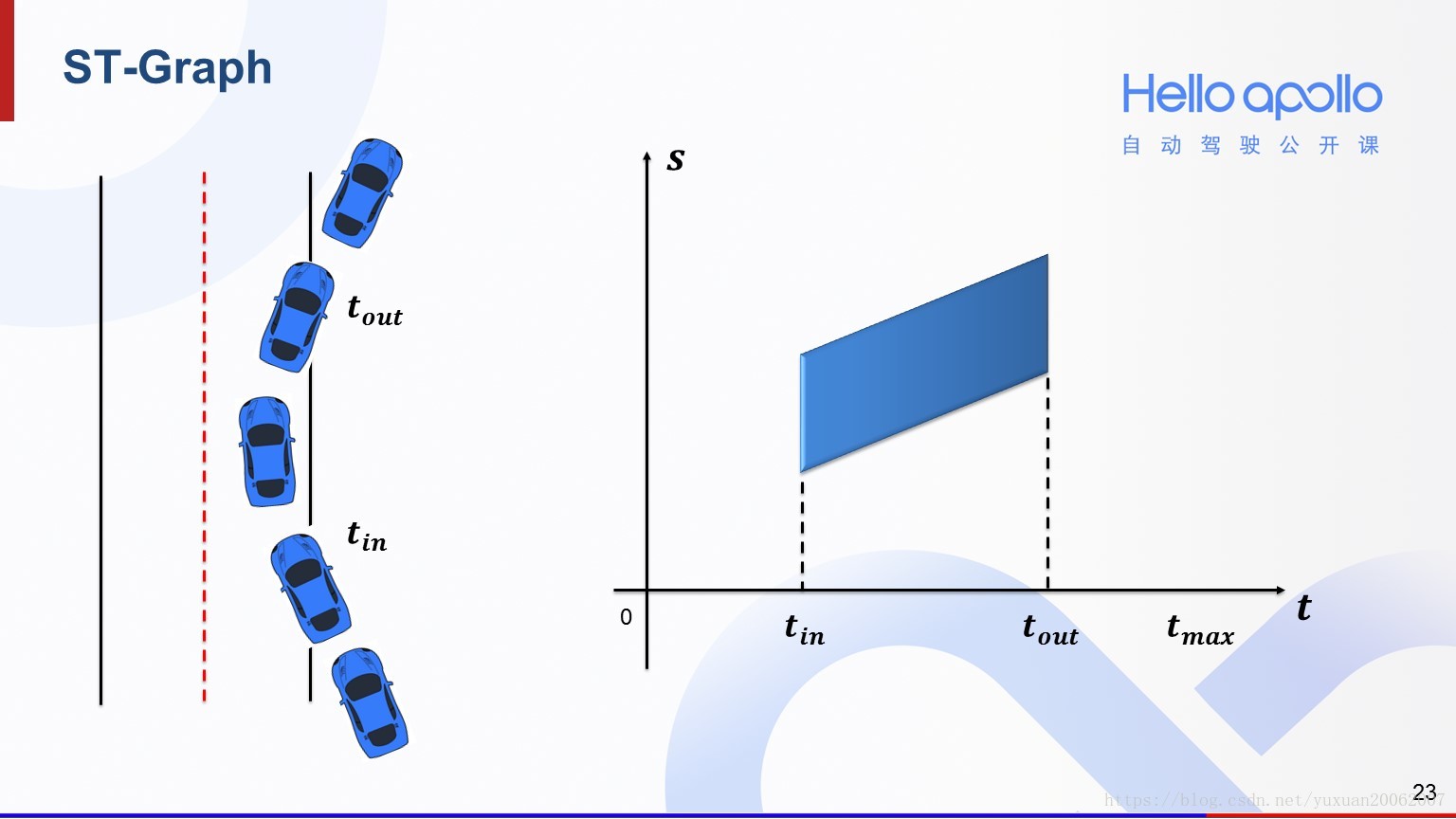
如果上述场景变成这样,障碍车从T_in时刻进入车道,然后在T_out时刻离开车道。那么这个场景对应的S-T图就会缩短。
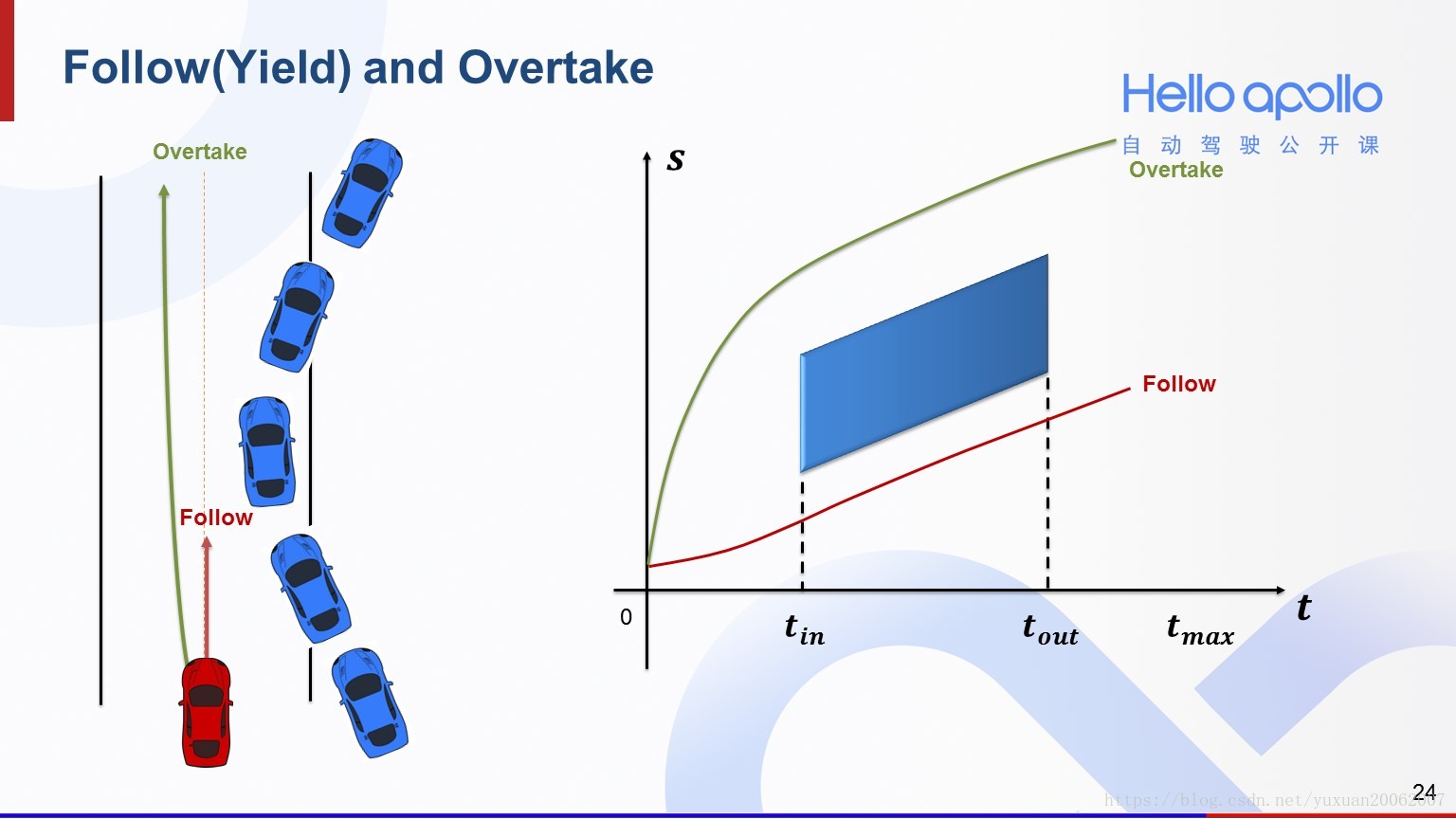
有了S-T图的概念,观察左图中的两条规划轨迹。红色的是一条跟车轨迹,绿色的是超车轨迹。这两条轨迹反映在S-T图中,就如右图所示。红色的跟车轨迹在蓝色阴影区域下方,绿色的超车轨迹在蓝色阴影区域上方。
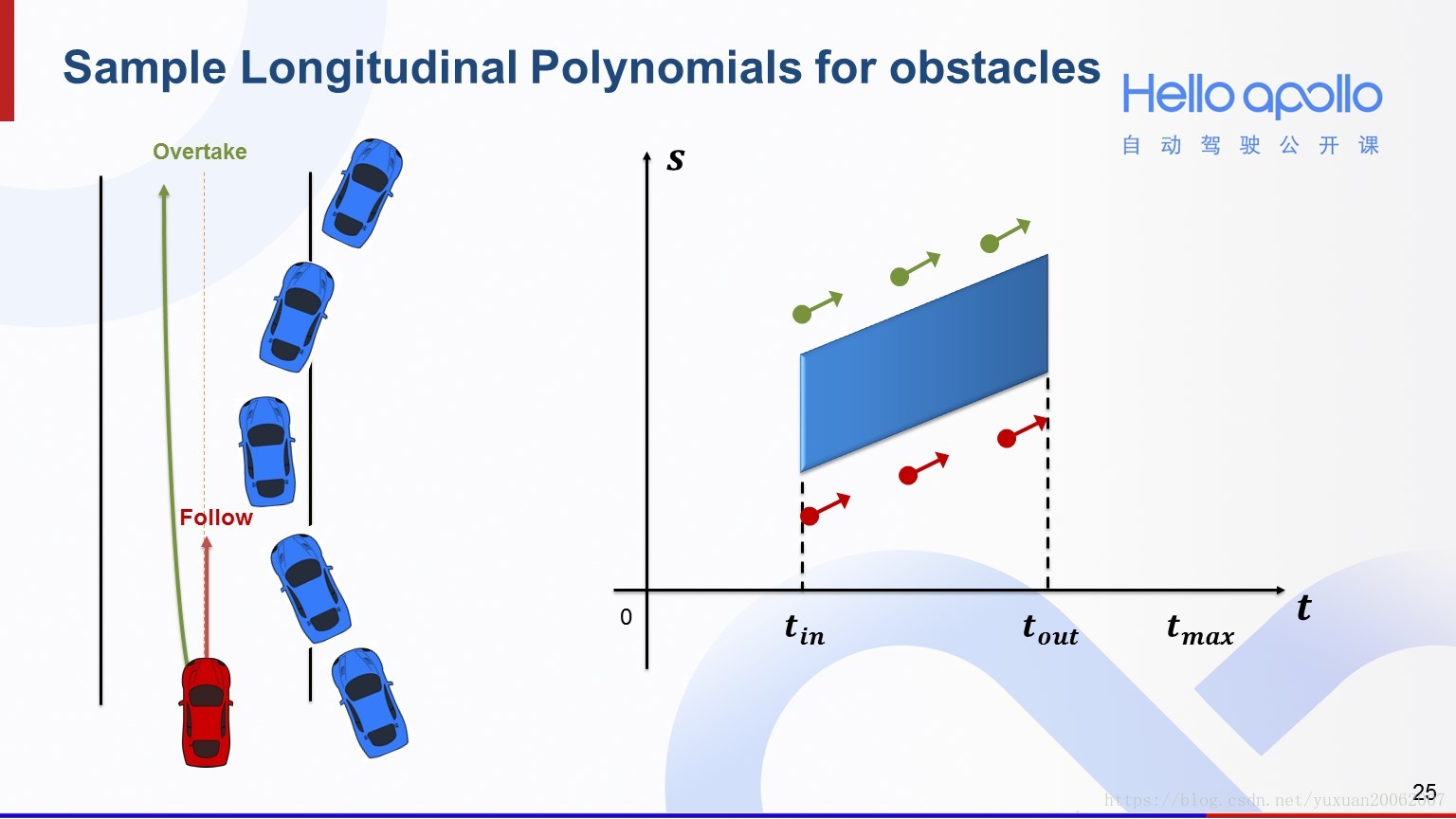
采样末状态时,就可以分别在S-T图中障碍物对应的阴影区域的上方和下方分别采样。上方的末状态对应超车,下方的末状态对应跟车。

如果有多个障碍物,就对这些障碍物分别采样超车和跟车所对应的末状态。
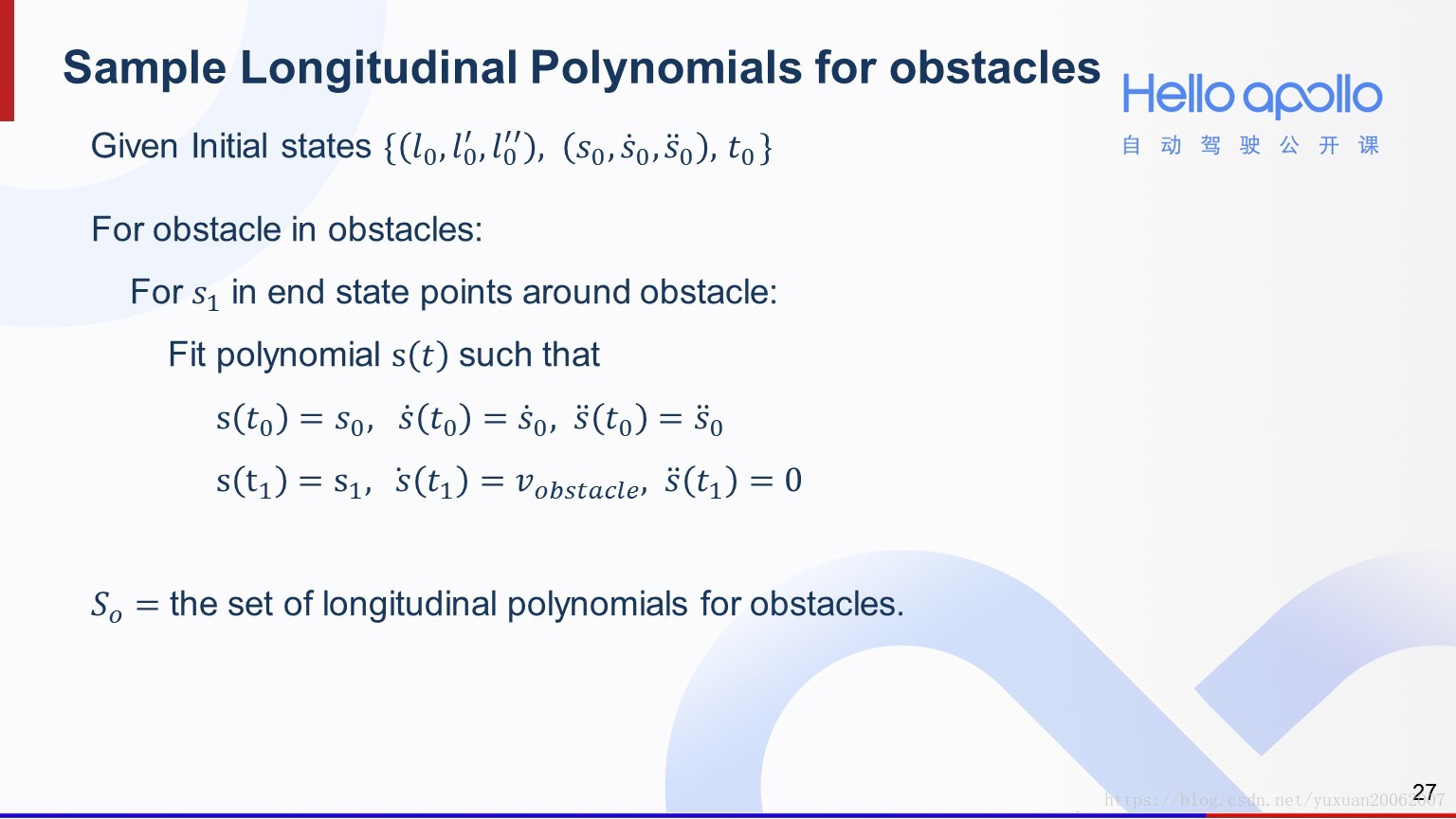
那么总结下来就是遍历所有和车道有关联的障碍物,对他们分别采样超车和跟车的末状态,然后用多项式拟合即可获得一系列纵向轨迹。
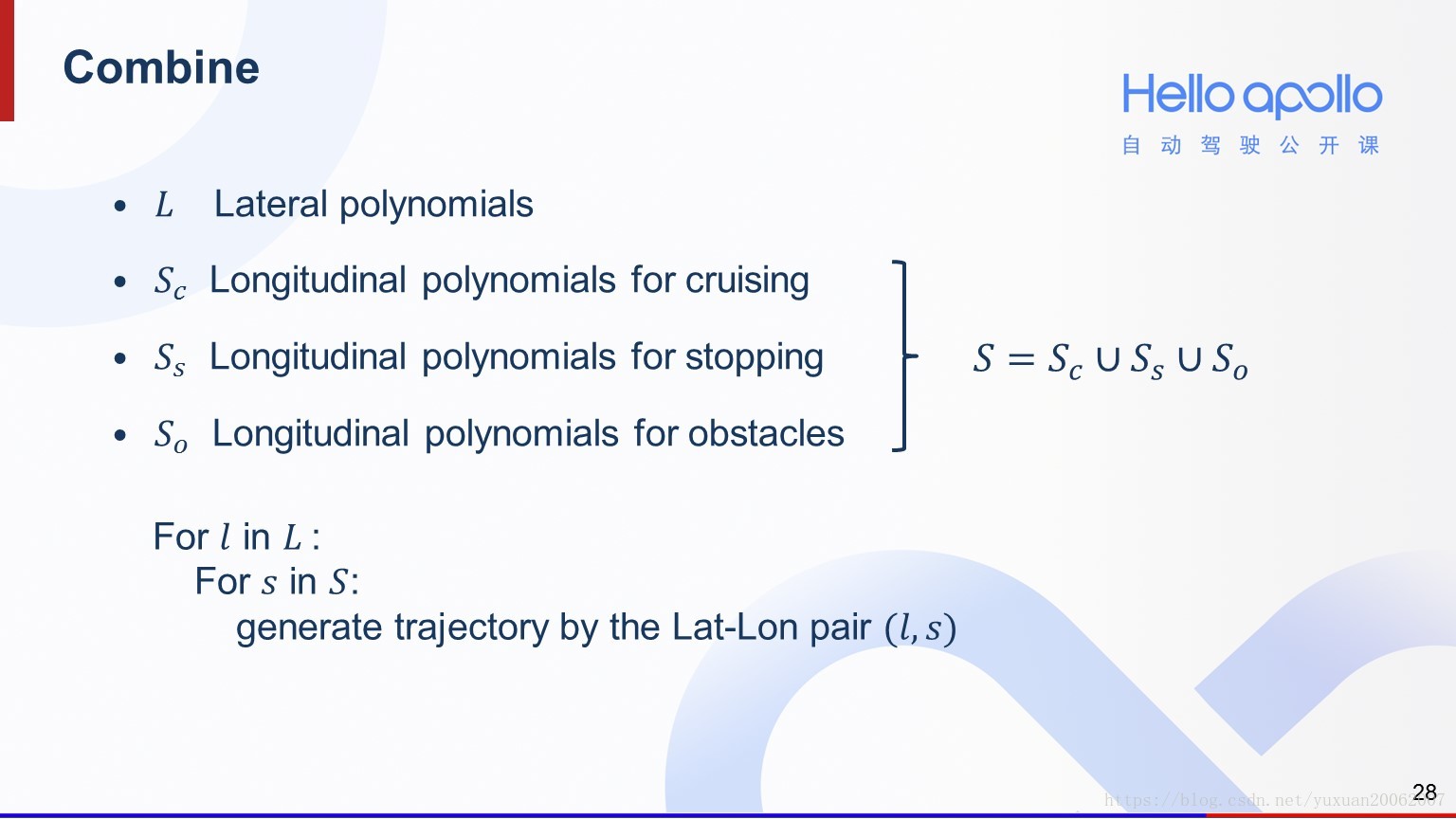
将三组纵向轨迹组合起来,就可以获得所有纵向轨迹。再将所有纵向轨迹和所有横向轨迹两两配对二维合成,就可以完成轨迹采样的工作。
五、轨迹COST的实现方法
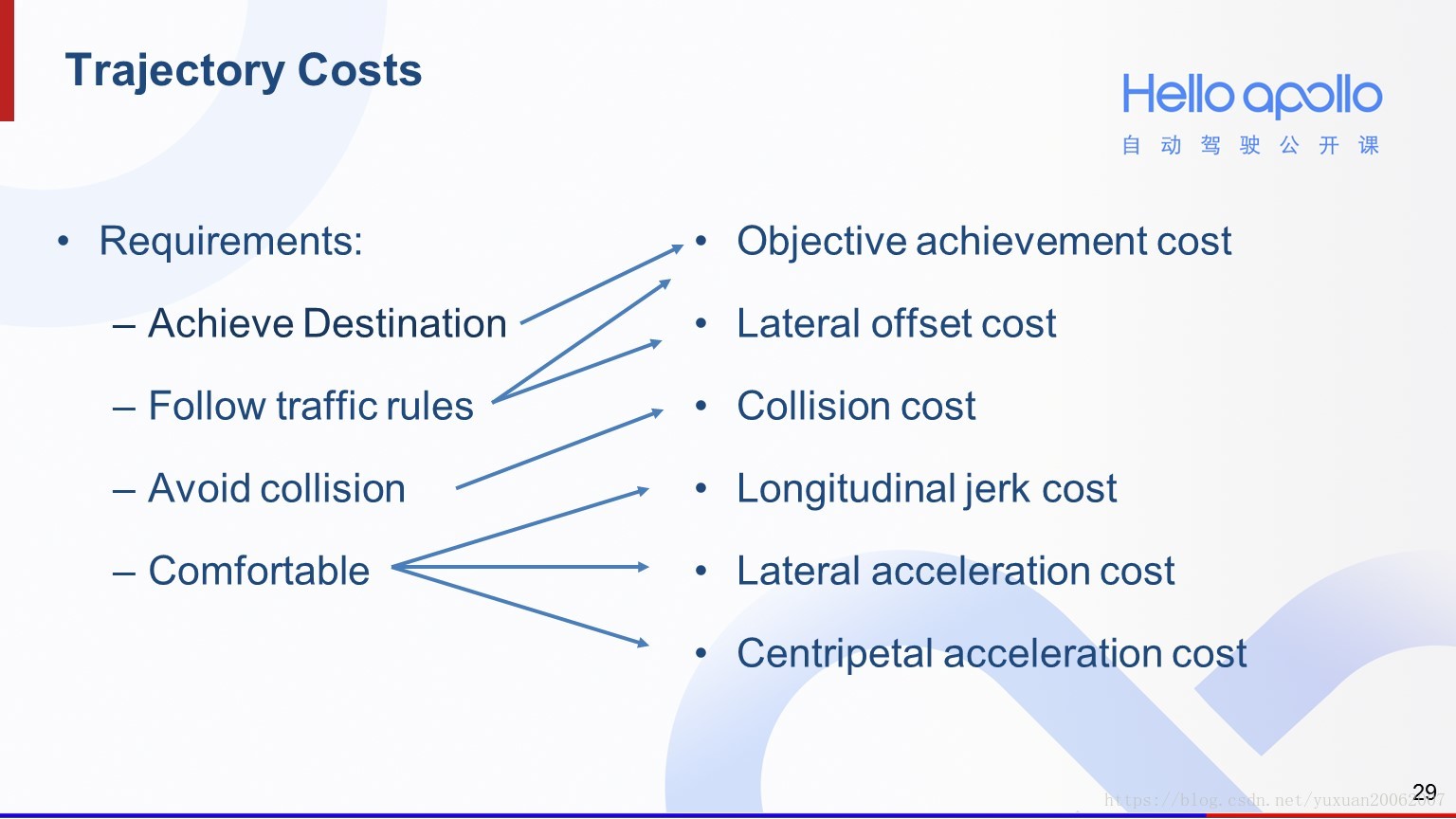
现在介绍一下轨迹的cost的实现方法。前面提到,轨迹规划所需要满足的四点要求,分别是到达目的、符合交规,避免碰撞、平稳舒适。针对这四点要求,我们设计了六个cost,cost越高就表示越不满足要求。下面一一介绍这六个cost的设计思路。
首先是到达目的的cost。分成两种情况,一个是存在停车指令(比如红灯)的情况,另一个是没有停车指令的。如果存在停车指令,相对大的车速,其对应的轨迹cost就越大;如果没有停车指令,那么低速轨迹的cost就会越大。
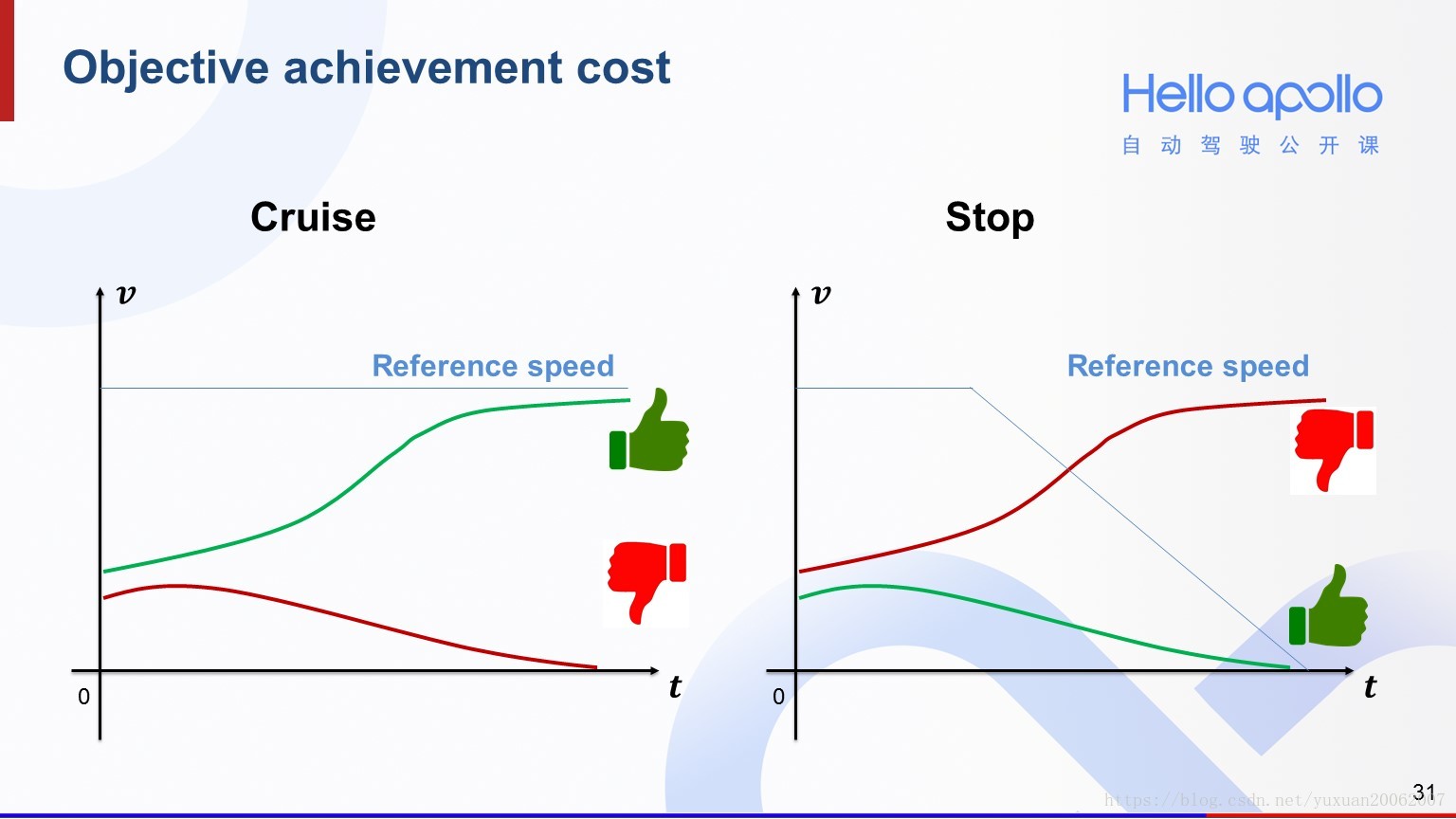
怎么实现这样的效果呢?针对这两种情况分别设计了参考速度。左图蓝线表示没有停车指令时的参考速度。可以看到这种情况下,绿色的加速轨迹会获得一个较小的cost,而红色的减速轨迹会获得一个相对较大的cost。那么如果存在停车指令,参考速度就会想右图中的蓝色曲线一样呈下降趋势。那么这种情况下,同样的两条轨迹,他们的cost大小关系就会正好相反。
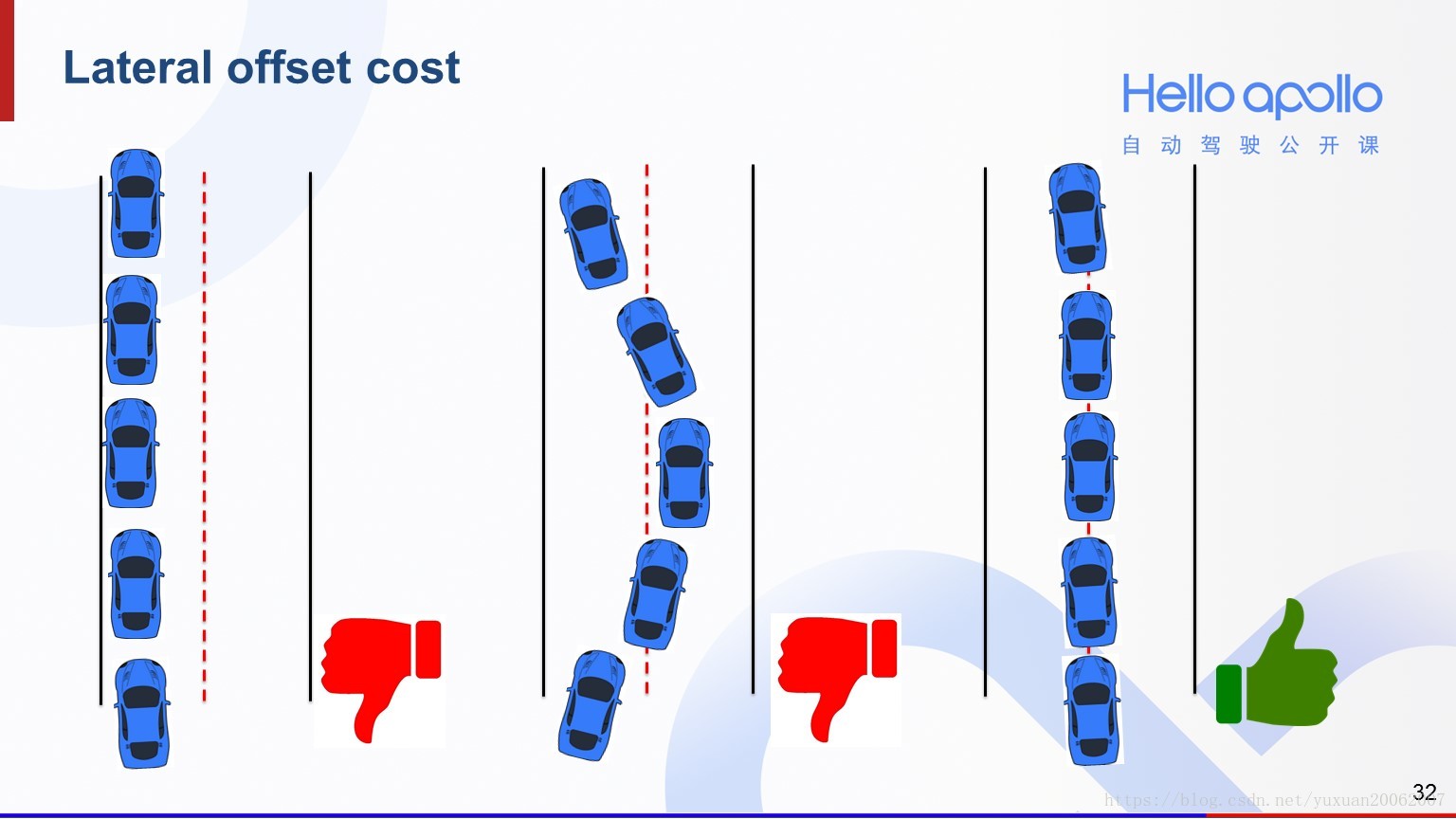
第二个cost是横向偏移cost。设计这个cost是为了让自动驾驶汽车能尽量沿着道路中心行驶。那么像左图汽车靠道路一边行驶,和中图画龙的行驶轨迹,他们的cost都相对较高。
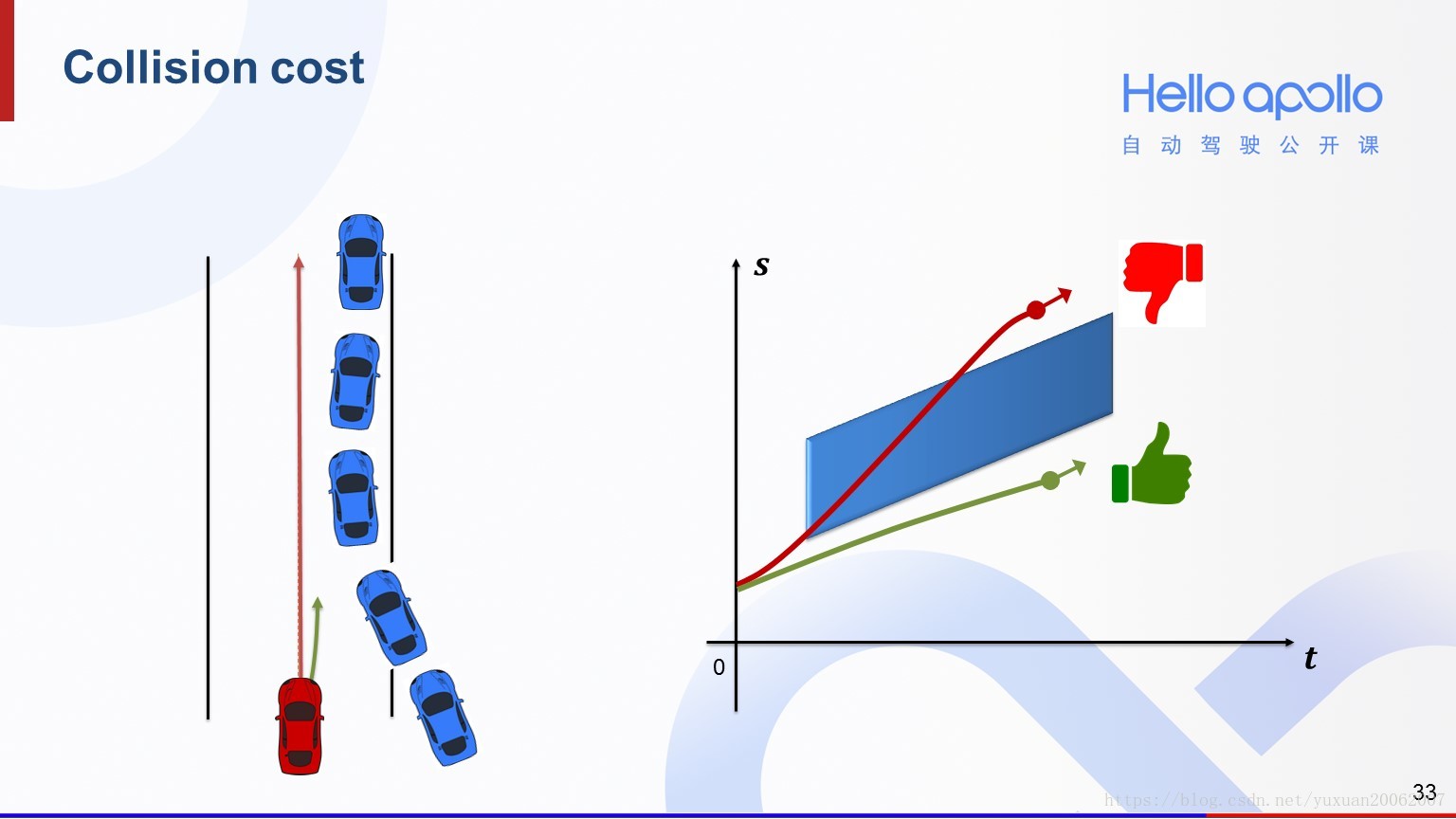
第三个cost是碰撞cost。左图中的两条轨迹,反映在右图S-T图中,我们可以发现红色的轨迹和蓝色障碍车在S-T图中的阴影区域有重叠,说明有碰撞风险,那么它的碰撞cost就会相对较高。而绿色的轨迹在S-T图中反映出来的碰撞风险较小,那么它的碰撞cost就相对较低。
第四个cost是纵向加加速度的cost。加加速度(jerk)是加速度对时间的导数,表示加速度的变化率。我们用加加速度的最大值值来表示这个cost。
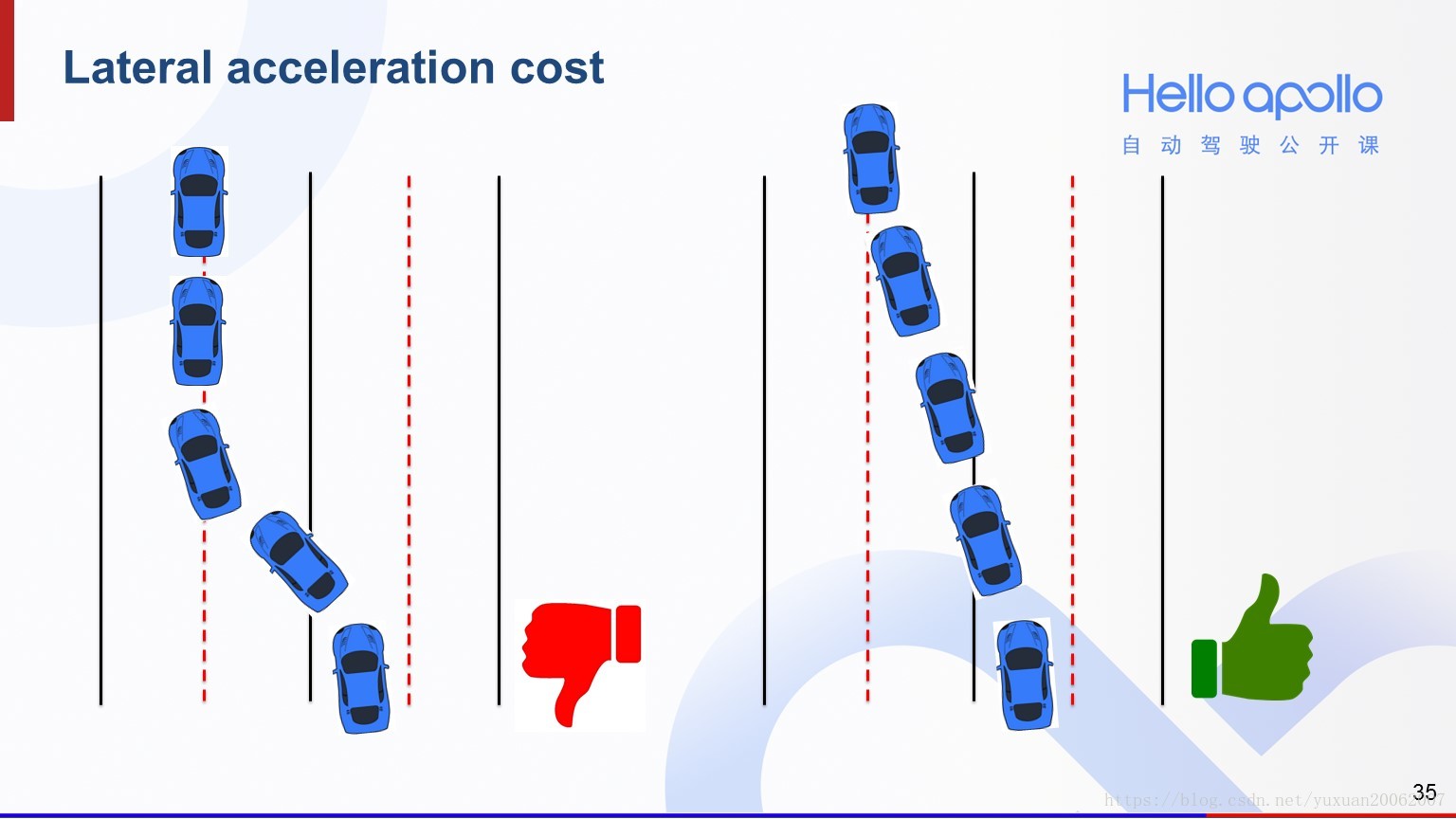
第五个cost是横向加速度的cost。设计这个cost是为了平稳地换道。那么像左图猛打方向盘的轨迹,它的横向加速度cost就会相对较大。
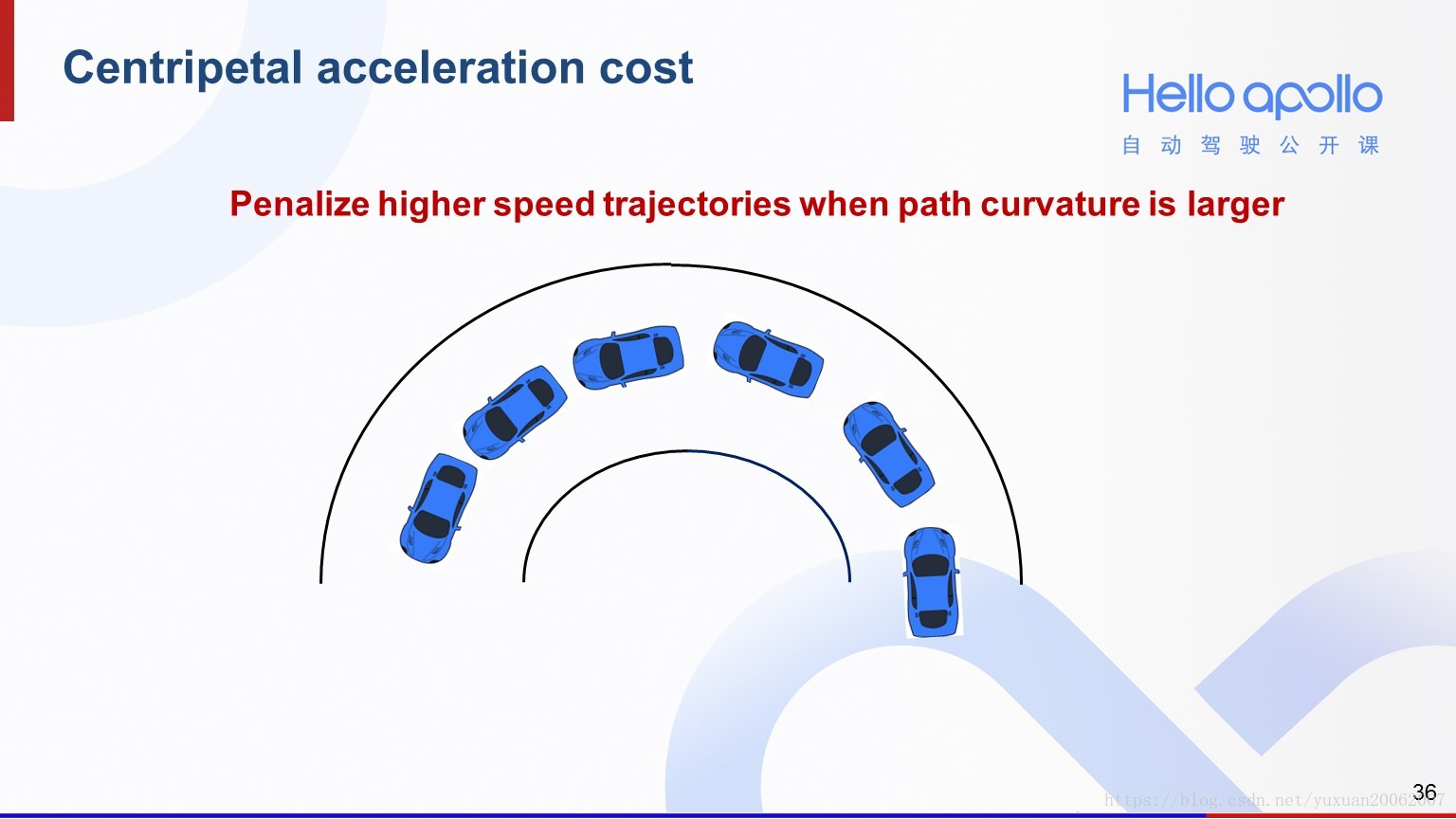
最后一个cost是向心加速度cost。设计这个cost是为了在转弯或调头的时候能够减速慢行。在弯道处,车速慢的轨迹,其向心加速度cost就会相对较低,那么就会更容易被率先挑选出来。
这六个cost的加权求和就是轨迹的总cost。开发者可以根据产品的需要,调试这六个权重。
这里介绍一下限制检测和碰撞检测。限制检测考察的内容有轨迹的加速度、加加速度、和曲率。碰撞检测则是把自动驾驶汽车的轨迹和其他障碍物的预测轨迹进行比对,观察是否有轨迹重叠。
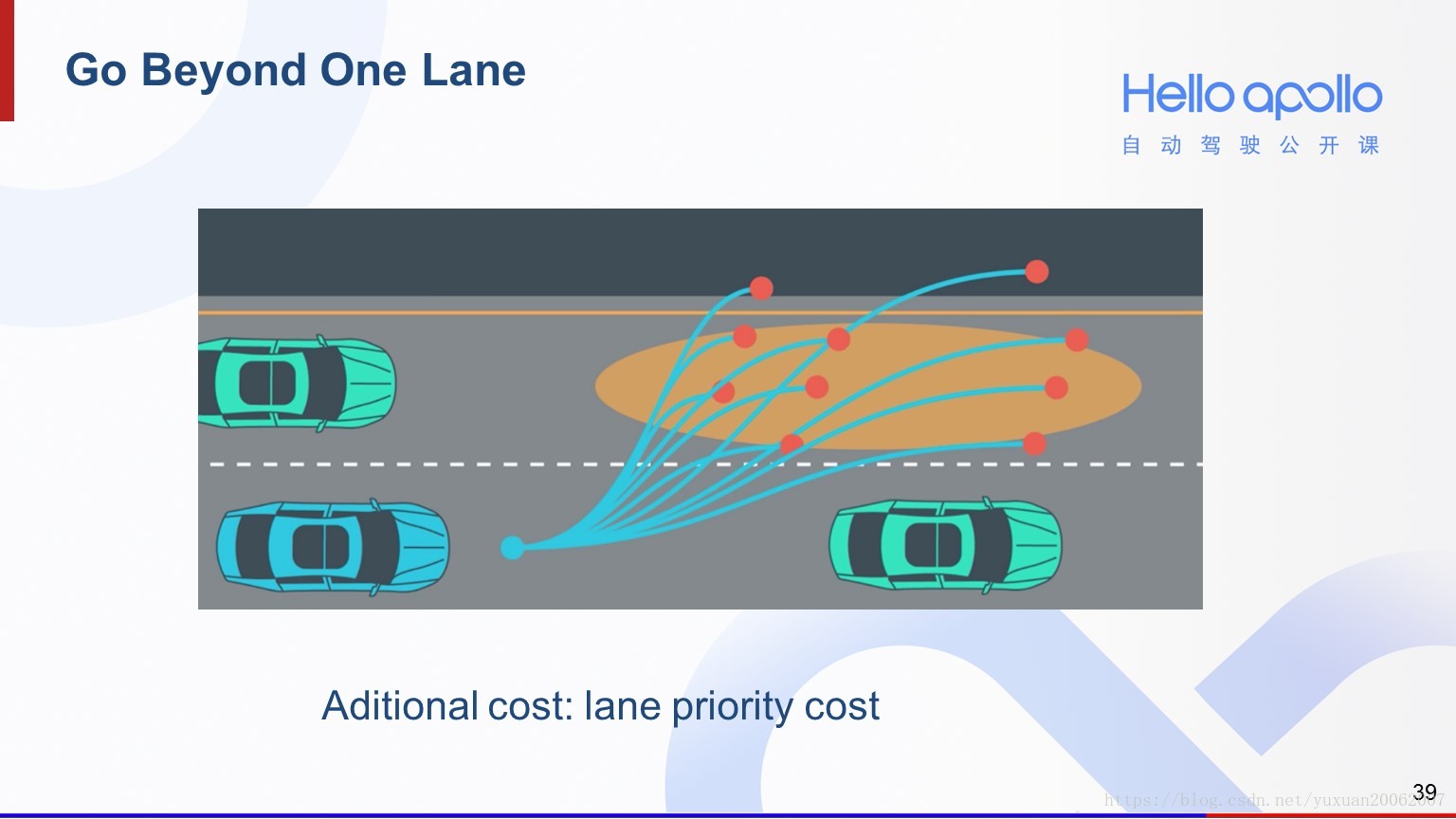
对于换道场景,Lattice算法仅仅需要对目标车道对应的参考线做一次采样+选择的流程。本车道和目标车道均能产生一条最优轨迹。给换道轨迹的cost上增加额外的车道优先级的cost,再将两条轨迹比较,选择cost较小的那条即可。
智能推荐
2014年高级计算机操作员工种代码36-323不可积分入户深圳吗,计算机操作员 (2011年深圳招调工热门工种)...-程序员宅基地
文章浏览阅读198次。好消息:计算机操作员(工种代码:46-207)被确定为2011年深圳市职业技能鉴定计算机类鉴定工种学习对象:Office2003综合应用:1、向有一定电脑基础,特别是对OFFICE办公软件有一定了解,欲从事计算机日常办公的人员进行培训.2、此科目是深圳市招调工种.图形图像处理CorelDraw X3:1、从事或有意从事工艺美术、广告艺术、图文排版、图文印刷、计算机多媒体技术工作人员以及其他需要掌握..._计算机操作员职业代码
文心一言api接入如何在你的项目里使用文心一言_文言一心api-程序员宅基地
文章浏览阅读7.5k次,点赞6次,收藏47次。基于百度文心一言语言大模型的智能文本对话AI机器人API,支持聊天对话、行业咨询、语言学习、代码编写等功能.您的AppKey和uid是重要信息,请务必妥善保存,避免泄漏!您的AppKey和uid是重要信息,请务必妥善保存,避免泄漏!您的AppKey和uid是重要信息,请务必妥善保存,避免泄漏!AppKey申请通过后,登录。请求方式: POST。_文言一心api
别再用硬编码写业务流程了,试试这款轻量级流程编排框架-程序员宅基地
文章浏览阅读488次。前言在每个公司的系统中,总有一些拥有复杂业务逻辑的系统,这些系统承载着核心业务逻辑,几乎每个需求都和这些核心业务有关,这些核心业务业务逻辑冗长,涉及内部逻辑运算,缓存操作,持久化操作,外部..._什么业务场景要用到编排工具
P1015 回文数_1、若一个5位数字从左向右读与从右向左读都一样,我们就将其称之为回文串。小申编-程序员宅基地
文章浏览阅读297次。题目描述若一个数(首位不为零)从左向右读与从右向左读都一样,我们就将其称之为回文数。例如:给定一个十进制数5656,将5656加6565(即把5656从右向左读),得到121121是一个回文数。又如:对于十进制数8787:STEP1:8787+7878=165165STEP2:165165+561561=726726STEP3:726726+627627=13531..._1、若一个5位数字从左向右读与从右向左读都一样,我们就将其称之为回文串。小申编
直线与球体的交点lisp_晓东CAD家园-论坛-A/VLISP-[LISP函数]:计算直线与曲线交点-:5 如何用Lisp程序计算支线Line与曲线(二次样条或PLINE拟合曲线)三交点,请诸位高手提...-程序员宅基地
文章浏览阅读389次。[font=courier new]86. xdrx_getinters功能:1.求两个AcDbCurve(曲线)实体的交点.2.求一个AcDbCurve(曲线)实体和一个选择集中所有AcDbCurve(曲线)的交点。3.求一个选择集中所有AcDbCurve(曲线)实体的交点.4.求一个选择集SS1中的所有AcDbCurve实体和另个选择集SS2所有AcDbCurve实体的交点。调用格式: 1. ..._lisp inters
HDU 1198 - Farm Irrigation-程序员宅基地
文章浏览阅读44次。Problem DescriptionBenny has a spacious farm land to irrigate. The farm land is a rectangle, and is divided into a lot of samll squares. Water pipes are placed in these squares. Different square has...
随便推点
Axis2/c 知识点-程序员宅基地
文章浏览阅读145次。官网文档: http://axis.apache.org/axis2/c/core/docs/axis2c_manual.html从文档中可以总结出:1. Axis2/C是一个用C语言实现的Web Service引擎。Axis2/C基于Axis2架构,支持SOAP1.1和SOAP1.2协议,并且支持RESTful风格的Web Service。基于Axis2/C的Web Service可以..._axis2/c服务端调用axis2_get_instance
企业架构方法论-程序员宅基地
文章浏览阅读3k次。目前主要的两种架构方法(准确的说是方法论),具体的方法也是有的,也有可实际操作层面的东西,那要看很多的各个细分专业层面的东西。比如画流程图,业务流程图、数据流程图、系统交互流程图等等。togafzachmanzachman业务建模分析框架,相比于togaf,直观上直接提供了可操作的东西,可能大家更容易接受一些。这里推荐一个架构设计的专业工具,是免费的,即ArchMateArchi – Open Source ArchiMate Modelling (archim..._企业架构方法论
堆栈与队列的方法区分、优先队列的应用_判断是栈还是队列还是优先队列-程序员宅基地
文章浏览阅读123次。堆栈与队列具体的方法区分_判断是栈还是队列还是优先队列
上海计算机学会2021年7月月赛C++丙组T1布置会场-程序员宅基地
文章浏览阅读352次,点赞8次,收藏8次。小爱老师可以购买两份双拼花束后,将他重新组合成一束百合花+一束郁金香。已知布置会场需要用到x束百合花与y束郁金香,请问小爱老师购买花朵最少花费需多少元?输出共一行,一个正整数,表示小爱老师购买花朵最少花费需多少元。直接购买8束百合+6束郁金香,共计8*8+6*10=124元。内存限制: 256 Mb时间限制: 1000 ms。先购买12束双拼花朵,花费12*8=96元,第一行:两个正整数表示需要的花束数量x,y。第二行:三个正整数表示花束费用a,b,c。再购买2束百合花,花费2*8=16元,
python实现ping某一ip_使用Python测试Ping主机IP和某端口是否开放的实例-程序员宅基地
文章浏览阅读518次。使用Python方法比用各种命令方便,可以设置超时时间,到底通不通,端口是否开放一眼能看出来。命令和返回完整权限,可以ping通,端口开放,结果如下:无root权限(省略了ping),端口开放,结果如下:完整权限,可以ping通,远端端口关闭,结果如下:完整权限,可以ping通,本地端口关闭,结果如下:完整权限,不能ping通(端口自然也无法访问),结果如下:pnp.py代码#!/usr/bin/..._python ping ip无管理员权限
zplane函数怎么用m文件调用_matlab中cla用法-程序员宅基地
文章浏览阅读738次。零极点与系统稳定性的关系 4.状态方程含义 5.使用 zplane 函数 [实验原理] 该实验用 MATLAB 中库函数,如 tf2zp(b,a),ss2zp(A,B,C,D),zplane(z,p),......MATLAB 中相关命令 aa abs 绝对值、模、字符的 ascii 码值 a...零极点与系统稳定性的关系 4.状态方程含义 5.使用 zplane 函数 [实验原理] 该实验用 M..._matlabcla。m文件