思岚激光雷达+cartographer建图_思岚a1与cartographer-程序员宅基地
技术标签: slam 自动驾驶 cartographer ubuntu
系统环境:
Ubuntu18.04
ROS Melodic
gcc 7.5.0
1.安装思岚ROS包
1.1 clone并编译
cd catkin_ws/src/
git clone https://github.com/Slamtec/rplidar_ros.git
cd ..
catkin_make
1.2 修改rplidar_ros/launch/rplidar.launch中的波特率

1.3 试一下效果
source devel/setup.bash
roslaunch rplidar_ros view_rplidar.launch效果如图
2.部署cartographer
参考官方文档
sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
# 此处为cartographer新建了一个ws
mkdir carto_ws
cd carto_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
# 安装依赖
# 如果安装ROS的时候执行过'sudo rosdep init',那么这里会报错,报错可以忽略
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
# 安装abseil-cpp library
src/cartographer/scripts/install_abseil.sh
# 编译并安装
catkin_make_isolated --install --use-ninja试一下官方给的demo
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
source install_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
这里是2D的bag,3D的文件太大,故没有下载
如果成功了则可进行下一步
3.使用自己的激光雷达数据
3.1 修改revo_lds.lua
gedit carto_ws/src/cartographer_ros/cartographer_ros/configuration_files/revo_lds.lua我的lua如下:
include "map_builder.lua"
include "trajectory_builder.lua"options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "laser",
published_frame = "laser",
odom_frame = "base_link",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_pose_extrapolator = true,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65return options
3.2 修改demo_revo_lds.launch
gedit carto_ws/src/cartographer_ros/cartographer_ros/launch/demo_revo_lds.launch我的launch如下:
<launch>
<param name="/use_sim_time" value="false" /><node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename revo_lds.lua"
output="screen">
<remap from="scan" to="scan" />
</node><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" /><node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
</launch>
3.3 再次编译
cd carto_ws
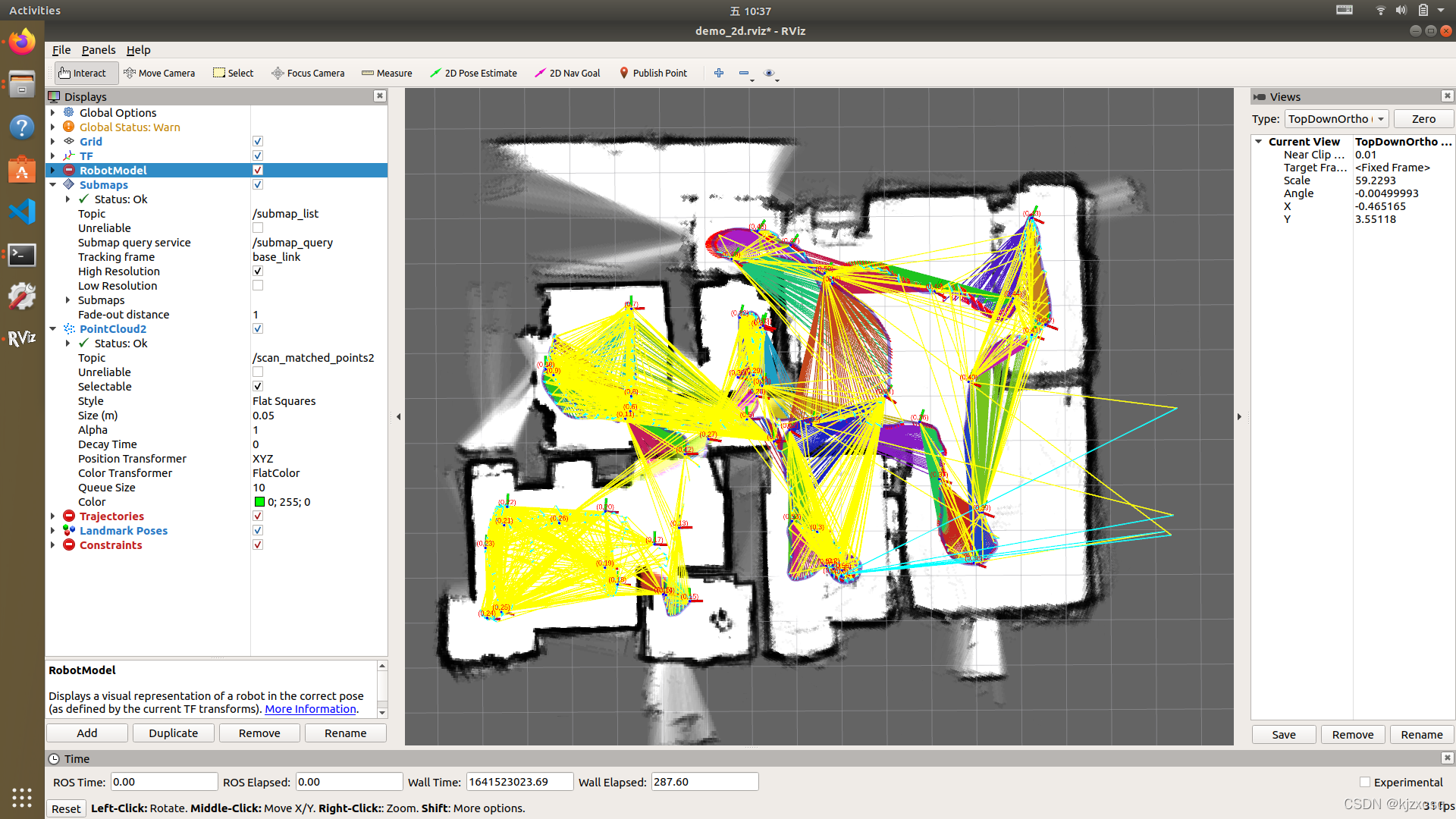
catkin_make_isolated --install --use-ninja4.试一下效果
roslaunch rplidar_ros rplidar.launch
roslaunch cartographer_ros demo_revo_lds.launch如果找不到包,记得source setup.bash
效果如下
5.参考文章
Cartographer ROS Integration — Cartographer ROS documentation
使用思岚A2激光雷达结合cartographer建图算法手持建图_这个昵称已已已存在的博客-程序员宅基地_cartographer手持建图
智能推荐
JRebel热部署 xml文件修改 sql文件修改 不生效_jrebel 不更新sql-程序员宅基地
文章浏览阅读3.2k次。JRebel热部署 xml文件修改 sql文件修改 不生效_jrebel 不更新sql
论文学习笔记 POSEIDON: Privacy-Preserving Federated Neural Network Learning_poseidon: privacypreserving federated neural netwo-程序员宅基地
文章浏览阅读1.6k次,点赞6次,收藏14次。论文学习笔记 POSEIDON: Privacy-Preserving Federated Neural Network LearningNDSS 2021录用文章目录论文学习笔记 POSEIDON: Privacy-Preserving Federated Neural Network Learning一、机器学习1. 机器学习(ML)中的挑战2. 隐私保护机器学习(PPML)二、POSEIDON方案1. 系统和威胁模型2. 方案总览多方同态加密(MHE)联邦学习主要挑战和解决方法3. 方案CKKS_poseidon: privacypreserving federated neural network learning
opentsdb远程代码执行(CVE-2020-35476)-程序员宅基地
文章浏览阅读1.9k次。1漏洞背景OpenTSDB(Open Time Series Data Base)是基于HBASE构建的分布式、可扩展的时间序列数据库。OpenTSDB可以获取电力行业、化工行业、物联网行业等各类型实时监测、检查与分析设备所采集、产生的时间序列数据,并提供存储、索引以及图形化服务,使其易于访问和可视化。2 漏洞原理OpenTSDB 2.4.0及之前版本中存在远程代码执行漏洞,用户提交的yrange参数或其他相关参数的值在/src/tsd/GraphHandler.java文件中进行简单的反引号._cve-2020-35476
警惕rapidxml的陷阱(二):在Android上默认内存池分配数组过大,容易导致栈溢出_an element node. name contains element name. value-程序员宅基地
文章浏览阅读995次。项目中我们的模块很快写好了,在windows和linux上测试都工作的很好,但在Android上有时候却会崩溃。背景:我们的模块是c++写的,编译成so动态库在不同的平台(linux,windows,Android)上运行;Android上我们包装了一个service,通过jni加载so动态库运行的。 解决程序崩溃问题,首先要找到崩溃点。但我们的程序是service+jni的形式,直接_an element node. name contains element name. value contains text of first da
6.4.3 Xacro_完整使用流程示例_ros6.4-程序员宅基地
文章浏览阅读628次,点赞3次,收藏4次。ROS入门 6.4.3 Xacro_完整使用流程示例《ROS入门-理论与实践》视频教程镇楼》需求描述:使用 Xacro 优化 URDF 版的小车底盘模型实现结果演示:1.编写 Xacro 文件<!-- 使用 xacro 优化 URDF 版的小车底盘实现: 实现思路: 1.将一些常量、变量封装为 xacro:property 比如:PI 值、小车底盘半径、离地间距、车轮半径、宽度 .... 2.使用 宏 封装驱动轮以及支撑轮实现,调用相关_ros6.4
C++BUG: [Error] invalid array assignment-程序员宅基地
文章浏览阅读2.4w次,点赞11次,收藏32次。C++BUG: [Error] invalid array assignment1. Introduction2. memcpy()函数原型功能头文件返回值与strcpy的区别实例1. Introduction在使用数组给数组赋值时,会出现以上bug。大致的栗子如下:while(!student.eof()){ SS[j].name=stud.name;//报错! SS[j].ID=stud.ID; SS[j].score=stud.score; _invalid array assignment
随便推点
QCC305x-QCC304x系列开发教程(系统篇)之3.2-音频子系统详解_qcc 音频子系统开发-程序员宅基地
文章浏览阅读2.3k次。音频子系统功能:CPU时钟选项(灵活的时钟选项从2 MHz到120 MHz音频处理) 程序ROM: 6Mb 程序RAM/缓存:112KB 数据RAM大小:448KB 模拟DAC:单模模拟输出可配置为差分ab类音频输出或差分高效率输出 模拟ADC:立体声模拟输入可配置为单端线输入,或不平衡或平衡模拟麦克风输入 I2s/脉冲编码调制(PCM)接口1 x单向24位i2s接口 支持8kHz,16kHz,32kHz,44.1 kHz,48kHz,96kHz,192kHz,384kHz采样速..._qcc 音频子系统开发
ArcGIS API for JavaScript——地图展示分享-程序员宅基地
文章浏览阅读363次,点赞8次,收藏9次。https://zhuanlan.zhihu.com/p/93662287
音频特征提取——pyAudioAnalysis工具包-程序员宅基地
文章浏览阅读4.4k次。转载:http://www.cnblogs.com/xingshansi/p/6806637.html前言语音识别等应用离不开音频特征的提取,最近在看音频特征提取的内容,用到一个python下的工具包——pyAudioAnalysis: An Open-Source Python Library for Audio Signal Analysis,该工具包的说明文档可以点击这里下载,对应的gith..._pyaudioanalysis
LaTeX数学符号大全_latex 数学符号-程序员宅基地
文章浏览阅读10w+次,点赞407次,收藏1.6k次。本篇博文介绍一些常用的LaTeX符号,方便使用时查询。文章目录1.操作符2.关系符3.希腊字母小写大写4.箭头5.点6.上标7.其他8.命令符9.跨行或跨列的符号:1.操作符SymbolCommandSymbolCommandSymbolCommand±\pm±\pm∓\mp∓\mp×\times×\times÷\div÷\div⋅\cdot⋅..._latex 数学符号
Spring Security ,Spring Actuator添加登录认证_spring security actuator-程序员宅基地
文章浏览阅读3.7k次。一、继承WebSecurityConfigurerAdapter@Configuration(proxyBeanMethods = false)public class ActuatorSecurity extends WebSecurityConfigurerAdapter {}二、 配置限制1. 不认证@Overrideprotected void configure(HttpSecurity http) throws Exception { ..._spring security actuator
java调用shell命令并获取执行结果_java执行shell命令 结果正常但实际没有执行-程序员宅基地
文章浏览阅读1.3w次。使用到Process和Runtime两个类,返回值通过Process类的getInputStream()方法获取[plain] view plain copypackage ark; import java.io.BufferedReader; import java.io.IOException; import java._java执行shell命令 结果正常但实际没有执行