linux cgroup 死循环,Linux CGroup 基础-程序员宅基地
技术标签: linux cgroup 死循环
CGroup V1
1. CGroup 概念Task: 任务,也就是进程,但这里的进程和我们通常意义上的 OS 进程有些区别,在后面会提到。
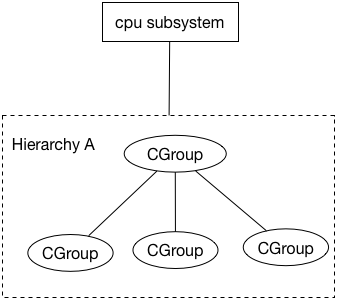
CGroup: 控制组,一个 CGroup 就是一组按照某种标准划分的Tasks。这里的标准就是 Subsystem 配置。换句话说,同一个CGroup 的 Tasks 在一个或多个 Subsystem 上使用同样的配置。
Hierarchy: 树形结构的 CGroup 层级,每个子 CGroup 节点会继承父 CGroup 节点的子系统配置,每个 Hierarchy 在初始化时会有默认的 CGroup(Root CGroup)。
Subsystem: 子系统,具体的物理资源配置,比如 CPU 使用率,内存占用,磁盘 IO 速率等。一个 Subsystem 只能附加在一个 Hierarchy 上,一个 Hierarchy 可以附加多个 Subsystem。
2. CGroup 文件系统
在具体实现中,CGroup 通过虚拟文件系统实现,一个 CGroup 就是一个文件夹,Hierarchy 层级结构通过文件夹结构实现,而每个 CGroup 的 Subsystem 配置和 Tasks 则通过文件来配置。在 Ubuntu 下,可通过lssubsys -m(需要安装cgroup-tools包),查看已有的 Subsystem:
root# lssubsys -m
cpuset /sys/fs/cgroup/cpuset
cpu,cpuacct /sys/fs/cgroup/cpu,cpuacct
blkio /sys/fs/cgroup/blkio
memory /sys/fs/cgroup/memory
devices /sys/fs/cgroup/devices
freezer /sys/fs/cgroup/freezer
net_cls,net_prio /sys/fs/cgroup/net_cls,net_prio
perf_event /sys/fs/cgroup/perf_event
hugetlb /sys/fs/cgroup/hugetlb
pids /sys/fs/cgroup/pids
这些是 Ubuntu16.04 上已实现的 Subsystem 和对应 Hierarchy。各个Subsystem 的作用可参考 RedHat CGroup Doc。在其它系统,你可以需要手动挂载虚拟文件系统并建立 Subsystem 和 Hierarchy 的关系:
root# mount -t tmpfs cgroup_root /sys/fs/cgroup
root# mkdir /sys/fs/cgroup/cpu
root# mount -t cgroup cpu -ocpu /sys/fs/cgroup/cpu
/sys/fs/cgroup/cpu 即成为附加(attach)了 CPU Subsystem 的 Hierarchy 的根目录,即 Root CGroup,我们可以在该 CGroup 下创建一个 Child CGroup:
root# mkdir /sys/fs/cgroup/cpu/demo
root# ls /sys/fs/cgroup/cpu/demo
cgroup.clone_children cgroup.procs cpuacct.stat cpuacct.usage cpuacct.usage_percpu cpu.cfs_period_us cpu.cfs_quota_us cpu.shares cpu.stat notify_on_release tasks
在创建 CGroup 时,就已经生成了一堆文件,一个 CGroup 目录中的内容大概可以分为四类:
Subsystem Conf: 如附加了 CPU Subsystem 的 CGroup 目录下的 cpu* 文件均为 CPU Subsystem 配置
Tasks: 在该 CGroup 下的 Tasks,分为两个文件,tasks 和 cgroup.procs,两者记录的都是在该进程 PID 列表,但是有所区别。
CGroup Conf: CGroup 的一些通用配置,比如 notify_on_release 用于在 CGroup 结构变更时执行 release_agent 中的命令,cgroup.clone_children 用于在 Child CGroup 创建时,自动继承父 Child CGroup 的配置,目前只有 cpuset SubSystem 支持
Child CGroups: 除以上三种文件外的子目录,如Ubuntu16.04中,每个 Root CGroup 下都有个 docker 目录,它由 Docker 创建,用于管理Docker容器的资源配置
关于 tasks 和 cgroup.procs,网上很多文章将 cgroup 的 Task 简单解释为 OS 进程,这其实不够准确,更精确地说,cgroup.procs 文件中的 PID 列表才是我们通常意义上的进程列表,而 tasks 文件中包含的 PID 实际上可以是 Linux 轻量级进程(LWP) 的 PID,而由于 Linux pthread 库的线程实际上轻量级进程实现的(Linux 内核不支持真正的线程,可通过getconf GNU_LIBPTHREAD_VERSION查看使用的 pthread 线程库版本,Ubuntu16.04上是NPTL2.23(Native Posix Thread Lib),简单来说,Linux 进程主线程 PID = 进程 PID,而其它线程的 PID (LWP PID)则是独立分配的,可通过syscall(SYS_gettid)得到。LWP 在 ps 命令中默认是被隐藏的,在/proc/目录下可以看到。为了区分方便,我们将以 Proc 来表示传统意义上的进程,以 Thread 表示 LWP 进程。
我们可以通过 ps 命令的 -T 参数将 LWP 在 SPID 列显示出来:
root# ps -ef | wc -l
218
root# ps -efT | wc -l
816
root# ps -p 28051 -lfT
F S UID PID SPID PPID C PRI NI ADDR SZ WCHAN STIME TTY TIME CMD
0 Z root 28051 28051 26889 0 80 0 - 0 exit 10:30 pts/10 00:00:00 [a.out]
1 R root 28051 28054 26889 99 80 0 - 12409 - 10:30 pts/10 00:00:10 [a.out]
1 R root 28051 28055 26889 99 80 0 - 12409 - 10:30 pts/10 00:00:10 [a.out]
以上示例中,Proc 28051 下有两个 Thread (28054,28055),即开了两个子线程。总的来说,Linux 下这种通过 LWP 来实现线程的方式,在一些时候会给用户一些困惑,比如如果我 kill -9 28055(默认在 ps 下看不到),按照 POSIX 标准,28055 “线程”所在的进程会被 Kill掉,因此28051,28054,28055三个进程都会被杀掉,感觉就很诡异。感兴趣的可以看看这篇文章)。
当要向某个 CGroup 加入 Thread 时,将Thread PID 写入 tasks 或 cgroup.procs 即可,cgroup.procs 会自动变更为该 Task 所属的 Proc PID。如果要加入 Proc 时,则只能写入到 cgroup.procs 文件(未解),tasks 文件会自动更新为该 Proc 下所有的 Thread PID。可以通过cat /proc/PID/cgroup查看某个 Proc/Thread 的 CGroup 信息,
3. 一个实例1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50#define _GNU_SOURCE /* See feature_test_macros(7) */
#include
#include
#include
#include
#include
#include
#include
const int NUM_THREADS = 5;
void *thread_main(void *threadid)
{
long tid;
tid = (long)threadid;
printf("sub thread#%ld, pid #%ld!\n", tid, syscall(SYS_gettid));
int a=0;
while(1) {
a++;
}
pthread_exit(NULL);
}
int main (int argc, char *argv[])
{
printf("main thread, pid #%ld!\n", syscall(SYS_gettid));
int num_threads;
if (argc > 1){
num_threads = atoi(argv[1]);
}
if (num_threads<=0 || num_threads>=100){
num_threads = NUM_THREADS;
}
pthread_t* threads = (pthread_t*) malloc (sizeof(pthread_t)*num_threads);
int rc;
long t;
for(t=0; t
rc = pthread_create(&threads[t], NULL, thread_main, (void *)t);
if (rc){
printf("ERROR; return code from pthread_create() is %d\n", rc);
exit(-1);
}
}
pthread_exit(NULL);
free(threads);
}
这段代码简单创建了四个死循环线程,运行:
1
2
3
4
5
6root# gcc -pthread t.c && ./a.out
main thread, pid #30354
sub thread#0, pid #30355
sub thread#2, pid #30357
sub thread#3, pid #30358
sub thread#1, pid #30356
通过 htop/top(top 默认不会显示 LWP) 看到现在四个 CPU 会被吃满,为了限制资源,我们创建一个 CGroup:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30root# mkdir /sys/fs/cgroup/cpu/wdj
# 创建 CGroup 之后,会自动生成相关文件
root# ls /sys/fs/cgroup/cpu/wdj/
cgroup.clone_children cgroup.procs cpuacct.stat cpuacct.usage cpuacct.usage_percpu cpu.cfs_period_us cpu.cfs_quota_us cpu.shares cpu.stat notify_on_release tasks
# 配置该 CGroup,CPU 使用率不能超过 50%
root# echo 50000 > /sys/fs/cgroup/cpu/wdj/cpu.cfs_quota_us
# 将 Proc PID 写入 procs
root# echo 30354 > /sys/fs/cgroup/cpu/wdj/cgroup.procs
# tasks 已经自动更新, # 此时 CPU 占用率会立即下降到 50%
root# cat /sys/fs/cgroup/cpu/wdj/tasks
30355
30356
30357
30358
# 同样的方式,再来限制下 CPU 核的使用
root# mkdir /sys/fs/cgroup/cpuset/wdj
# 限制只能使用 CPU 2,3 两个核
# 在使用前需要先执行,参考https://stackoverflow.com/questions/28348627/echo-tasks-gives-no-space-left-on-device-when-trying-to-use-cpuset
#root echo 0 > cpuset/wdj/cpuset.mems
#root echo 0 > cpuset/wdj/cpuset.cpus
echo 2,3 > /sys/fs/cgroup/cpuset/wdj/cpuset.cpu
# 这次我们将 Thread PID 写入 cgroup.procs
root# echo 30355 > /sys/fs/cgroup/cpu/wdj/cgroup.procs
# tasks 会自动更新为该 Proc下所有的 Thread PID
root# cat /sys/fs/cgroup/cpu/wdj/tasks
30355
30356
30357
30358
最终我们通过 htop 得到的效果如下:
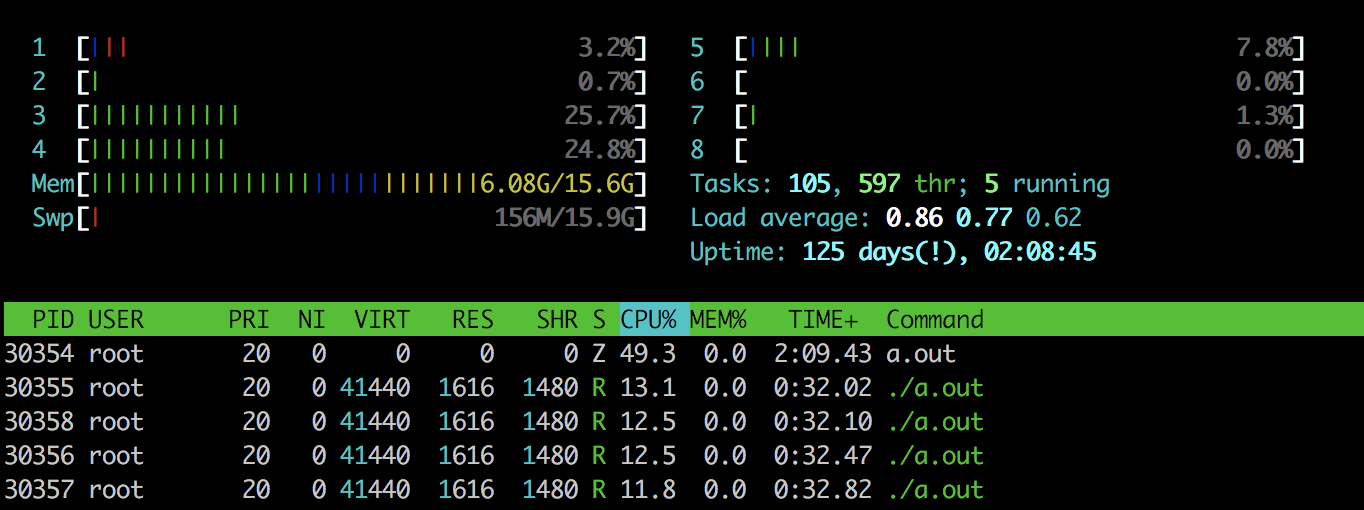
如果我们只将 Thread PID 如30356写入 /sys/fs/cgroup/cpu/wdj/tasks,则只会限制thread#1的CPU使用率。总结一下:
将 Thread PID 写入 tasks: 仅对该”线程”(LWP) 生效
将 Thread PID 写入 cgroup.procs: 会加入整个 Proc PID
将 Proc PID 写入 tasks: 没有效果,写不进去
将 Proc PID 写入 cgroup.procs: 会加入整个 Proc PID
表现有点怪异,还没找到具体原因,总的来说,目前的 CGroup 还有点乱:
Subsystem, Hierarchy, CGroup 三者的结构有点乱,将对进程的分组和对资源的控制混在了一起
由于 Linux 通过 LWP 实现 Thread,导致 CGroup 看起来可以对线程实现控制,但这方面机制不够健全,比如前面提到的加入机制
CGroup V2
CGroup V2 在 Linux Kernel 4.5中被引入,并且考虑到其它已有程序的依赖,V2 会和 V1 并存几年。针对于 CGroup V1 中 Subsystem, Herarchy, CGroup 的关系混乱,CGroup V2 中,引入 unified hierarchy 的概念,即只有一个 Hierarchy,仍然通过 mount 来挂载 CGroup V2:
mount -t cgroup2 none $MOUNT_POINT
挂载完成之后,目录下会有三个 CGroup 核心文件:
cgroup.controllers: 该文件列出当前 CGroup 支持的所有 Controller,如: cpu io memory
cgroup.procs: 在刚挂载时,Root CGroup 目录下的 cgroup.procs 文件中会包含系统当前所有的Proc PID(除了僵尸进程)。同样,可以通过将 Proc PID 写入 cgroup.procs 来将 Proc 加入到 CGroup
cgroup.subtree_control: 用于控制该 CGroup 下 Controller 开关,只有列在 cgroup.controllers 中的 Controller 才可以被开启,默认情况下所有的 Controller 都是关闭的。
这三个文件在所有的 CGroup 中都会生成,除此之外,在非 Root CGroup 下,还会有一个 cgroup.events 文件,该文件的 populated 字段会指出当前 CGroup 下的所有存活的 Proc PID,为1则表示其下存活的 Proc PID 数量>1,否则populated为0。这用于 CGroup V1的 release_agent 等事件通知,因为当最后一个进程退出 CGroup 时,cgroup.events 文件会被修改,从而触发事件。
# 查看当前 CGroup 支持的所有 Controllers
root# cat cgroup.controllers
cpu io memory
# 开启和关闭 Controller
root# echo "+cpu +memory -io" > cgroup.subtree_control
在 CGroup V2 中,A CGroup 开启了某个 Controller,则其直接子 CGroup B会生成对应的 Controller 接口文件(如 cpu.cfs_quota_us),并且B CGroup 的 cgroup.controllers 会更新。B也可以选择开启或关闭该 Controller,但影响的是 B 的直接子 CGroup。并且只有没有 Tasks 的 CGroup 即中间节点可以开关 Controller,只有叶子节点(和根节点)可以执行资源配置。这样每个节点要么控制子 CGroup 的 Controller 开关(中间节点),要么控制其下 Tasks 的资源配置(叶子节点),结构更清晰。
另外,CGroup V2 去掉了 Tasks 文件,增加了 cgroup.threads 文件,用于管理 LWP(仍然没有放弃对”线程”的支持),但语义上会清晰一些。
站在进程的角度来说,在挂载 CGroup V2时,所有已有Live Proc PID 都会加入到 Root CGroup,之后所有新创建的进程都会自动加入到父进程所属的 CGroup,由于 V2 只有一个 Hierarchy,因此一个进程同一时间只会属于一个 CGroup:
root# cat /proc/842/cgroup
...
0::/test-cgroup/test-cgroup-nested
总的来说,CGroup V2去掉了多个 Hierarchy 结构,使用 unified Hierarchy,对 Hierarchy 内部层级结构作出一些限制以保证层级逻辑清晰,并且优化了 CGroup 的文件组织(如 cgroup.events, cgroup.threads)。由于目前手头暂时没有 Kernel 4.5,只能通过文档大概了解下,还是要找机会实际体验一下。
Reference:
智能推荐
YOLOX学习_yolox voc split-程序员宅基地
文章浏览阅读159次。VOC——infraredUAV_yolox voc split
IOS—两个ViewController间传值_ios 两个页面传值-程序员宅基地
文章浏览阅读482次。IOS中,在两个ViewController之间传值有多种方式,这里学习其中一种,利用临时变量在两个ViewController之间传值,这可能不是最好的传值方式,但是也是一种选择。首先看看工程结构:其中ViewController是第一个界面,SecondViewController是第二个界面,UserEntity为一个实体对象,用来作为在两个界面间传值的媒介。_ios 两个页面传值
直流恒流源电路分析-运放恒流源设计_运放恒流电路-程序员宅基地
文章浏览阅读4.1k次。图四是由运放和三极管组成的V/I转换电路,输入信号Ui经R1加至A1的同相端,T1发射极接有负反馈电阻Rp和RL,负反馈信号经A2缓冲后,经由电阻R3加到A1反相端;因Ip2=0 ,流过负载的电流IL=Io=Ui/Rs,负载上的电流与电压成正比例函数关系,转换系数是1/Rs ,当Rs=500欧时,IL=0.002Ui 例如,若Ui=0。Io=Vref/Rs ,采样电阻Rs取不同的定值,即可得到不同大小的恒流源,但应注意Io(RL+Rs)应小于电源电压,并根据电流大小确定三极管和采样电阻Rs的功率参数。_运放恒流电路
独热编码python实现_标签编码、独热编码大不同 - Python 实现-程序员宅基地
文章浏览阅读550次。对于新手在做资料的特征工程时,会看到 Label Encoding 或 One Hot Encoding 两种对于类别行资料的编码方式,那他们之间究竟有什么不同呢?直接讲结论:原始资料是有序离散值的话 => Label Encoding原始资料是无序离散值的话 => One Hot Encoding (Dummies)以下分为两点说明:为什么要将离散转数值?因为大部分的模型都是基于数学..._python 对只对某几个标签独热编码
Android开发:标准身高计算器应用的… 分类: Android开发...-程序员宅基地
文章浏览阅读274次。主程序:package com.leansmall.heightcalculator;import android.app.Activity;import android.app.AlertDialog;import android.content.DialogInterface;import android.os.Bundle;import android.util.L..._安卓开发中开发身高计算器的知识点
【React】1040- 六个问题让你更懂 React Fiber-程序员宅基地
文章浏览阅读569次。大家好,我是零一,很多人都摸不透React,看不懂源码,甚至不想看源码(确实很难看懂啊!),"霸王硬上弓" 肯定是不行呀,不如从React的整体架构或者说从最核心的Fibe..._react无法进行静态节点分析
随便推点
Linux之父终于被劝动:用了30年的Linux内核C语言将升级至C11-程序员宅基地
文章浏览阅读144次。晓查 发自 凹非寺量子位 | 公众号 QbitAI还在使用89年版C语言的Linux内核,现在终于要做出改变了。今天,Linux开源社区宣布,未来会把内核C语言版本升级到C11,预计5.1..._linux的内核换成c11语言有什么影响吗
Java怎么配置环境变量?_java环境变量设置-程序员宅基地
文章浏览阅读2k次。作为一个开发者在自己的系统上面安装Java开发环境设置环境变量是必须会的一项技能。今天小千就来教大家如何去配置环境变量。配置步骤1.首先先要安装好Java环境,这个步骤比较简单,下一步即可,注意要记住我们的安装路径后面需要用到。之后我们在桌面此电脑图标上面点击右键,选择属性。在打开的页面中我们点击左侧的高级系统设置,之后就能够看到环境变量的按钮了。2.点击进去之后可以看到有两个变量设置,我们选择系统变量下面的新建选项,新建一个变量3.之后我们需要用到刚刚安装Java的路径了,在里面我们输入变量名_java环境变量设置
Navicat for MySQL 命令列 执行SQL语句 历史日志_sqlyog的历史记录在navicat中有吗-程序员宅基地
文章浏览阅读7.3k次。工具 下有命令列界面 或者在数据库上鼠标右键也有。_sqlyog的历史记录在navicat中有吗
时间序列预测——时序卷积网络(TCN)_tcn用于时间序列分类教程-程序员宅基地
文章浏览阅读3w次,点赞60次,收藏513次。 本文展示了使用时序卷积网络(TCN)进行时间序列预测的全过程,包含详细的注释。整个过程主要包括:数据导入、数据清洗、结构转化、建立TCN模型、训练模型(包括动态调整学习率和earlystopping的设置)、预测、结果展示、误差评估等完整的时间序列预测流程。 本文使用的tcn库在本人上传的资源中,链接为tcn.py 本文使用的数据集在本人上传的资源中,链接为mock_kaggle.csvimport pandas as pdimport numpy as npimport mathfro_tcn用于时间序列分类教程
ABP Vnext 4.4:统一Ef Core的DbContext/移除EF Core Migrations项目-程序员宅基地
文章浏览阅读507次。Abp vnext 4.4出现了一个比较重大的变更:在Startup template中移除了EF Core Migrations项目,本文翻译自community.abp.io/arti..._entityframeworkcore.dbmigrations
蓝桥杯专题-真题版含答案-【三角螺旋阵】【干支记年法】【异或加密法】【金字塔】_蓝桥杯 异或三角-程序员宅基地
文章浏览阅读155次,点赞4次,收藏5次。有真题,有答案,认认真真阅读,轻轻松松通过。蓝桥在等你。有什么需要欢迎文章底部卡片私我,获取更多支持,交流让学习不再孤单_蓝桥杯 异或三角