做机械臂导航时遇到的问题4:如何订阅joint_states话题(输出关节状态)_airbot_play/joint_states-程序员宅基地
技术标签: joint_states 订阅话题 机械臂导航 导航 ROS 机械臂
在完成用arbotix测试机械臂后,我们想控制真实的机械臂伺服电机。由于arbotix是针对舵机的,我们要想控制伺服电机,要将ROS里机械臂的关节信息(角度、角速度、加速度、力等)发给下位机,首先就是要获取关节信息。
关于让机械臂动起来,这里参考了一些大神的博客,在这里表示感谢
让模型动起来: http://blog.csdn.net/yaked/article/details/51412781
moveit驱动: http://blog.csdn.net/xu1129005165/article/details/70037698
如何在ROS下编写自己的节点来订阅话题(C++) http://blog.csdn.net/u013453604/article/details/49102957
一、查看joint_states话题内容
在我的上一篇博客“做机械臂导航遇到的问题3:如何用arbotix接口控制机械臂”的基础上,
1、我们用 $ rostopic list 查看话题列表
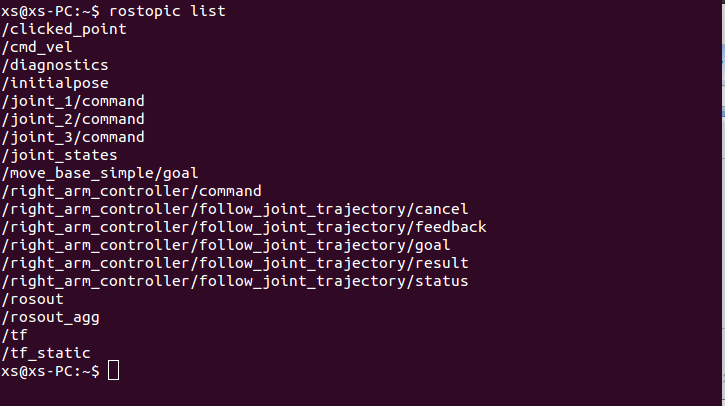
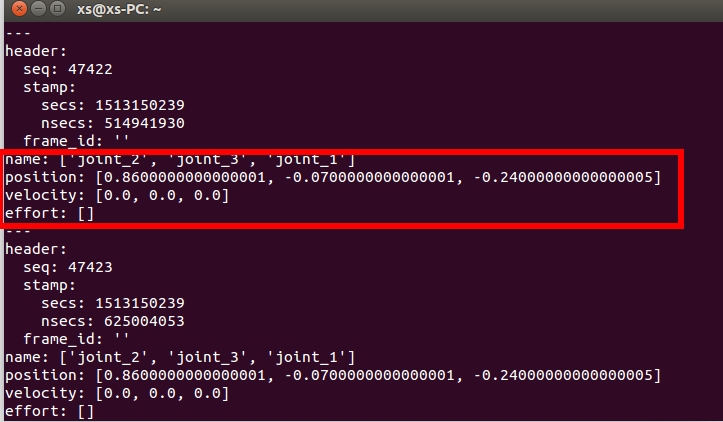
2、查看joint_states话题的详细信息 $ rostopic echo /joint_states
可以看到joint_states话题里包含我们需要的关节信息
二、编写节点,订阅joint_states话题
此部分参考http://wiki.ros.org/cn/ROS/Tutorials中的教程中3、
1、建立一个包
$ cd ~/catkin_ws/src
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
2、编写订阅器节点(参考http://wiki.ros.org/cn/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29)
在 beginner_tutorials目录下创建 src/listener.cpp 文件,并粘贴如下代码:
(我们对wiki中代码作了一些修改,添加了#include "sensor_msgs/JointState.h",定义了回调函数jointstatesCallback,监听/joint_states话题发布的消息,修改话题发布的消息类型:const sensor_msgs::JointStateConstPtr& msg,获取position、velocity中的数据,并显示出来)
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "sensor_msgs/JointState.h"
/**
* This tutorial demonstrates simple receipt of messages over the ROS system.
*/
void jointstatesCallback(const sensor_msgs::JointStateConstPtr& msg)
{
float pos[3],vel[3];
// pos=msg.position;
pos[0]=msg->position[0];
pos[1]=msg->position[1];
pos[2]=msg->position[2];
vel[0]=msg->velocity[0];
vel[1]=msg->velocity[1];
vel[2]=msg->velocity[2];
ROS_INFO("I heard: [%f] [%f] [%f] [%f] [%f] [%f]",pos[0],pos[1],pos[2],vel[0],vel[1],vel[2]);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("/joint_states", 1000, jointstatesCallback);
ros::spin();
return 0;
}
3、编写CMakeList.txt文件
文件内容如下:
cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)
## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg)
## Declare ROS messages and services
#add_message_files(FILES Num.msg)
#add_service_files(FILES AddTwoInts.srv)
## Generate added messages and services
generate_messages(DEPENDENCIES std_msgs)
## Declare a catkin package
catkin_package()
## Build talker and listener
include_directories(include ${catkin_INCLUDE_DIRS} include )
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)
add_executable(listener src/listener.cpp src/uart.c)
target_link_libraries(listener ${catkin_LIBRARIES})
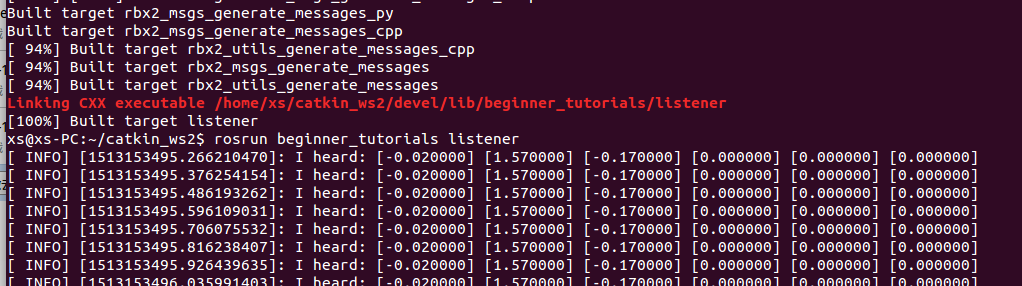
add_dependencies(listener beginner_tutorials_generate_messages_cpp)4、编译,在工作空间目录下 $ catkin_make

编译成功后,运行节点rosrun beginner_tutorials listenner,可以发现已经接收到position和velocity的数据了
智能推荐
while循环&CPU占用率高问题深入分析与解决方案_main函数使用while(1)循环cpu占用99-程序员宅基地
文章浏览阅读3.8k次,点赞9次,收藏28次。直接上一个工作中碰到的问题,另外一个系统开启多线程调用我这边的接口,然后我这边会开启多线程批量查询第三方接口并且返回给调用方。使用的是两三年前别人遗留下来的方法,放到线上后发现确实是可以正常取到结果,但是一旦调用,CPU占用就直接100%(部署环境是win server服务器)。因此查看了下相关的老代码并使用JProfiler查看发现是在某个while循环的时候有问题。具体项目代码就不贴了,类似于下面这段代码。while(flag) {//your code;}这里的flag._main函数使用while(1)循环cpu占用99
【无标题】jetbrains idea shift f6不生效_idea shift +f6快捷键不生效-程序员宅基地
文章浏览阅读347次。idea shift f6 快捷键无效_idea shift +f6快捷键不生效
node.js学习笔记之Node中的核心模块_node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是-程序员宅基地
文章浏览阅读135次。Ecmacript 中没有DOM 和 BOM核心模块Node为JavaScript提供了很多服务器级别,这些API绝大多数都被包装到了一个具名和核心模块中了,例如文件操作的 fs 核心模块 ,http服务构建的http 模块 path 路径操作模块 os 操作系统信息模块// 用来获取机器信息的var os = require('os')// 用来操作路径的var path = require('path')// 获取当前机器的 CPU 信息console.log(os.cpus._node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是
数学建模【SPSS 下载-安装、方差分析与回归分析的SPSS实现(软件概述、方差分析、回归分析)】_化工数学模型数据回归软件-程序员宅基地
文章浏览阅读10w+次,点赞435次,收藏3.4k次。SPSS 22 下载安装过程7.6 方差分析与回归分析的SPSS实现7.6.1 SPSS软件概述1 SPSS版本与安装2 SPSS界面3 SPSS特点4 SPSS数据7.6.2 SPSS与方差分析1 单因素方差分析2 双因素方差分析7.6.3 SPSS与回归分析SPSS回归分析过程牙膏价格问题的回归分析_化工数学模型数据回归软件
利用hutool实现邮件发送功能_hutool发送邮件-程序员宅基地
文章浏览阅读7.5k次。如何利用hutool工具包实现邮件发送功能呢?1、首先引入hutool依赖<dependency> <groupId>cn.hutool</groupId> <artifactId>hutool-all</artifactId> <version>5.7.19</version></dependency>2、编写邮件发送工具类package com.pc.c..._hutool发送邮件
docker安装elasticsearch,elasticsearch-head,kibana,ik分词器_docker安装kibana连接elasticsearch并且elasticsearch有密码-程序员宅基地
文章浏览阅读867次,点赞2次,收藏2次。docker安装elasticsearch,elasticsearch-head,kibana,ik分词器安装方式基本有两种,一种是pull的方式,一种是Dockerfile的方式,由于pull的方式pull下来后还需配置许多东西且不便于复用,个人比较喜欢使用Dockerfile的方式所有docker支持的镜像基本都在https://hub.docker.com/docker的官网上能找到合..._docker安装kibana连接elasticsearch并且elasticsearch有密码
随便推点
Python 攻克移动开发失败!_beeware-程序员宅基地
文章浏览阅读1.3w次,点赞57次,收藏92次。整理 | 郑丽媛出品 | CSDN(ID:CSDNnews)近年来,随着机器学习的兴起,有一门编程语言逐渐变得火热——Python。得益于其针对机器学习提供了大量开源框架和第三方模块,内置..._beeware
Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
文章浏览阅读7.9k次。//// ViewController.swift// Day_10_Timer//// Created by dongqiangfei on 2018/10/15.// Copyright 2018年 飞飞. All rights reserved.//import UIKitclass ViewController: UIViewController { ..._swift timer 暂停
元素三大等待-程序员宅基地
文章浏览阅读986次,点赞2次,收藏2次。1.硬性等待让当前线程暂停执行,应用场景:代码执行速度太快了,但是UI元素没有立马加载出来,造成两者不同步,这时候就可以让代码等待一下,再去执行找元素的动作线程休眠,强制等待 Thread.sleep(long mills)package com.example.demo;import org.junit.jupiter.api.Test;import org.openqa.selenium.By;import org.openqa.selenium.firefox.Firefox.._元素三大等待
Java软件工程师职位分析_java岗位分析-程序员宅基地
文章浏览阅读3k次,点赞4次,收藏14次。Java软件工程师职位分析_java岗位分析
Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
文章浏览阅读2k次。Java:Unreachable code的解决方法_java unreachable code
标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地
文章浏览阅读1w次。1、html中设置标签data-*的值 标题 11111 222222、点击获取当前标签的data-url的值$('dd').on('click', function() { var urlVal = $(this).data('ur_如何根据data-*属性获取对应的标签对象