【正点原子Linux连载】第十九章 设备树下的platform驱动编写 摘自【正点原子】ATK-DLRK3568嵌入式Linux驱动开发指南_正点原子的platform cable usb驱动下载-程序员宅基地
1)实验平台:正点原子ATK-DLRK3568开发板
2)平台购买地址:https://detail.tmall.com/item.htm?id=731866264428
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban
第十九章 设备树下的platform驱动编写
上一章我们详细的讲解了Linux下的驱动分离与分层,以及总线、设备和驱动这样的驱动框架。基于总线、设备和驱动这样的驱动框架,Linux内核提出来platform这个虚拟总线,相应的也有platform设备和platform驱动。上一章我们讲解了传统的、未采用设备树的platform设备和驱动编写方法。最新的Linux内核已经支持了设备树,因此在设备树下如何编写platform驱动就显得尤为重要,本章我们就来学习一下如何在设备树下编写platform驱动。
19.1 设备树下的platform驱动简介
platform驱动框架分为总线、设备和驱动,其中总线不需要我们这些驱动程序员去管理,这个是Linux内核提供的,我们在编写驱动的时候只要关注于设备和驱动的具体实现即可。在没有设备树的Linux内核下,我们需要分别编写并注册platform_device和platform_driver,分别代表设备和驱动。在使用设备树的时候,设备的描述被放到了设备树中,因此platform_device就不需要我们去编写了,我们只需要实现platform_driver即可。
19.1.1 创建设备的pinctrl节点
在platform驱动框架下必须使用pinctrl来配置引脚复用功能。我们以本章实验需要用到的LED0为例,编写LED0引脚的 pinctrl配置。打开rk3568-pinctrl.dtsi文件,RK3568的所有引脚pinctrl配置都是在这个文件里面完成的,在pinctrl节点下添加如下所示内容:
示例代码19.1.1.1 GPIO的pinctrl配置
1 led-gpios{
2 /omit-if-no-ref/
3 led_gpio: led-pin {
4 rockchip,pins =
5 <0 RK_PC0 RK_FUNC_GPIO &pcfg_pull_none>;
6 };
7 };
示例代码19.1.1.1中的第3行的led_gpio节点就是LED的pinctrl配置,把GPIO0_C0端口复用为GPIO功能。
19.1.2 在设备树中创建设备节点
接下来要在设备树中创建设备节点来描述设备信息,重点是要设置好compatible属性的值,因为platform总线需要通过设备节点的compatible属性值来匹配驱动!这点要切记。修改10.4.2小节中我们创建的gpioled节点,修改以后的内容如下:
示例代码19.1.2.1 gpioled设备节点
1 gpioled {
2 compatible = "alientek,led";
3 pinctrl-names = "alientek,led";
4 pinctrl-0 = <&led_gpio>;
5 led-gpio = <&gpio0 RK_PC0 GPIO_ACTIVE_HIGH>;
6 status = "okay";
7 };
第2行的compatible属性值为“alientek,led”,因此一会在编写platform驱动的时候of_match_table属性表中要有“alientek,led”。
第4行里,pinctrl-0属性设置LED的PIN对应的pinctrl节点,也就是我们在示例代码19.1.1.1中编写的led_gpio。
19.1.3 编写platform驱动的时候要注意兼容属性
上一章已经详细的讲解过了,在使用设备树的时候platform驱动会通过of_match_table来保存兼容性值,也就是表明此驱动兼容哪些设备。所以,of_match_table将会尤为重要,比如本例程的platform驱动中platform_driver就可以按照如下所示设置:
示例代码19.1.3.1 of_match_table匹配表的设置
1 static const struct of_device_id led_of_match[] = {
2 {
.compatible = "alientek,led" }, /* 兼容属性 */
3 {
/* Sentinel */ }
4 };
5
6 MODULE_DEVICE_TABLE(of, led_of_match);
7
8 static struct platform_driver led_platform_driver = {
9 .driver = {
10 .name = "rk3568-led",
11 .of_match_table = led_of_match,
12 },
13 .probe = led_probe,
14 .remove = led_remove,
15 };
第1~4行,of_device_id表,也就是驱动的兼容表,是一个数组,每个数组元素为of_device_id类型。每个数组元素都是一个兼容属性,表示兼容的设备,一个驱动可以跟多个设备匹配。这里我们仅仅匹配了一个设备,那就是示例代码19.1.2中创建的gpioled这个设备。第2行的compatible值为“alientek,led”,驱动中的compatible属性和设备中的compatible属性相匹配,因此驱动中对应的probe函数就会执行。注意第3行是一个空元素,在编写of_device_id的时候最后一个元素一定要为空!
第6行,通过MODULE_DEVICE_TABLE声明一下led_of_match这个设备匹配表。
第11行,设置platform_driver中的of_match_table匹配表为上面创建的leds_of_match,至此我们就设置好了platform驱动的匹配表了。
最后就是编写驱动程序,基于设备树的platform驱动和上一章无设备树的platform驱动基本一样,都是当驱动和设备匹配成功以后先根据设备树里的pinctrl属性设置PIN的电气特性再去执行probe函数。我们需要在probe函数里面执行字符设备驱动那一套,当注销驱动模块的时候remove函数就会执行,都是大同小异的。
19.2 检查引脚复用配置
19.2.1 检查引脚pinctrl配置
RK3568的一个引脚可以复用为多种功能,比如GPIO0_C0这个IO就可以用作:GPIO,PWM1_M0,GPU_AVS和UART0_RX这四个功能。我们在学习STM32单片机开发的时候,一个IO可以被多个外设使用,比如GPIO0_C0同时作为PWM1_M0、UART0_RX,但是同一时刻只能用做一个功能,做PWM1_M0的时候就不能做UART0_RX!在嵌入式Linux下,我们要严格按照一个引脚对应一个功能来设计硬件,比如GPIO0_C0现在要用作GPIO来驱动LED灯,那么就不能将GPIO0_C0作为其他功能。
正点原子RK3568开发板上将GPIO0_C0连接到了LED0上,也就是将其用作普通的GPIO,对应的pinctrl配置就是示例代码19.1.1.1。但是rk3568-pinctrl.dtsi是瑞芯微根据自己官方开发板编写的,因此GPIO0_C0就可能被瑞芯微方用作其他功能,大家在rk3568-pinctrl.dtsi里面找到如下所示代码:
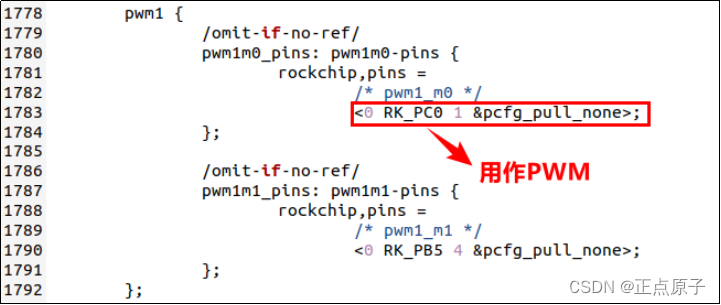
图19.2.1.1 acodec_pins节点
从图19.2.1.1可以看出,瑞芯微官方将GPIO0_C0复用为ACODEC,前面说了,一个IO只能复用为一个功能,所以如果pwm1使能的话,我们就不能再将GPIO0_C0复用为GPIO了。
同样的,继续在rk3568-pinctrl.dtsi文件里面查找,会发现如图19.2.1.2所示的地方也将GPIO0_C0复用为了uart0的rx功能:
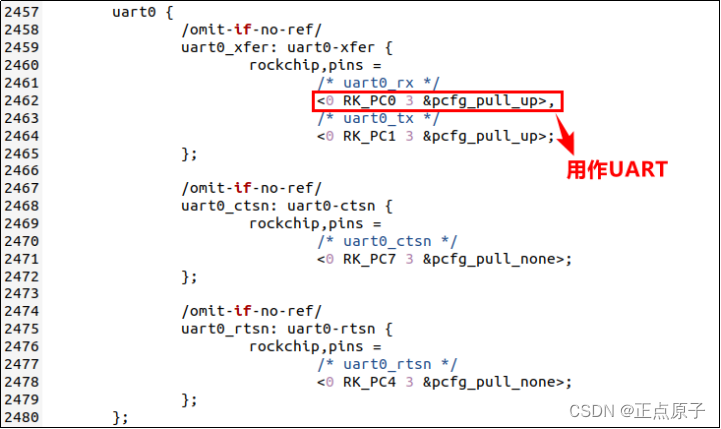
图19.2.1.2 i2s0m0_lrck_rx节点
图19.2.1.2中的uart0-xfer节点也将GPIO0_C0复用为uart0_rx,大家继续在rk3568-pinctrl.dtsi文件中搜索,还会找到GPIO0_C0的其他复用功能。
19.2.2 检查GPIO占用
上一小节只是检查了一下,GPIO0_C0这个引脚有没有被复用为多个设备,本节我们将GPIO0_C0复用为GPIO。因为我们是在瑞芯微官方提供的设备树上修改的,因此还要检查一下当GPIO0_C0作为GPIO的时候,瑞芯微官方有没有将这个GPIO分配给其他设备。其实对于GPIO0_C0这个引脚来说不会的,因为瑞芯微官方没有将其复用为GPIO,所以也就不存在说将其在作为GPIO分配给其他设备。但是我们在实际开发中要考虑到这一点,说不定其他的引脚就会被分配给某个设备做GPIO,而我们没有检查,导致两个设备都用这一个GPIO,那么肯定有一个因为申请不到GPIO而导致驱动无法工作。
所以当我们将一个引脚用作GPIO的时候,一定要检查一下当前设备树里面是否有其他设备也使用到了这个GPIO,保证设备树中只有一个设备树在使用这个GPIO。
19.3 硬件原理图分析
本实验的硬件原理参考6.2小节即可。
19.4 实验程序编写
本实验对应的例程路径为:开发板光盘01、程序源码Linux驱动例程17_dtsplatform。
本章实验我们编写基于设备树的platform驱动,所以需要在设备树中添加设备节点,然后我们只需要编写platform驱动即可。
19.4.1 修改设备树文件
首先修改设备树文件,加上我们需要的设备信息,本章我们就使用到一个LED0。需要创建LED0引脚的pinctrl节点,这个直接使用示例代码19.1.1.1中的led_gpio节点。另外也要创建一个LED0设备节点,这个直接使用示例代码19.1.2.1中的 gpioled设备节点。
19.4.2 platform驱动程序编写
设备已经准备好了,接下来就要编写相应的platform驱动了,新建名为“17_dtsplatform”的文件夹,然后在17_dtsplatform文件夹里面创建vscode工程,工作区命名为“dtsplatform”。新建名为leddriver.c的驱动文件,在leddriver.c中输入如下所示内容:
示例代码19.4.2.1 leddriver.c文件代码段
1 #include <linux/types.h>
2 #include <linux/kernel.h>
3 #include <linux/delay.h>
4 #include <linux/ide.h>
5 #include <linux/init.h>
6 #include <linux/module.h>
7 #include <linux/errno.h>
8 #include <linux/gpio.h>
9 #include <linux/cdev.h>
10 #include <linux/device.h>
11 #include <linux/of_gpio.h>
12 #include <linux/semaphore.h>
13 #include <linux/timer.h>
14 #include <linux/irq.h>
15 #include <linux/wait.h>
16 #include <linux/poll.h>
17 #include <linux/fs.h>
18 #include <linux/fcntl.h>
19 #include <linux/platform_device.h>
20 //#include <asm/mach/map.h>
21 #include <asm/uaccess.h>
22 #include <asm/io.h>
23
24
25 #define LEDDEV_CNT 1 /* 设备号长度 */
26 #define LEDDEV_NAME "dtsplatled" /* 设备名字 */
27 #define LEDOFF 0
28 #define LEDON 1
29
30 /* leddev设备结构体 */
31 struct leddev_dev{
32 dev_t devid; /* 设备号 */
33 struct cdev cdev; /* cdev */
34 struct class *class; /* 类 */
35 struct device *device; /* 设备 */
36 struct device_node *node; /* LED设备节点 */
37 int gpio_led; /* LED灯GPIO标号 */
38 };
39
40 struct leddev_dev leddev; /* led设备 */
41
42 /*
43 * @description : LED打开/关闭
44 * @param - sta : LEDON(0) 打开LED,LEDOFF(1) 关闭LED
45 * @return : 无
46 */
47 void led_switch(u8 sta)
48 {
49 if (sta == LEDON )
50 gpio_set_value(leddev.gpio_led, 1);
51 else if (sta == LEDOFF)
52 gpio_set_value(leddev.gpio_led, 0);
53 }
54
55 static int led_gpio_init(struct device_node *nd)
56 {
57 int ret;
58
59 /* 从设备树中获取GPIO */
60 leddev.gpio_led = of_get_named_gpio(nd, "led-gpio", 0);
61 if(!gpio_is_valid(leddev.gpio_led)) {
62 printk(KERN_ERR "leddev: Failed to get led-gpio\n");
63 return -EINVAL;
64 }
65
66 /* 申请使用GPIO */
67 ret = gpio_request(leddev.gpio_led, "LED");
68 if (ret) {
69 printk(KERN_ERR "led: Failed to request led-gpio\n");
70 return ret;
71 }
72
73 /* 将GPIO设置为输出模式并设置GPIO初始电平状态 */
74 gpio_direction_output(leddev.gpio_led,0);
75
76 return 0;
77 }
78
79 /*
80 * @description : 打开设备
81 * @param – inode : 传递给驱动的inode
82 * @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
83 * 一般在open的时候将private_data指向设备结构体。
84 * @return : 0 成功;其他 失败
85 */
86 static int led_open(struct inode *inode, struct file *filp)
87 {
88 return 0;
89 }
90
91 /*
92 * @description : 向设备写数据
93 * @param - filp : 设备文件,表示打开的文件描述符
94 * @param - buf : 要写给设备写入的数据
95 * @param - cnt : 要写入的数据长度
96 * @param - offt : 相对于文件首地址的偏移
97 * @return : 写入的字节数,如果为负值,表示写入失败
98 */
99 static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
100 {
101 int retvalue;
102 unsigned char databuf[1];
103 unsigned char ledstat;
104
105 retvalue = copy_from_user(databuf, buf, cnt);
106 if(retvalue < 0) {
107 printk("kernel write failed!\r\n");
108 return -EFAULT;
109 }
110
111 ledstat = databuf[0];
112 if (ledstat == LEDON) {
113 led_switch(LEDON);
114 } else if (ledstat == LEDOFF) {
115 led_switch(LEDOFF);
116 }
117 return 0;
118 }
119
120 /* 设备操作函数 */
121 static struct file_operations led_fops = {
122 .owner = THIS_MODULE,
123 .open = led_open,
124 .write = led_write,
125 };
126
127 /*
128 * @description : flatform驱动的probe函数,当驱动与
129 * 设备匹配以后此函数就会执行
130 * @param - dev : platform设备
131 * @return : 0,成功;其他负值,失败
132 */
133 static int led_probe(struct platform_device *pdev)
134 {
135 int ret;
136
137 printk("led driver and device was matched!\r\n");
138
139 /* 初始化 LED */
140 ret = led_gpio_init(pdev->dev.of_node);
141 if(ret < 0)
142 return ret;
143
144 /* 1、设置设备号 */
145 ret = alloc_chrdev_region(&leddev.devid, 0, LEDDEV_CNT,
LEDDEV_NAME);
146 if(ret < 0) {
147 pr_err("%s Couldn't alloc_chrdev_region, ret=%d\r\n",
LEDDEV_NAME, ret);
148 goto free_gpio;
149 }
150
151 /* 2、初始化cdev */
152 leddev.cdev.owner = THIS_MODULE;
153 cdev_init(&leddev.cdev, &led_fops);
154
155 /* 3、添加一个cdev */
156 ret = cdev_add(&leddev.cdev, leddev.devid, LEDDEV_CNT);
157 if(ret < 0)
158 goto del_unregister;
159
160 /* 4、创建类 */
161 leddev.class = class_create(THIS_MODULE, LEDDEV_NAME);
162 if (IS_ERR(leddev.class)) {
163 goto del_cdev;
164 }
165
166 /* 5、创建设备 */
167 leddev.device = device_create(leddev.class, NULL, leddev.devid,
NULL, LEDDEV_NAME);
168 if (IS_ERR(leddev.device)) {
169 goto destroy_class;
170 }
171
172 return 0;
173 destroy_class:
174 class_destroy(leddev.class);
175 del_cdev:
176 cdev_del(&leddev.cdev);
177 del_unregister:
178 unregister_chrdev_region(leddev.devid, LEDDEV_CNT);
179 free_gpio:
180 gpio_free(leddev.gpio_led);
181 return -EIO;
182 }
183
184 /*
185 * @description : platform驱动的remove函数
186 * @param - dev : platform设备
187 * @return : 0,成功;其他负值,失败
188 */
189 static int led_remove(struct platform_device *dev)
190 {
191 gpio_set_value(leddev.gpio_led, 0);/* 卸载驱动的时候关闭LED */
192 gpio_free(leddev.gpio_led); /* 注销GPIO */
193 cdev_del(&leddev.cdev); /* 删除cdev */
194 unregister_chrdev_region(leddev.devid, LEDDEV_CNT);
195 device_destroy(leddev.class, leddev.devid); /* 注销设备 */
196 class_destroy(leddev.class); /* 注销类 */
197 return 0;
198 }
199
200 /* 匹配列表 */
201 static const struct of_device_id led_of_match[] = {
202 {
.compatible = "alientek,led" },
203 {
/* Sentinel */ }
204 };
205
206 MODULE_DEVICE_TABLE(of, led_of_match);
207
208 /* platform驱动结构体 */
209 static struct platform_driver led_driver = {
210 .driver = {
211 .name = "rk3568-led", /* 驱动名字,用于和设备匹配 */
212 .of_match_table = led_of_match, /* 设备树匹配表 */
213 },
214 .probe = led_probe,
215 .remove = led_remove,
216 };
217
218 /*
219 * @description : 驱动模块加载函数
220 * @param : 无
221 * @return : 无
222 */
223 static int __init leddriver_init(void)
224 {
225 return platform_driver_register(&led_driver);
226 }
227
228 /*
229 * @description : 驱动模块卸载函数
230 * @param : 无
231 * @return : 无
232 */
233 static void __exit leddriver_exit(void)
234 {
235 platform_driver_unregister(&led_driver);
236 }
237
238 module_init(leddriver_init);
239 module_exit(leddriver_exit);
240 MODULE_LICENSE("GPL");
241 MODULE_AUTHOR("ALIENTEK");
242 MODULE_INFO(intree, "Y");
代码中以前讲过的知识点这里就不再重述了!
第55~77行,自定义函数led_gpio_init,该函数的参数是struct device_node类型的指针,也就是led对应的设备节点,当调用函数的时候传递进来。
第133~182行,platform下的 probe函数:led_probe,当设备树中的设备节点与驱动之间匹配成功会先去初始化pinctrl里面配置的IO,也就是根据示例代码19.1.1.1中的属性进行配置,然后再执行probe函数,第140行调用led_gpio_init函数时,将pdev->dev.of_node作为参数传递到函数中,platform_device结构体中内置了一个device结构体类型的成员变量dev。在device结构体中定义了一个device_node类型的指针变量of_node,使用设备树的情况下,当匹配成功之后,of_node会指向设备树中定义的节点,所以在这里我们不需要通过调用of_find_node_by_path(“/gpioled”)函数得到led的节点。我们原来在驱动加载函数里面做的工作现在全部放到probe函数里面完成。
第189~198行,platform下的remove函数:led_remove,当platform驱动模块被卸载时此函数就会执行。在此函数里面释放内存、注销字符设备等,也就是将原来驱动卸载函数里面的工作全部都放到remove函数中完成。
第201~204行,匹配表,描述了此驱动都和什么样的设备匹配,第202行添加了一条值为"alientek,led"的compatible属性值,当设备树中某个设备节点的compatible属性值也为“alientek,led”的时候就会与此驱动匹配。
第209~216行,platform_driver驱动结构体变量led_driver,211行设置这个platform驱动的名字为“rk3568-led”,因此,当驱动加载成功以后就会在/sys/bus/platform/drivers/目录下存在一个名为“rk3568-led”的文件。第212行绑定platform驱动的of_match_table表。
第223~226行,platform驱动模块入口函数,在此函数里面通过platform_driver_register向Linux内核注册一个platform驱动led_driver。
第233~236行,platform驱动驱动模块出口函数,在此函数里面通过platform_driver_unregister从Linux内核卸载一个platform驱动led_driver。
19.4.3 编写测试APP
测试APP就直接使用上一章18.4.2小节编写的ledApp.c即可。
19.5 运行测试
19.5.1 编译驱动程序和测试APP
1、编译驱动程序
编写Makefile文件,本章实验的Makefile文件和第五章实验基本一样,只是将obj-m变量的值改为“leddriver.o”,Makefile内容如下所示:
示例代码19.5.1.1 Makefile文件
1 KERNELDIR := /home/alientek/rk3568_linux_sdk/kernel
......
4 obj-m := leddriver.o
......
11 clean:
12 $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
第4行,设置obj-m变量的值为“leddriver.o”。
输入如下命令编译出驱动模块文件:
make ARCH=arm64 //ARCH=arm64必须指定,否则编译会失败
编译成功以后就会生成一个名为“leddriver.o”的驱动模块文件。
2、编译测试APP
测试APP直接使用上一章的ledApp这个测试软件即可。
19.5.2 运行测试
在Ubuntu中将上一小节编译出来的leddriver.ko通过adb命令发送到开发板的/lib/modules/4.19.232目录下,命令如下:
adb push leddriver.ko /lib/modules/4.19.232
发送成功以后进入到开发板目录lib/modules/4.19.232中,输入如下命令加载leddriver.ko这个驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe leddriver //加载驱动模块
驱动模块加载完成以后到/sys/bus/platform/drivers/目录下查看驱动是否存在,我们在leddriver.c中设置name字段为“rk3568-led”,因此会在/sys/bus/platform/drivers/目录下存在名为“rk3568-led”这个文件,结果如图19.5.2.1所示:
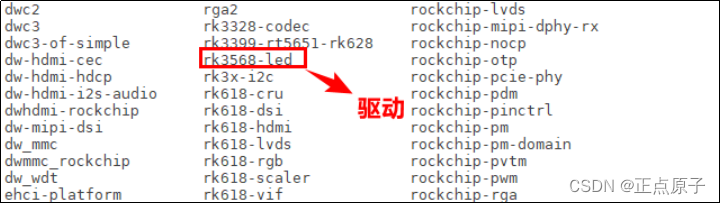
图19.5.2.1 rk3568-led驱动
同理,在/sys/bus/platform/devices/目录下也存在led的设备文件,也就是设备树中gpioled这个节点,如图19.5.2.2所示:
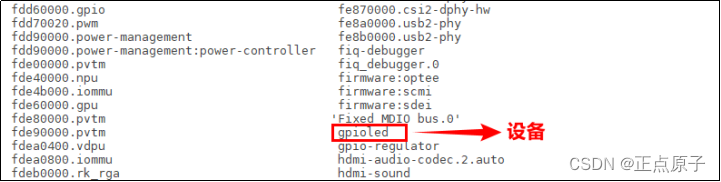
图19.5.2.2 gpioled设备
驱动和模块都存在,当驱动和设备匹配成功以后就会输出如图19.5.2.3所示一行语句:

图19.5.2.3 驱动和设备匹配成功
驱动和设备匹配成功以后就可以测试LED灯驱动了,输入如下命令打开LED灯:
./ledApp /dev/dtsplatled 1 //打开LED灯
在输入如下命令关闭LED灯:
./ledApp /dev/dtsplatled 0 //关闭LED灯
观察一下LED灯能否打开和关闭,如果可以的话就说明驱动工作正常,如果要卸载驱动的话输入如下命令即可:
rmmod leddriver.ko
智能推荐
Spring Boot 获取 bean 的 3 种方式!还有谁不会?,Java面试官_springboot2.7获取bean-程序员宅基地
文章浏览阅读1.2k次,点赞35次,收藏18次。AutowiredPostConstruct 注释用于在依赖关系注入完成之后需要执行的方法上,以执行任何初始化。此方法必须在将类放入服务之前调用。支持依赖关系注入的所有类都必须支持此注释。即使类没有请求注入任何资源,用 PostConstruct 注释的方法也必须被调用。只有一个方法可以用此注释进行注释。_springboot2.7获取bean
Logistic Regression Java程序_logisticregression java-程序员宅基地
文章浏览阅读2.1k次。理论介绍 节点定义package logistic;public class Instance { public int label; public double[] x; public Instance(){} public Instance(int label,double[] x){ this.label = label; th_logisticregression java
linux文件误删除该如何恢复?,2024年最新Linux运维开发知识点-程序员宅基地
文章浏览阅读981次,点赞21次,收藏18次。本书是获得了很多读者好评的Linux经典畅销书**《Linux从入门到精通》的第2版**。下面我们来进行文件的恢复,执行下文中的lsof命令,在其返回结果中我们可以看到test-recovery.txt (deleted)被删除了,但是其存在一个进程tail使用它,tail进程的进程编号是1535。我们看到文件名为3的文件,就是我们刚刚“误删除”的文件,所以我们使用下面的cp命令把它恢复回去。命令进入该进程的文件目录下,1535是tail进程的进程id,这个文件目录里包含了若干该进程正在打开使用的文件。
流媒体协议之RTMP详解-程序员宅基地
文章浏览阅读10w+次,点赞12次,收藏72次。RTMP(Real Time Messaging Protocol)实时消息传输协议是Adobe公司提出得一种媒体流传输协议,其提供了一个双向得通道消息服务,意图在通信端之间传递带有时间信息得视频、音频和数据消息流,其通过对不同类型得消息分配不同得优先级,进而在网传能力限制下确定各种消息得传输次序。_rtmp
微型计算机2017年12月下,2017年12月计算机一级MSOffice考试习题(二)-程序员宅基地
文章浏览阅读64次。2017年12月的计算机等级考试将要来临!出国留学网为考生们整理了2017年12月计算机一级MSOffice考试习题,希望能帮到大家,想了解更多计算机等级考试消息,请关注我们,我们会第一时间更新。2017年12月计算机一级MSOffice考试习题(二)一、单选题1). 计算机最主要的工作特点是( )。A.存储程序与自动控制B.高速度与高精度C.可靠性与可用性D.有记忆能力正确答案:A答案解析:计算...
20210415web渗透学习之Mysqludf提权(二)(胃肠炎住院期间转)_the provided input file '/usr/share/metasploit-fra-程序员宅基地
文章浏览阅读356次。在学MYSQL的时候刚刚好看到了这个提权,很久之前用过别人现成的,但是一直时间没去细想, 这次就自己复现学习下。 0x00 UDF 什么是UDF? UDF (user defined function),即用户自定义函数。是通过添加新函数,对MySQL的功能进行扩充,就像使..._the provided input file '/usr/share/metasploit-framework/data/exploits/mysql
随便推点
webService详细-程序员宅基地
文章浏览阅读3.1w次,点赞71次,收藏485次。webService一 WebService概述1.1 WebService是什么WebService是一种跨编程语言和跨操作系统平台的远程调用技术。Web service是一个平台独立的,低耦合的,自包含的、基于可编程的web的应用程序,可使用开放的XML(标准通用标记语言下的一个子集)标准...
Retrofit(2.0)入门小错误 -- Could not locate ResponseBody xxx Tried: * retrofit.BuiltInConverters_已添加addconverterfactory 但是 could not locate respons-程序员宅基地
文章浏览阅读1w次。前言照例给出官网:Retrofit官网其实大家学习的时候,完全可以按照官网Introduction,自己写一个例子来运行。但是百密一疏,官网可能忘记添加了一句非常重要的话,导致你可能出现如下错误:Could not locate ResponseBody converter错误信息:Caused by: java.lang.IllegalArgumentException: Could not l_已添加addconverterfactory 但是 could not locate responsebody converter
一套键鼠控制Windows+Linux——Synergy在Windows10和Ubuntu18.04共控的实践_linux 18.04 synergy-程序员宅基地
文章浏览阅读1k次。一套键鼠控制Windows+Linux——Synergy在Windows10和Ubuntu18.04共控的实践Synergy简介准备工作(重要)Windows服务端配置Ubuntu客户端配置配置开机启动Synergy简介Synergy能够通过IP地址实现一套键鼠对多系统、多终端进行控制,免去了对不同终端操作时频繁切换键鼠的麻烦,可跨平台使用,拥有Linux、MacOS、Windows多个版本。Synergy应用分服务端和客户端,服务端即主控端,Synergy会共享连接服务端的键鼠给客户端终端使用。本文_linux 18.04 synergy
nacos集成seata1.4.0注意事项_seata1.4.0 +nacos 集成-程序员宅基地
文章浏览阅读374次。写demo的时候遇到了很多问题,记录一下。安装nacos1.4.0配置mysql数据库,新建nacos_config数据库,并根据初始化脚本新建表,使配置从数据库读取,可单机模式启动也可以集群模式启动,启动时 ./start.sh -m standaloneapplication.properties 主要是db部分配置## Copyright 1999-2018 Alibaba Group Holding Ltd.## Licensed under the Apache License,_seata1.4.0 +nacos 集成
iperf3常用_iperf客户端指定ip地址-程序员宅基地
文章浏览阅读833次。iperf使用方法详解 iperf3是一款带宽测试工具,它支持调节各种参数,比如通信协议,数据包个数,发送持续时间,测试完会报告网络带宽,丢包率和其他参数。 安装 sudo apt-get install iperf3 iPerf3常用的参数: -c :指定客户端模式。例如:iperf3 -c 192.168.1.100。这将使用客户端模式连接到IP地址为192.16..._iperf客户端指定ip地址
浮点性(float)转化为字符串类型 自定义实现和深入探讨C++内部实现方法_c++浮点数 转 字符串 精度损失最小-程序员宅基地
文章浏览阅读7.4k次。 写这个函数目的不是为了和C/C++库中的函数在性能和安全性上一比高低,只是为了给那些喜欢探讨函数内部实现的网友,提供一种从浮点性到字符串转换的一种途径。 浮点数是有精度限制的,所以即使我们在使用C/C++中的sprintf或者cout 限制,当然这个精度限制是可以修改的。比方在C++中,我们可以cout.precision(10),不过这样设置的整个输出字符长度为10,而不是特定的小数点后1_c++浮点数 转 字符串 精度损失最小