设备驱动模型:总线-设备-驱动_总线设备驱动模型-程序员宅基地
技术标签: 驱动开发
1 设备驱动模型简介
参考 以下内容:
- Linux 笔记:
https://xuesong.blog.csdn.net/article/details/109522945?spm=1001.2014.3001.5502 - 正点原子-左盟主 驱动开发
- 网络资料:https://www.cnblogs.com/lizhuming/category/1859545.html
1.1 概念
- 开发过程中,一般驱动已经由半导体厂家编写好了,而设备驱动一般也由设备器件的厂家编写好了,我们只需要提供设备信息即可,比如 I2C设备的话提供设备连接到了哪个 I2C 接口上,I2C 的速度是多少等等。
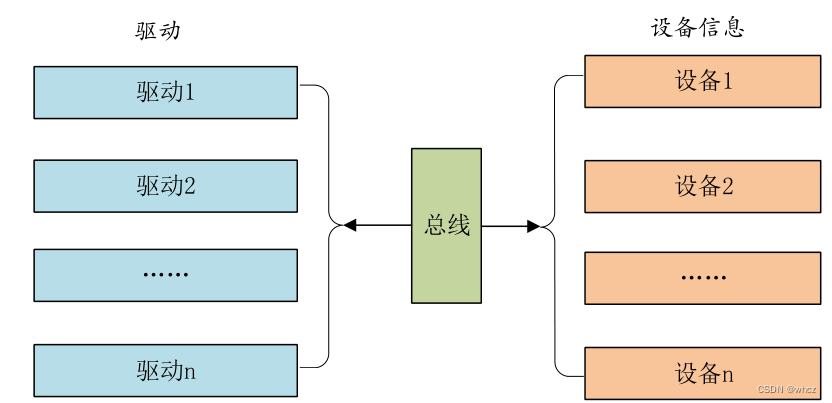
- 相当于将设备信息从设备驱动中剥离开来,驱动使用标准方法去获取到设备信息(比如从设备树中获取到设备信息),然后根据获取到的设备信息来初始化设备。这样就相当于驱动只负责驱动,设备只负责设备,想办法将两者进行匹配即可。这个就是 Linux中的总线(bus)、驱动(driver)和设备(device)模型,也就是常说的驱动分离。总线就是驱动和设备信息的月老,负责给两者牵线搭桥,如下图所示;
1.2 总线-设备-驱动
总线(bus):负责管理挂载对应总线的设备以及驱动;
设备(device):挂载在某个总线的物理设备;
驱动(driver):与特定设备相关的软件,负责初始化该设备以及提供一些操作该设备的操作方式;
以下只说 总线-设备-驱动 模式下的操作
- 总线管理着两个链表:设备链表 和 驱动链表。
- 当我们向内核注册一个驱动时,便插入到总线的驱动链表。
- 当我们向内核注册一个设备时,便插入到总线的设备链表。
- 在插入的同时,总线会执行一个 bus_type 结构体中的 match 方法对新插入的 设备/驱动进行匹配。(例如以名字的方式匹配。方式有很多总,下面再详细分析。)
- 匹配成功后,会调用 驱动 device_driver 结构体中的 probe 方法。(通常在 probe中获取设备资源。具体有开发人员决定。)
- 在移除设备或驱动时,会调用 device_driver 结构体中的 remove 方法;
2 总线
2.1 介绍:
总线是连接处理器和设备之间的桥梁
代表着同类设备需要共同遵循的工作时序。
总线驱动:
负责实现总线行为,管理两个链表。
struct bus_type {
const char *name;
const struct attribute_group **bus_groups;
const struct attribute_group **dev_groups;
const struct attribute_group **drv_groups;
int (*match)(struct device *dev, struct device_driver *drv);
int (*uevent)(struct device *dev, struct kobj_uevent_env *env);
int (*probe)(struct device *dev);
int (*remove)(struct device *dev);
int (*suspend)(struct device *dev, pm_message_t state);
int (*resume)(struct device *dev);
const struct dev_pm_ops *pm;
struct subsys_private *p;
};
- name:指定总线的名称,当新注册一种总线类型时,会在 /sys/bus 目录创建一个新的目录,目录名就是该参数的值;
- bus_groups、dev_groups、drv_groups:分别表示 总线、设备、驱动的属性。
通常会在对应的 /sys 目录下在以文件的形式存在,对于驱动而言,在目录 /sys/bus//driver/ 存放了驱动的默认属性;设备则在目录 /sys/bus//devices/ 中。这些文件一般是可读写的,用户可以通过读写操作来获取和设置这些 attribute 的值。 - match:当向总线注册一个新的设备或者是新的驱动时,会调用该回调函数。该设备主要负责匹配工作。
- uevent:总线上的设备发生添加、移除或者其它动作时,就会调用该函数,来通知驱动做出相应的对策。
- probe:当总线将设备以及驱动相匹配之后,执行该回调函数,最终会调用驱动提供的probe 函数。
- remove:当设备从总线移除时,调用该回调函数。
- suspend、resume:电源管理的相关函数,当总线进入睡眠模式时,会调用suspend回调函数;而resume回调函数则是在唤醒总线的状态下执行。
- pm:电源管理的结构体,存放了一系列跟总线电源管理有关的函数,与 device_driver 结构体中的 pm_ops 有关。
- p:该结构体用于存放特定的私有数据,其成员 klist_devices 和 klist_drivers 记录了挂载在该总线的设备和驱动。
match 函数,此函数很重要,单词 match 的意思就是“匹配、相配”,因此此函数就是完成设备和驱动之间匹配的,总线就是使用 match 函数来根据注册的设备来查找对应的驱动,或者根据注册的驱动来查找相应的设备,因此每一条总线都必须实现此函数。match 函数有两个参数:dev 和 drv,这两个参数分别为 device 和 device_driver 类型,也就是设备和驱动。
platform 总线是 bus_type 的一个具体实例,定义在文件 drivers/base/platform.c,platform 总
线定义如下
struct bus_type platform_bus_type = {
.name = "platform",
.dev_groups = platform_dev_groups,
.match = platform_match,
.uevent = platform_uevent,
.pm = &platform_dev_pm_ops,
};
platform_bus_type 就是 platform 平台总线,其中 platform_match 就是匹配函数。我们来看
一下驱动和设备是如何匹配的,platform_match 函数定义在文件 drivers/base/platform.c 中,函
数内容如下所示:
1 static int platform_match(struct device *dev,struct device_driver *drv)
2 {
3 struct platform_device *pdev = to_platform_device(dev);
4 struct platform_driver *pdrv = to_platform_driver(drv);
5
6 /*When driver_override is set,only bind to the matching driver*/
7 if (pdev->driver_override)
8 return !strcmp(pdev->driver_override, drv->name);
9
10 /* Attempt an OF style match first */
11 if (of_driver_match_device(dev, drv))
12 return 1;
13
14 /* Then try ACPI style match */
15 if (acpi_driver_match_device(dev, drv))
16 return 1;
/* Then try to match against the id table */
19 if (pdrv->id_table)
20 return platform_match_id(pdrv->id_table, pdev) != NULL;
21
22 /* fall-back to driver name match */
23 return (strcmp(pdev->name, drv->name) == 0);
24 }
驱动和设备的匹配有四种方法:
- 第一种匹配方式, OF 类型的匹配,也就是设备树采用的匹配方式, of_driver_match_device 函数定义在文件 include/linux/of_device.h 中。device_driver 结构体(表示设备驱动)中有个名为of_match_table的成员变量,此成员变量保存着驱动的compatible匹配表,设备树中的每个设备节点的compatible 属性会和 of_match_table 表中的所有成员比较,查看是否有相同的条目,如果有的话就表示设备和此驱动匹配,设备和驱动匹配成功以后 probe 函数 就会执行。
- 第二种匹配方式,ACPI 匹配方式。 第 19~20 行,
- 第三种匹配方式,id_table 匹配,每个 platform_driver 结构体有一个 id_table成员变量,顾名思义,保存了很多 id 信息。这些 id 信息存放着这个 platformd 驱动所支持的驱 动类型。
- 第四种匹配方式,如果第三种匹配方式的 id_table 不存在的话就直接比较驱动和 设备的 name字段,看看是不是相等,如果相等的话就匹配成功。
对于支持设备树的 Linux 版本号,一般设备驱动为了兼容性都支持设备树和无设备树两种匹配方式。也就是第一种匹配方式一般都会存在,第三种和第四种只要存在一种就可以,一般用的最多的还是第四种,也就是直接比较驱动和设备的 name 字段,毕竟这种方式最简单了。
其实,我看这个还是主要因为设备树;
当我们成功注册总线时,会在 /sys/bus/ 目录下创建一个新目录,目录名为我们新注册的总线名。
3 devices
在 /sys/devices 目录记录了系统中所有的设备。
/sys 下的所有设备文件和 /sys/dev 下的所有设备节点都是链接文件,实际上都指向了对应的设备文件。
device 结构体:
struct device
{
const char *init_name;
struct device *parent;
struct bus_type *bus;
struct device_driver *driver;
void *platform_data;
void *driver_data;
struct device_node *of_node;
dev_t devt;
struct class *class;
void (*release)(struct device *dev);
const struct attribute_group **groups; /* optional groups */
struct device_private *p;
};
内核源码路径:内核源码/include/linux/device.h。
- init_name:指定该设备的名称,总线匹配时,一般会根据比较名字来进行配对。
- parent:表示该设备的父对象,旧版本的设备之间没有任何联系,引入 Linux 设备驱动模块后,设备之间呈现树状结构,便于管理各种设备。
- bus:归属与哪个总线。当我们注册设备时,内核便会将该设备注册到对应的总线。
- of_node:存放设备树中匹配的设备节点。当内核使能设备树,总线负责将驱动的 of_match_table 以及设备树的
compatible 属性进行比较之后,将匹配的节点保存到该变量。 - platform_data:特定设备的私有数据,通常定义在板级文件中。
- driver_data:驱动层可以通过 dev_set/get_drvdata 函数来获取该成员变量。
- class:指向该设备对应类。
- dev:设备号。dev_t 类型。
- release:回调函数。当设备被注销时,该函数被调用。
- group:指向 struct attribute_group 类型指针指定该设备属性。
driver 结构体:
struct device_driver
{
const char *name;
struct bus_type *bus;
struct module *owner;
const char *mod_name; /* used for built-in modules */
bool suppress_bind_attrs; /* disables bind/unbind via sysfs */
const struct of_device_id *of_match_table;
const struct acpi_device_id *acpi_match_table;
int (*probe) (struct device *dev);
int (*remove) (struct device *dev);
const struct attribute_group **groups;
struct driver_private *p;
};
内核源码路径:内核源码/include/linux/device.h
- name:指定驱动名称,总线进行匹配时,利用该成员与设备名进行比较。
- bus:归属与哪个总线。内核需要保证在驱动执行之前,对应的总线能够正常工作。
- suppress_bind_attrs:布尔量,用于指定是否通过 sysfs 导出 bind 与 unbind文件,bind 与
unbind 文件是驱动用于绑定/解绑关联的设备。 - owner:表示该驱动的拥有者,一般设置为 THIS_MODULE。
- of_match_table:指定该驱动支持的设备类型。当内核使能设备树时,会利用该成员与设备树中的 compatible 属性进行比较。
- remove:当设备从操作系统中拔出或者是系统重启时,会调用该回调函数。
- probe:当驱动以及设备匹配后,会执行该回调函数,对设备进行初始化。通常的代码,都是以main函数开始执行的,但是在内核的驱动代码,都是从
probe 函数开始的。 - group:指向 struct attribute_group 类型的指针,指定该驱动的属性。
调用关系
platform_device_register
platform_device_add
device_add
bus_add_device // 放入链表
bus_probe_device // probe 枚举设备,即找到匹配的(dev, drv)
device_initial_probe
__device_attach
bus_for_each_drv(...,__device_attach_driver,...)
__device_attach_driver
driver_match_device(drv, dev) // 是否匹配
driver_probe_device // 调用 drv 的 probe
platform_driver_register
__platform_driver_register
driver_register
bus_add_driver // 放入链表
driver_attach(drv)
bus_for_each_dev(drv->bus, NULL, drv, __driver_attach);
__driver_attach
driver_match_device(drv, dev) // 是否匹配
driver_probe_device // 调用 drv 的 probe
智能推荐
艾美捷Epigentek DNA样品的超声能量处理方案-程序员宅基地
文章浏览阅读15次。空化气泡的大小和相应的空化能量可以通过调整完全标度的振幅水平来操纵和数字控制。通过强调超声技术中的更高通量处理和防止样品污染,Epigentek EpiSonic超声仪可以轻松集成到现有的实验室工作流程中,并且特别适合与表观遗传学和下一代应用的兼容性。Epigentek的EpiSonic已成为一种有效的剪切设备,用于在染色质免疫沉淀技术中制备染色质样品,以及用于下一代测序平台的DNA文库制备。该装置的经济性及其多重样品的能力使其成为每个实验室拥有的经济高效的工具,而不仅仅是核心设施。
11、合宙Air模块Luat开发:通过http协议获取天气信息_合宙获取天气-程序员宅基地
文章浏览阅读4.2k次,点赞3次,收藏14次。目录点击这里查看所有博文 本系列博客,理论上适用于合宙的Air202、Air268、Air720x、Air720S以及最近发布的Air720U(我还没拿到样机,应该也能支持)。 先不管支不支持,如果你用的是合宙的模块,那都不妨一试,也许会有意外收获。 我使用的是Air720SL模块,如果在其他模块上不能用,那就是底层core固件暂时还没有支持,这里的代码是没有问题的。例程仅供参考!..._合宙获取天气
EasyMesh和802.11s对比-程序员宅基地
文章浏览阅读7.7k次,点赞2次,收藏41次。1 关于meshMesh的意思是网状物,以前读书的时候,在自动化领域有传感器自组网,zigbee、蓝牙等无线方式实现各个网络节点消息通信,通过各种算法,保证整个网络中所有节点信息能经过多跳最终传递到目的地,用于数据采集。十多年过去了,在无线路由器领域又把这个mesh概念翻炒了一下,各大品牌都推出了mesh路由器,大多数是3个为一组,实现在面积较大的住宅里,增强wifi覆盖范围,智能在多热点之间切换,提升上网体验。因为节点基本上在3个以内,所以mesh的算法不必太复杂,组网形式比较简单。各厂家都自定义了组_802.11s
线程的几种状态_线程状态-程序员宅基地
文章浏览阅读5.2k次,点赞8次,收藏21次。线程的几种状态_线程状态
stack的常见用法详解_stack函数用法-程序员宅基地
文章浏览阅读4.2w次,点赞124次,收藏688次。stack翻译为栈,是STL中实现的一个后进先出的容器。要使用 stack,应先添加头文件include<stack>,并在头文件下面加上“ using namespacestd;"1. stack的定义其定义的写法和其他STL容器相同, typename可以任意基本数据类型或容器:stack<typename> name;2. stack容器内元素的访问..._stack函数用法
2018.11.16javascript课上随笔(DOM)-程序员宅基地
文章浏览阅读71次。<li> <a href = "“#”>-</a></li><li>子节点:文本节点(回车),元素节点,文本节点。不同节点树: 节点(各种类型节点)childNodes:返回子节点的所有子节点的集合,包含任何类型、元素节点(元素类型节点):child。node.getAttribute(at...
随便推点
layui.extend的一点知识 第三方模块base 路径_layui extend-程序员宅基地
文章浏览阅读3.4k次。//config的设置是全局的layui.config({ base: '/res/js/' //假设这是你存放拓展模块的根目录}).extend({ //设定模块别名 mymod: 'mymod' //如果 mymod.js 是在根目录,也可以不用设定别名 ,mod1: 'admin/mod1' //相对于上述 base 目录的子目录}); //你也可以忽略 base 设定的根目录,直接在 extend 指定路径(主要:该功能为 layui 2.2.0 新增)layui.exten_layui extend
5G云计算:5G网络的分层思想_5g分层结构-程序员宅基地
文章浏览阅读3.2k次,点赞6次,收藏13次。分层思想分层思想分层思想-1分层思想-2分层思想-2OSI七层参考模型物理层和数据链路层物理层数据链路层网络层传输层会话层表示层应用层OSI七层模型的分层结构TCP/IP协议族的组成数据封装过程数据解封装过程PDU设备与层的对应关系各层通信分层思想分层思想-1在现实生活种,我们在喝牛奶时,未必了解他的生产过程,我们所接触的或许只是从超时购买牛奶。分层思想-2平时我们在网络时也未必知道数据的传输过程我们的所考虑的就是可以传就可以,不用管他时怎么传输的分层思想-2将复杂的流程分解为几个功能_5g分层结构
基于二值化图像转GCode的单向扫描实现-程序员宅基地
文章浏览阅读191次。在激光雕刻中,单向扫描(Unidirectional Scanning)是一种雕刻技术,其中激光头只在一个方向上移动,而不是来回移动。这种移动方式主要应用于通过激光逐行扫描图像表面的过程。具体而言,单向扫描的过程通常包括以下步骤:横向移动(X轴): 激光头沿X轴方向移动到图像的一侧。纵向移动(Y轴): 激光头沿Y轴方向开始逐行移动,刻蚀图像表面。这一过程是单向的,即在每一行上激光头只在一个方向上移动。返回横向移动: 一旦一行完成,激光头返回到图像的一侧,准备进行下一行的刻蚀。
算法随笔:强连通分量-程序员宅基地
文章浏览阅读577次。强连通:在有向图G中,如果两个点u和v是互相可达的,即从u出发可以到达v,从v出发也可以到达u,则成u和v是强连通的。强连通分量:如果一个有向图G不是强连通图,那么可以把它分成躲个子图,其中每个子图的内部是强连通的,而且这些子图已经扩展到最大,不能与子图外的任一点强连通,成这样的一个“极大连通”子图是G的一个强连通分量(SCC)。强连通分量的一些性质:(1)一个点必须有出度和入度,才会与其他点强连通。(2)把一个SCC从图中挖掉,不影响其他点的强连通性。_强连通分量
Django(2)|templates模板+静态资源目录static_django templates-程序员宅基地
文章浏览阅读3.9k次,点赞5次,收藏18次。在做web开发,要给用户提供一个页面,页面包括静态页面+数据,两者结合起来就是完整的可视化的页面,django的模板系统支持这种功能,首先需要写一个静态页面,然后通过python的模板语法将数据渲染上去。1.创建一个templates目录2.配置。_django templates
linux下的GPU测试软件,Ubuntu等Linux系统显卡性能测试软件 Unigine 3D-程序员宅基地
文章浏览阅读1.7k次。Ubuntu等Linux系统显卡性能测试软件 Unigine 3DUbuntu Intel显卡驱动安装,请参考:ATI和NVIDIA显卡请在软件和更新中的附加驱动中安装。 这里推荐: 运行后,F9就可评分,已测试显卡有K2000 2GB 900+分,GT330m 1GB 340+ 分,GT620 1GB 340+ 分,四代i5核显340+ 分,还有写博客的小盒子100+ 分。relaybot@re...