网页端接入海康摄像头画面操作指南_如何通过ivms-4200的服务直接在自己的web中播放摄像头视频-程序员宅基地
技术标签: node.js html5 vue.js javascript
一、摄像头rtsp流画面测试
首先根据相关摄像头内附的说明书对摄像头进行安装以及wifi配置或者通过网线直连,配置完成后确保摄像头画面能够在手机APP或者相关应用程序上正常播放。
然后进入海康威视官网下载并安装SADP摄像头IP搜索工具。
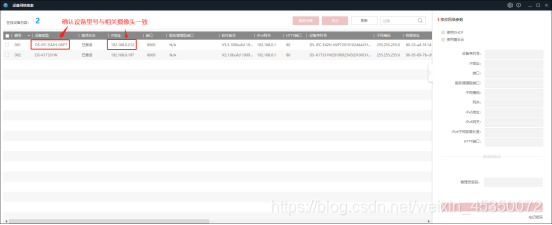
打开SADP(设备网络搜索),即能查看当前局域网下的所有海康摄像头IP地址。
下面进行摄像头rtsp流播放测试:
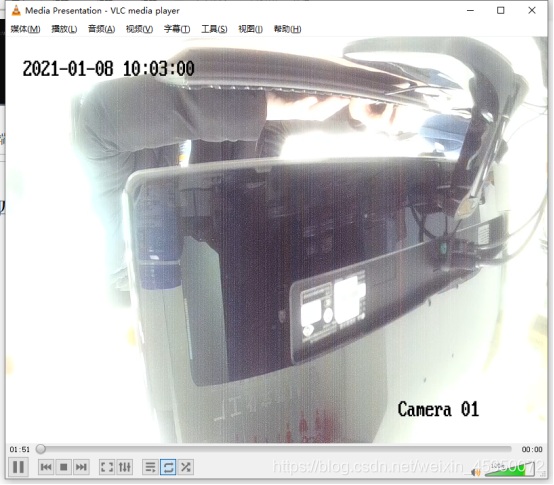
1.下载VLC media player,并安装打开。
2.打开媒体 --> 网络串流 --> 网络。
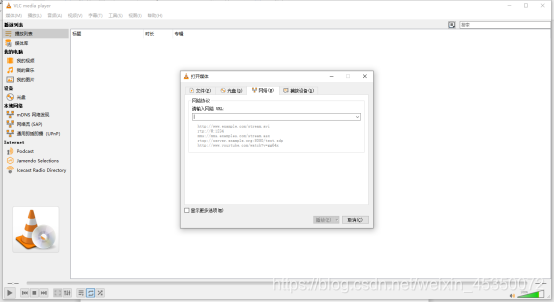
3.输入海康摄像头的rtsp地址并进行播放。海康的rtsp地址一般组成如下:rtsp://admin:{摄像头背后验证码或密码}@{摄像头IP地址}:554/h264/ch1/main/av_stream

能够正常播放后,进行下一步操作。
二、流媒体服务器搭建
要将监控画面在web端显示需要流媒体服务器的支持,当前主流的流媒体服务主要通过SRS、nginx、nodejs等搭建,下面主要介绍由node搭建的流媒体服务器。
要求电脑上有node环境,若没有请去node官网进行下载以及安装。安装完成后打开cmd输入node -v查看node版本以及检查node是否安装成功。

该流媒体服务器采用node-media-server插件,具体搭建流程如下:
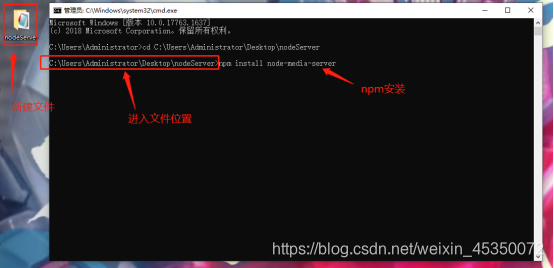
1.新建相关文件夹。
2.使用cmd并进入新建的文件夹内,输入npm install node-media-server安装相关插件。
3.安装完成后在新建的文件夹内新建一个js文件,在js文件内输入相关调用以及配置代码。
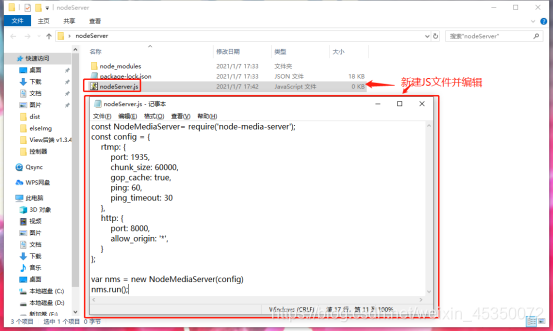
const NodeMediaServer= require('node-media-server');
const config = {
rtmp: {
port: 1935,
chunk_size: 60000,
gop_cache: true,
ping: 60,
ping_timeout: 30
},
http: {
port: 8000,
allow_origin: '*',
}
};
var nms = new NodeMediaServer(config)
nms.run();
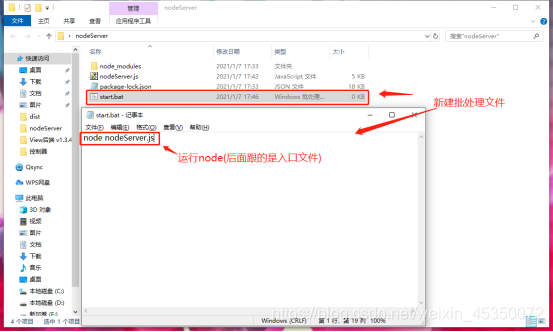
4.运行node服务。
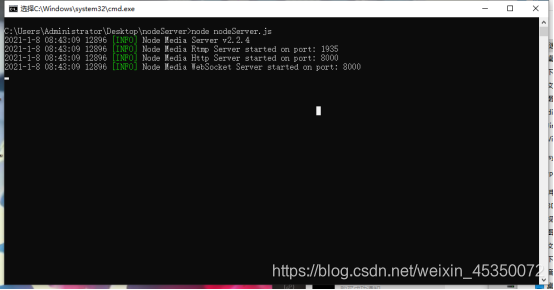
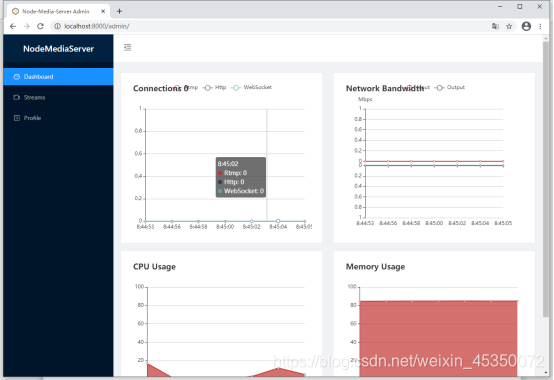
显示如上界面则表示启动完成,可以在浏览器上登录 localhost:8000/admin 查看node服务页面。
三、视频流转码以及推流
因为rtsp流无法直接在web端播放,因此通常将rtsp流转化为rtmp、httpFlv、hls等编码格式,因为rtmp依赖flash,hls流的延迟太大,因此选用httpFlv作为传输的码流格式,转码方式如下:
1.下载并安装ffmpeg。
2.配置环境变量并在cmd使用ffmpeg -h测试。
3.使用ffmpeg指令对rtsp流进行转码以及推流(下方的node端地址中的STREAM_NAME_agv_1可以随意更改表示直播的“房间”)。
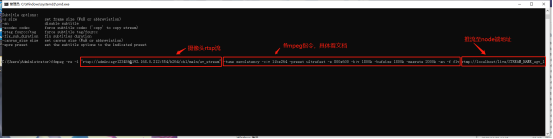
4.再次打开VLC并打开网络串流,输入httpFlv码流地址进行播放,能够正常播放即转码完成。(将上方图片的node端地址中的rtmp改为http并加入后缀.flv即http://{node服务的IP地址以及端口}/live/STREAM_NAME_agv_1.flv)。
四、网页显示
web端显示需要支持httpFlv格式的播放器,这边选用的是LivePlayer.js。根据其相关配置配置完后,即可在web端显示监控画面。

智能推荐
读《疯狂的程序员》后感-程序员宅基地
文章浏览阅读1k次。读《疯狂的程序员》后感 花了几天功夫,把《疯狂的程序员》这本书看完了,这本书,是我无意间在校图书馆看到的,出版日期是2008年的,到现在为止已经过去好几年了,作者绝影。是在csdn上连载的博客,不过不知道作者在csdn上的名字是什么,自己搜索找,竟然没找到,很遗憾。书中讲述的是作者从大学时期到工作,再到创业7年时间的精力,说实话,作者的语文功底非常不错,能够生动的刻画
可后悔贪心 -- 解题报告_e. buy low sell high-程序员宅基地
文章浏览阅读244次。感觉普通贪心是每一个维度都是平等的,没有优先级。而可后悔贪心是存在某个维度是不可变的,不能直接用排序或者堆进行维护,常常需要经过某种处理,通过挖掘出题目中关于不可变维度的特殊性质,使其可以用排序或者堆等数据结构进行贪心。可后悔贪心常用堆(priority_queue)进行维护。_e. buy low sell high
AMCL源码解析-程序员宅基地
文章浏览阅读6.5k次,点赞14次,收藏93次。AMCL是ros导航中的一个定位功能包。其实现了机器人在2D平面中基于概率方法的定位系统。该方法使用粒子滤波器来针对已知地图跟踪机器人的位姿。MCL与AMCL的区别它们最重要的区别应该是重采用过程。AMCL在采样过程中仍然会随机的增加小数量的粒子。这一步骤正式为了解决MCL不能处理的重定位问题。当粒子逐渐聚集,其它地方的粒子将慢慢消失。对于MCL来说,如果此时将机器人搬动到另一个地方。此时原来..._amcl源码
Python 批量修改图片分辨率_image.open(image_file).resize((720, 1280))-程序员宅基地
文章浏览阅读3.7k次,点赞6次,收藏30次。# 导入需要的模块from glob import globfrom PIL import Imageimport os# 图片路径# 使用 glob模块 获得文件夹内所有jpg图像img_path = glob("./*.jpg")#存储(输出)路径path_save = "./result"for i,file in enumerate(img_path): name = os.path.join(path_save, "%d.jpg"%i) im = ..._image.open(image_file).resize((720, 1280))
nmap 目标说明_nmap 扫描文件中的目标-程序员宅基地
文章浏览阅读1.9k次。1. 什么是目标说明除了 选项,所有出现在 Nmap 命令行上的命令字符串 都被视为对目标主机的说明。 最简单的目标说明是指定一个目标 IP 地址或主机名。2. 指定目标 IP 地址2.1. 普通格式 IP 地址指定普通的 IP 地址很简单,比如在 nmap 命令中跟随这样 192.168.0.1 格式的 IP 地址即可,这样每次只能指定一个 IP 地址。但是这样指定一个 IP 地址也有它的不足或是不够灵活的地方,比如需要同时扫描多个 IP地址,而且这几个 IP 地址的主机号是连续的也就是这几_nmap 扫描文件中的目标
.Net程序员如何快速成长之我见(转)-程序员宅基地
文章浏览阅读151次。在面试一些新程序员的时候,当问他为什么选择.net方向时,经常听到一些这样的回答:记得曾经我的老师对我们说,当你在开发语言和工具方面不知道怎么选择的时候,那么你只要跟着微软走就行了.所以最终他选择了.net.我想大家都曾有过类似的经历.当经历过数年之后,一些人在.net的某方面成为了专家,有些人精通数据库方面,有些人精通web界面设计,有些人精通系统架构.还有一些人是什么都会,但不管哪..._.net程序员到新公司怎么快速熟悉一个业余
随便推点
PyQt5之QDrag拖放按钮小部件学习_pyqt qdrag-程序员宅基地
文章浏览阅读1.1k次。在下面的示例中,我们将演示如何拖放按钮小部件。from PyQt5.Qt import QPushButton, QWidget, QApplicationfrom PyQt5.QtCore import Qt, QMimeDatafrom PyQt5.QtGui import QDragimport sys#按钮类class Button(QPushButton): d..._pyqt qdrag
Matlab进阶绘图第20期—带类别标签的三维柱状图_matlab画三标签柱状图-程序员宅基地
文章浏览阅读846次。Matlab进阶绘图第20期—带类别标签的三维柱状图_matlab画三标签柱状图
THREE.js渲染顺序_threejs 多个几何体展示顺序-程序员宅基地
文章浏览阅读1.1k次。本文主要讲述了THREE.js中的不透明物体和透明物体的渲染顺序,主要涉及THREE.js的以下内容:Materialblending及blending相关的一系列属性Object3Ddepth原文:https://segmentfault.com/a/1190000041221932。_threejs 多个几何体展示顺序
SQL Server 数据库查询速度慢的原因有很多常见的有那些呢_mssql server 响应变慢了-程序员宅基地
文章浏览阅读428次,点赞9次,收藏8次。例如耽搁查询的排序、连接、扫描和GROUP BY字句同时执行,SQL SERVER根据系统的负载情况决定最优的并行等级,复杂的需要消耗大量的CPU的查询最适合并行处理。13、在查询Select语句中用Where字句限制返回的行数,避免表扫描,如果返回不必要的数据,浪费了服务器的I/O资源,加重了网络的负担降低性能。如果表很大,在表扫描的期间将表锁住,禁止其他的联接访问表,后果严重。其次,看一下SQL SERVER的数据存放的结构:一个页面的大小为8K(8060)字节,8个页面为一个盘区,按照B树存放。_mssql server 响应变慢了
Linux 学习路线图_linux学习路径-程序员宅基地
文章浏览阅读2.4w次,点赞62次,收藏559次。1.应用场景更加高效地学习并达到运用Linux 2.学习/操作 linux运维学习需要分为四个阶段:初级入门、中级进阶、高级提升、资深方向细化。 第一阶段:初级入门 初级阶段需要把linux学习路线搞清楚,任何学习都是循序渐进的,所以学linux也是需要有一定的路线。 初级入门: Linux基础知识、基本命令(起源、组成、常用命令如cp、ls、fi..._linux学习路径
量子计算与通信技术:实现无线信息传递的新方法-程序员宅基地
文章浏览阅读893次,点赞19次,收藏19次。1.背景介绍量子计算与通信技术是当今科技界最热门的研究领域之一。随着计算机科学、物理学、信息论等多个领域的发展,量子计算与通信技术已经从理论研究阶段迈出了实际应用的第一步。在这篇文章中,我们将深入探讨量子计算与通信技术的核心概念、算法原理、具体操作步骤以及数学模型公式。同时,我们还将分析其在未来发展趋势与挑战方面的展望。1.1 量子计算与通信技术的发展背景量子计算与通信技术的研究起源于..._量子计算辅助无线移动网络