IMU姿态融合(MPU9250从校正到滤波步骤)_mpu9250熔丝模式-程序员宅基地
联系方式:[email protected]
一、动机
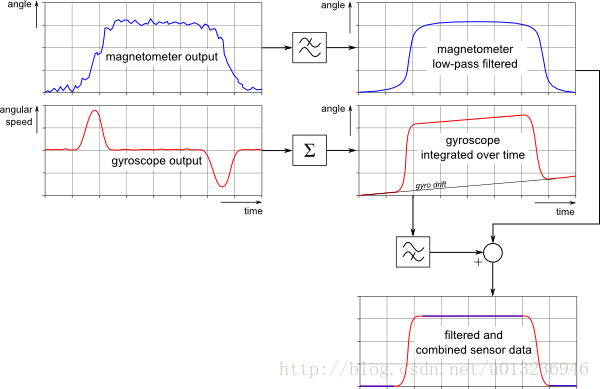
MPU9250包括三轴加速度计、三轴陀螺仪和三轴磁力计。因为加速度/磁力计具有高频噪声(需要低通滤波),将加速度/磁力计的信号看成是音频信号,它们的信号会有很多“毛刺“,也就是说它们的瞬时值不够精确,解算出来的姿态会震荡,但长期来看姿态方向是对的。而陀螺仪具有低频噪声(需要高通滤波),即每个时刻的得到的角速度是比较精确的,使用积分就能得到旋转角度(姿态),但是积分会累积误差,因此积分到后面姿态就不对了,也就是漂移现象。 加速度/磁力计和陀螺仪在频域上的特性互补,可以融合这三种传感器的数据,提高精度和系统的动态特性。
下图表示的是把传感器翻转90°一段时间后又翻转回来时,加速度/磁力计、陀螺仪以及融合传感信号,所求得的姿态信息:
然而对于原始的MPU9250来说,在进行姿态融合前需要对传感器进行校正等“预处理”。
二、步骤
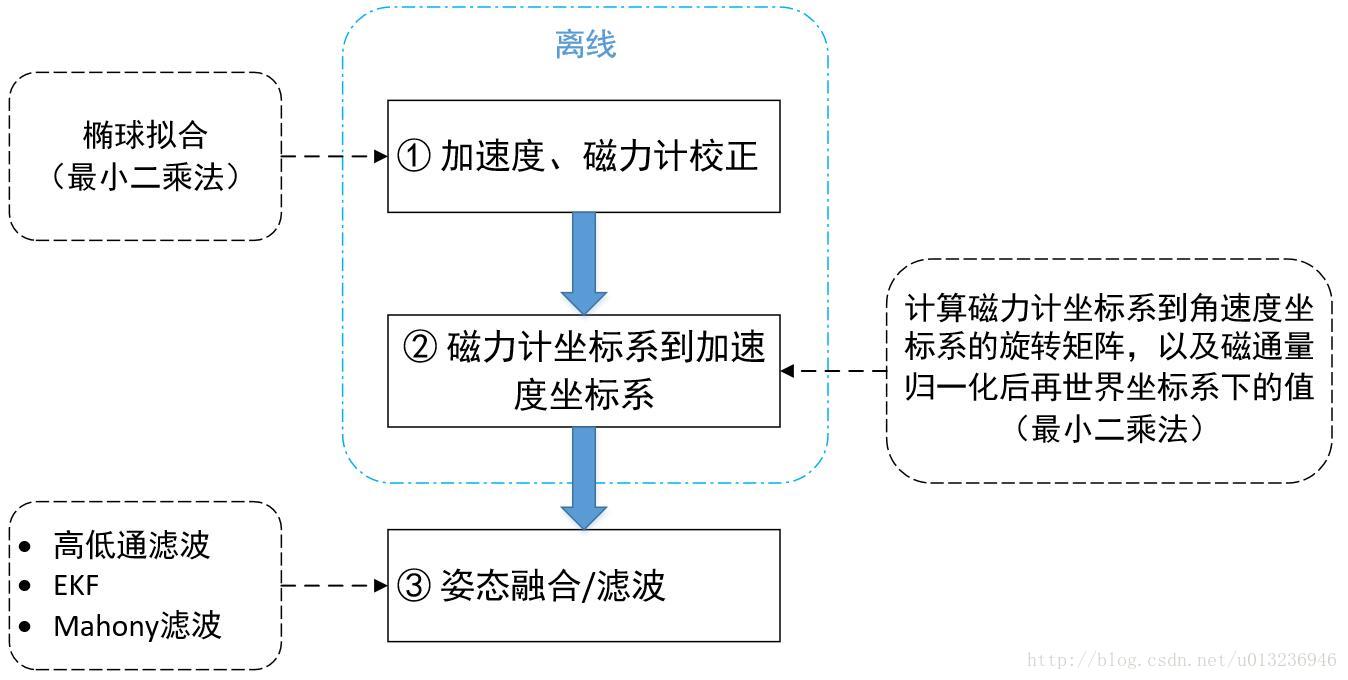
如上图所示,要对MPU9250进行姿态融合/滤波,大体需要三个步骤:1、校正,2、坐标转换,3、滤波。其中前两步需要离线执行。下面详解这三个步骤。
1. 传感器校正
按正常的情况来说,加速度传感器在静止状态(即只受重力作用),重力在各个姿态下,在三维空间中,向量顶点会落在一个球面上。但在IMU中,x,y,z轴的度量单位很大可能不相同,假设各轴之间相互直,各姿态重力点会落在一个椭球面上,椭球的中心也不一定在原点,这其实就是加速度的偏移量。
在磁力计上,由于测量磁场强度,在环境不变的情况下,传感器每个姿态感受磁场强度是相同的,所以不需要静止状态,磁力计测量的x,y,z轴值,在没有偏差且传感器内部x,y,z轴相互垂直的情况下,在三维空间中组成一个圆球面。但是磁力计存在Hard Iron Distortion和Soft Iron Distortion,使得x,y,z轴度量单位不相同,各轴也并非相互垂直,椭球球心也并非[0,0,0]坐标。
总的来说加速度/磁力计校正,需要求出椭球的球心(偏移量)、椭球轴长(各轴单位长度;其实磁力计不需要求,后面会解释。),即椭球拟合。
加速度计校正
- 在离线数据中寻找静止状态下的加速度传感器值,假设静止时的不同姿态共有 n 个,则得到数据
accData∈Rn×3 ; - accData∈Rn×3 作为样本数据,使用最小二乘法即可求出椭球方程的各个参数,接着根据我师兄博客的方法可以求出椭球的球心(偏移量)和轴长。
磁力计校正
- 提取离线数据的磁力计传感器的值(不需要静止状态),得到样本数据 magData∈Rm×3 , 假设有m组数据;
- magData∈Rm×3 作为样本数据,使用最小二乘法即可求出椭球方程的各个参数,进一步求出球心(偏移量)和轴长(轴长可忽略)。
陀螺仪校正
陀螺仪不存在椭球的问题,因此可以直接从离线数据中找到静止状态下的数据,对数据求均值即可得到偏移量。
2. 磁力计坐标系转换到加速度坐标系
磁力计的基坐标系和加速度的基坐标系(我们以加速度的基坐标系作为世界坐标系)并不一定是一样的,比如加速度的基坐标系x轴指向东,磁力计的指向北。因此,需要将磁力计坐标系转换到加速度计坐标系,才能通过加速度/磁力计解算出正确的姿态。
假设加速度计测量到的重力加速度向量是 ug ,磁力计测量到的磁通量是 vm ,首先要将 vm 从椭球上投射到正球上,投射方程为 rm=Avm 。 rm 是投射后的向量, A 为
其次求出 rm 转换到加速度计坐标系的旋转矩阵 R ,得到
椭球转换正球和旋转变换都已经包括在矩阵 B 里了,再次使用 最小二乘法求出
磁通量在世界坐标系下的x轴分量为0,重力加速度方向固定不变和z轴一致,通过向量点乘可以求出归一化后磁通量在世界坐标系下z轴的分量,再用模长公式求出y轴的分量。最后得到磁通量在世界坐标系下的向量 wm ,用于滤波时的校正。
3. 姿态融合
在使用各种滤波方法(如高低通滤波,EKF,Mahony)做姿态融合时,可以基于欧拉角、方向余弦和四元数等方法。欧拉角在求解姿态时存在奇点(万向节锁),不能用于全姿态解算;方向余弦可用于全姿态解算但计算量大,不能满足实时性要求;四元数,计算量小,无奇点,满足实时解算。
所以这里使用的是基于四元数姿态融合,滤波方法包括高低通滤波、EKF、Mahony滤波。下面简单介绍这三种算法的大致思想:
高低通滤波
两个方程说明问题
Quaternion 是姿态融合后的四元数, gyroSensorQ 是陀螺仪测量到的角速度所代表的瞬时四元数, Quaternion(t)^ 是使用陀螺仪推算 t 时刻的估计姿态,
EKF
广义卡尔曼滤波,主要有两步:估算、校正。(公式和推导不详述)。
- 估算:和高低通滤波一样,使用陀螺仪估算出 t 时刻四元数;
- 校正:计算出估算姿态下的重力加速度和磁通量向量,再用加速度/磁力计测量到的重力加速度和磁通量向量按照EKF校正方程进行校正。
Mahony滤波
主要是使用了PI控制器思想(未深入,理解有偏差欢迎指出)。同样也分两步:估算、校正。
- 估算:和前面一样,使用陀螺仪估算出
t 时刻四元数; - 校正:计算出估算姿态下的重力加速度和磁通量向量,再用加速度/磁力计测量到的重力加速度和磁通量向量叉乘估算姿态的计算结果,得到的是估算姿态与测量姿态的误差 e 。
e 可以对陀螺仪测量到的角速度进行补偿,使用的是PI控制进行补偿。其中P用于控制加速度计和陀螺仪之间的交叉频率,I用于校正陀螺仪误差。使用补偿后的角速度重新估算出 t 时刻四元数,此时已达到了滤波效果。
三、实验结果
加速度计椭球拟合
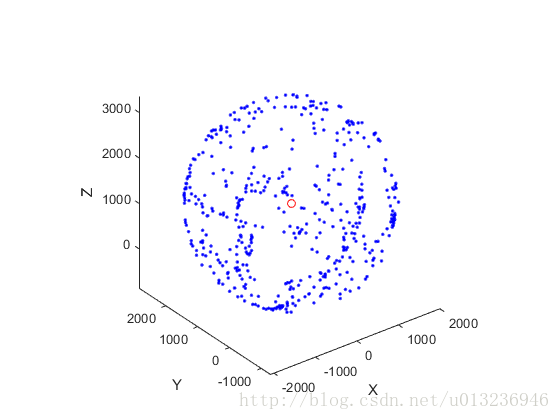
上图更像一个球,但球心明显偏离
磁力计椭球拟合
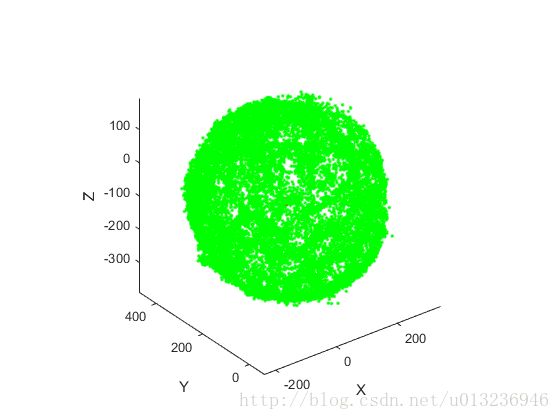
同样球心明显偏离 [0,0,0] 。
四元数姿态估计
下图中第一到第四行分别是四元数4个值在使用各种方法估计姿态时的变化情况,第五行是角速度的变化情况。

可以看到,除了Gyro估计的姿态,其他三种滤波算法估算的姿态基本一样。
Matlab实验视频:
height="500" width="800" src="http://player.youku.com/embed/XMjgxOTUzMDE0NA==">
前面两个图是加速度计和磁力计的椭球拟合;后一个图是各姿态融合算法对比,可以看到陀螺仪估算的姿态随时间累积误差变大,加速度/磁力计估算的姿态有明显的抖动(高频噪声),其他三种姿态融合算法效果差别不大。
计算时间 Mahony < 高低通 < EKF
手机端姿态融合
属于实验室张欣博士师兄的成果,非本人的工作。
height="500" width="800" src="http://player.youku.com/embed/XMjUxMDM5Mjk0MA==">
蓝牙传输的数据为100Hz
计算所用的时间 : Mahony < 高低通 < EKF
致谢:以上工作由张欣师兄指导完成,感谢师兄!
智能推荐
彻底扒光 通过智能路由器拆解看其本质-程序员宅基地
文章浏览阅读1.7k次。可以看到很多联发科的MT芯片摘自:https://net.zol.com.cn/531/5312999.html彻底扒光 通过智能路由器拆解看其本质2015-07-23 00:40:00[中关村在线 原创] 作者:陈赫|责编:白宁收藏文章 分享到 评论(24)关注智能路由器拆解的朋友们注意啦!我们已经将这五款产品彻底扒开,将主板的真容展现在了大家的眼前。网友们可以看见这些智能路由器主板的做工和用料,我们还为网友们展示了主要的电子元器件,供大家品评观赏。..._路由器拆解
Java--深入JDK和hotspot底层源码剖析Thread的run()、start()方法执行过程_jdk的源码hotspot跟jdk是分开的-程序员宅基地
文章浏览阅读2.1k次,点赞101次,收藏78次。【学习背景】今天主要是来了解Java线程Thread中的run()、start()两个方法的执行有哪些区别,会给出一个简单的测试代码样例,快速理解两者的区别,再从源码层面去追溯start()底层是如何最终调用Thread#run()方法的,个人觉得这样的学习不论对面试,还是实际编程来说都是比较有帮助的。进入正文~学习目录一、代码测试二、源码分析2.1 run()方法2.2 start()方法三、使用总结一、代码测试执行Thread的run()、start()方法的测试代码如下:public_jdk的源码hotspot跟jdk是分开的
透视俄乌网络战之一:数据擦除软件_俄乌网络战观察(一)-程序员宅基地
文章浏览阅读4.4k次,点赞90次,收藏85次。俄乌冲突中,各方势力通过数据擦除恶意软件破坏关键信息基础设施计算机的数据,达到深度致瘫的效果,同时窃取重要敏感信息。_俄乌网络战观察(一)
Maven私服仓库配置-Nexus详解_nexus maven-程序员宅基地
文章浏览阅读1.7w次,点赞23次,收藏139次。Maven 私服是一种特殊的Maven远程仓库,它是架设在局域网内的仓库服务,用来代理位于外部的远程仓库(中央仓库、其他远程公共仓库)。当然也并不是说私服只能建立在局域网,也有很多公司会直接把私服部署到公网,具体还是得看公司业务的性质是否是保密的等等,因为局域网的话只能在公司用,部署到公网的话员工在家里也可以办公使用。_nexus maven
基于AI的计算机视觉识别在Java项目中的使用 (四) —— 准备训练数据_java ocr ai识别训练-程序员宅基地
文章浏览阅读934次。我先用所有的样本数据对模型做几轮初步训练,让深度神经模型基本拟合(数万条记录的训练集,识别率到99%左右),具备初步的识别能力,这时的模型就是“直男”。相较于训练很多轮、拟合程度很高的“油腻男”,它的拟合程度较低,还是“直男愣头青”。..............._java ocr ai识别训练
hibernate 数据库类型 date没有时分秒解决_hibernate解析時間只有年月日沒有時分秒-程序员宅基地
文章浏览阅读688次。一、问题现象: 在数据库表中日期字段中存的日期光有年月日,没有时分秒。二、产生原因:三 解决办法 检查表的相应映射xml文件。 <property name="operateDate" type="Date">如果同上面所写,那问题出在 type类型上了正确写法 :<property name="operateDate" type="java.util..._hibernate解析時間只有年月日沒有時分秒
随便推点
springbbot运行无法编译成功,找不到jar包报错:Error:(3, 46) java: 程序包org.springframework.context.annotation不存在-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏2次。文章目录问题描述:解决方案:问题描述:提示:idea springbbot运行无法编译成功,找不到jar包报错E:\ideaProject\demokkkk\src\main\java\com\example\demo\config\WebSocketConfig.javaError:(3, 46) java: 程序包org.springframework.context.annotation不存在Error:(4, 46) java: 程序包org.springframework.conte_error:(3, 46) java: 程序包org.springframework.context.annotation不存在
react常见面试题_recate面试-程序员宅基地
文章浏览阅读6.4k次,点赞6次,收藏36次。1、redux中间件中间件提供第三方插件的模式,自定义拦截 action -> reducer 的过程。变为 action -> middlewares -> reducer 。这种机制可以让我们改变数据流,实现如异步 action ,action 过滤,日志输出,异常报告等功能。常见的中间件:redux-logger:提供日志输出redux-thunk:处理异步操作..._recate面试
交叉编译jpeglib遇到的问题-程序员宅基地
文章浏览阅读405次。由于要在开发板中加载libjpeg,不能使用gcc编译的库文件给以使用,需要自己配置使用另外的编译器编译该库文件。/usr/bin/ld:.libs/jaricom.o:RelocationsingenericELF(EM:40)/usr/bin/ld:.libs/jaricom.o:RelocationsingenericELF(EM:40)...._jpeg_utils.lo: relocations in generic elf (em: 8) error adding symbols: file
【办公类-22-06】周计划系列(1)“信息窗” (2024年调整版本)-程序员宅基地
文章浏览阅读578次,点赞10次,收藏17次。【办公类-22-06】周计划系列(1)“信息窗” (2024年调整版本)
SEO优化_百度seo resetful-程序员宅基地
文章浏览阅读309次。SEO全称为Search Engine Optimization,中文解释为搜索引擎优化。一般指通过对网站内部调整优化及站外优化,使网站满足搜索引擎收录排名需求,在搜索引擎中提高关键词排名,从而把精准..._百度seo resetful
回归预测 | Matlab实现HPO-ELM猎食者算法优化极限学习机的数据回归预测_猎食者优化算法-程序员宅基地
文章浏览阅读438次。回归预测 | Matlab实现HPO-ELM猎食者算法优化极限学习机的数据回归预测_猎食者优化算法